




正文
在实际情况中,对于一个空间,我们通常只能获取到这个空间的随意一组基,这样的一组基内的向量大概率不是正交关系的,我们得到的空间的基与矩阵的形状密切相关。但是,对于给定的一个空间的一组基,我们可以进一步的找到这个空间的一组正交基,一个空间的标准正交基方便计算 。
获取空间的一组标准正交基的步骤
- 首先,获取空间的一组基
- 继而求取空间的正交基
- 最后获取空间的标准正交基u^\hat uu^,u^=1∥u⃗∥⋅u⃗=(u1∥u⃗∥,u2∥u⃗∥,⋯ ,un∥u⃗∥)\hat u = \frac {1}{\| \vec u\|} \cdot \vec u = (\frac {u_1}{\| \vec u\|},\frac {u_2}{\| \vec u\|},\cdots , \frac {u_n}{\| \vec u\|})u^=∥u∥1⋅u=(∥u∥u1,∥u∥u2,⋯,∥u∥un)
从上面整个步骤可以看出,求取一个空间的标准正交基,关键是求取空间的正交基。
求取一个二维平面的一组正交基
在一个二维空间,给出空间的任意一组基u⃗, v⃗\vec u , \ \vec vu, v,首先这两个向量一定不共线,那么在二维平面这两向量可以表示成
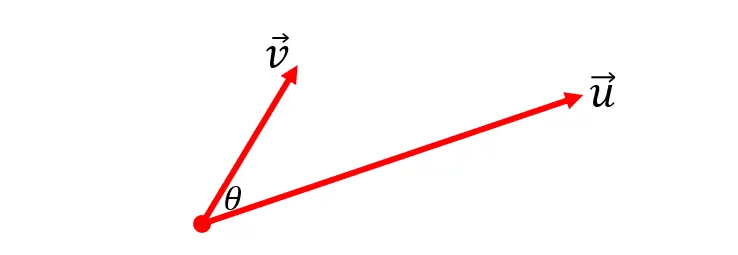
然后通过这组向量来求取二维平面的正交基,只需让这组向量的其中一个向量保持不变,令另一个向量与保持不变的这向量垂直,这样就得到了二维平面的一组正交基。这里假设让这个二维平面的基中的向量u⃗\vec uu保持不变。
接下来需要找到一个与向量u⃗\vec uu垂直的向量:具体操作为
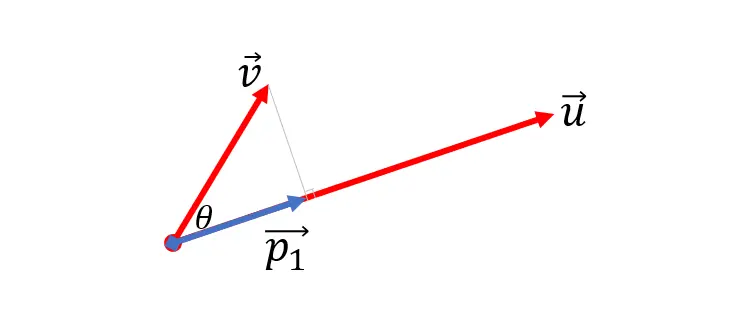
① 从向量v⃗\vec vv向u⃗\vec uu作投影,即向量v⃗\vec vv所在的线段的末端向向量u⃗\vec uu所在的线代作垂线,那以垂足的位置作为另外一个向量p⃗1\vec p_1p1的末端,那么这个向量p⃗1\vec p_1p1就是向量v⃗\vec vv在向量u⃗\vec uu的投影。
②通过向量p⃗1\vec p_1p1,进一步就可以通过向量减法,求出与向量u⃗\vec uu垂直的那个向量p⃗2\vec p_2p2 ,按照向量的平行四边形法则,向量p⃗2\vec p_2p2加上p⃗1\vec p_1p1 向量得到v⃗\vec vv向量,所以 p⃗2=v⃗−p⃗1\vec p_2= \vec v - \vec p_1p2=v−p1:
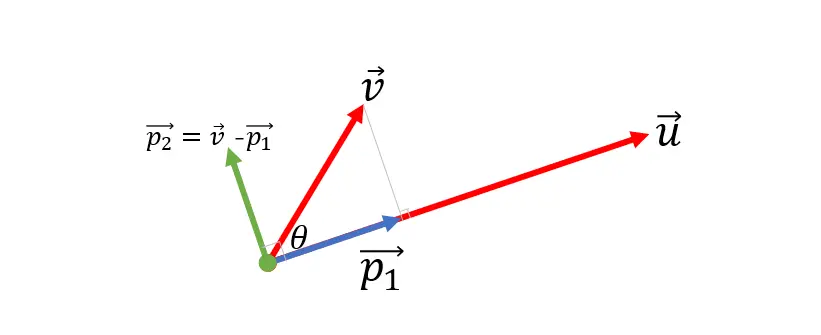
至此,就在在一个二维空间找到的两个向量p⃗2\vec p_2p2和向量u⃗\vec uu,它们就是这个二维空间的一组正交基。在这个过程中,核心就是求出向量v⃗\vec vv在u⃗\vec uu的投影向量p⃗1\vec p_1p1。
求出投影向量p⃗1\vec p_1p1
对于向量的点乘u⃗⋅v⃗=∥u⃗∥⋅∥v⃗∥⋅cosθ\vec u \cdot \vec v = \| \vec u \| \cdot \| \vec v \| \cdot \cos \thetau⋅v=∥u∥⋅∥v∥⋅cosθ
根据三角函数的知识,就有向量的p⃗1\vec p_1p1的模∥p⃗1∥=∥v⃗∥⋅cosθ=u⃗⋅v⃗∥u⃗∥\| \vec p_1 \| = \| \vec v \| \cdot \cos \theta = \frac {\vec u \cdot \vec v}{\| \vec u \|}∥p1∥=∥v∥⋅cosθ=∥u∥u⋅v
由于向量p⃗1\vec p_1p1与向量u⃗\vec uu共线,所以向量p⃗1\vec p_1p1的方向等于向量u⃗\vec uu的方向,向量u⃗\vec uu的方向就是它的标准单位方向向量,即u⃗∥u⃗∥\frac {\vec u}{\| \vec u\|}∥u∥u
最后,由向量p⃗1\vec p_1p1的标准单位方向向量和向量p⃗1\vec p_1p1的模相乘就可以完整表示向量p⃗1=∥p⃗1∥⋅u⃗∥u⃗∥=u⃗⋅v⃗∥u⃗∥⋅u⃗∥u⃗∥=u⃗⋅v⃗∥u⃗∥2⋅u⃗\vec p_1 = \| \vec p_1 \| \cdot \frac {\vec u}{\| \vec u\|} = \frac {\vec u \cdot \vec v}{\| \vec u \|} \cdot \frac {\vec u}{\| \vec u\|} = \frac {\vec u \cdot \vec v}{\| \vec u \|^2} \cdot {\vec u}p1=∥p1∥⋅∥u∥u=∥u∥u⋅v⋅∥u∥u=∥u∥2u⋅v⋅u
又 ∵u⃗⋅u⃗=∥u⃗∥2\because \vec u \cdot \vec u = \| \vec u \|^2∵u⋅u=∥u∥2
∴p⃗1=u⃗⋅v⃗u⃗⋅u⃗⋅u⃗\therefore \vec p_1 = \frac {\vec u \cdot \vec v}{\vec u \cdot \vec u} \cdot {\vec u}∴p1=u⋅uu⋅v⋅u,注意不能约分,向量点乘与标量数乘是不一样的。
通过向量p⃗1\vec p_1p1,进而就可以计算出与向量u⃗\vec uu正交的向量p⃗2=v⃗−p⃗1\vec p_2 = \vec v - \vec p_1p2=v−p1
这样,就通过二维空间中任意的一组基u⃗\vec uu 和 v⃗\vec vv获得了空间中的一组正交基p⃗2\vec p_2p2和u⃗\vec uu



















 1828
1828

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











