




承接上一篇结尾提出的问题,接下来的文章会着重介绍DAG的账本共识SPECTRE协议。从上一篇(《从区块链到DAG(二)--DAG的基本结构》)可以看出,DAG的整个网络并不是线性的。SPECTRE协议顺应了这种结构所以并没有提出选择主链的概念,而是着眼于解决冲突交易和防止恶意攻击。这里需要声明一下,所有讨论账本共识有效有个大前提:网络中大多数节点都是诚实的。我们不考虑集中超过51%算力的这种恶意攻击,因为无论用什么账本共识这样的攻击都会奏效。
1. SPECTRE如何解决冲突交易
SPECTRE通过区块间的投票来排除冲突的交易,如图1。
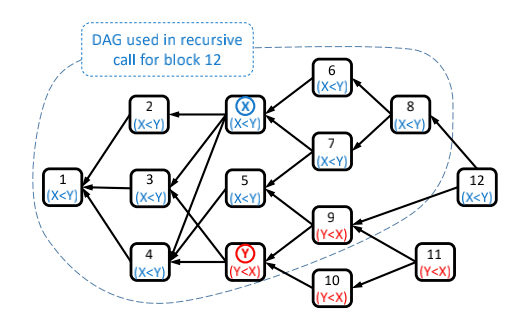
图片1 一个简单的DAG网络的投票过程
来源:Yonatan Sompolinsky, Yoad Lewenberg, and Aviv Zohar,《SPECTRE:Serialization of Proof-of-work Events: Confifirming Transactions viaRecursive Elections》
区块X里记录的交易信息是交易x先于交易y发生,记为x<y ;区块Y里记录的交易信息是交易y先于交易x发生,记为y<x,这两个交易相互冲突。
投票过程:
区块X和区块Y分别投票给自己。
区块X之后产生的区块我们称之为X的未来区块,回溯这些未来区块发现6,7,8只能回溯到X,所以这三个区块都投票给X,标记为蓝色。同理,回溯区块Y的未来区块发现9,10,11只能投票给Y,标记为红色。
未来区块12既回溯到X又能回溯到Y,它会投出与上一轮投票一样的结果X。图中虚线部分是上一轮的投票,按少数服从多数的原则可知,投票的结果是X。
X或Y之前产生的区块我们称为X或Y的过去区块,这些区块会分别统计自己对应的未来区块的投票,然后跟投给得票较多的那个选项。由此,区块1~5都投给X,交易x<y认定有效,y<x被丢弃。
2. “最长链共识”与SPECTRE的关系
图片2展示了当SPECTRE应用在区块链结构上的情况。
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章


















 2077
2077

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









