



一、简介
本模拟停车位管理系统的功能是:系统对进入停车位的车辆进行车牌识别,将识别出来的车牌号显示出来;然后对车主进行人脸识别,框出车主照片的人脸部分作为车主信息的标记,记录在系统库中。车辆在库期间,系统使用者可以随意查看车辆与车主信息的获取过程及获取结果。而当车辆离开时,系统库将清除该车辆与车主的所有信息。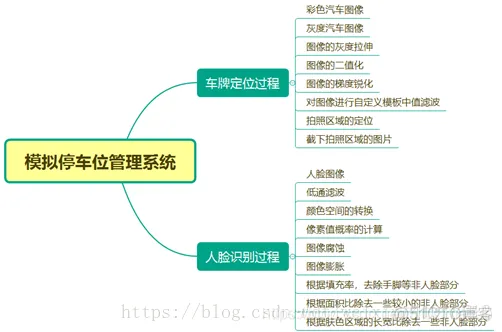
二、源代码
function varargout = slyarh_main(varargin)
gui_Singleton = 1;
gui_State = struct('gui_Name', mfilename, ...
'gui_Singleton', gui_Singleton, ...
'gui_OpeningFcn', @slyarh_main_OpeningFcn, ...
'gui_OutputFcn', @slyarh_main_OutputFcn, ...
'gui_LayoutFcn', [] , ...
'gui_Callback', []);
if nargin && ischar(varargin{1})
gui_State.gui_Callback = str2func(varargin{1});
end
if nargout
[varargout{1:nargout}] = gui_mainfcn(gui_State, varargin{:});
else
gui_mainfcn(gui_State, varargin{:});
end
function slyarh_main_OpeningFcn(hObject, eventdata, handles, varargin)
handles.output = hObject;
guidata(hObject, handles);
function varargout = slyarh_main_OutputFcn(hObject, eventdata, handles)
varargout{1} = handles.output;
%“※﹏﹋﹏﹋﹏﹋﹏﹋﹏﹋﹏﹋﹏﹋﹏﹋﹏ 启动画面 ﹏﹋﹏﹋﹏﹋﹏﹋﹏﹋﹏﹋﹏﹋﹏﹋﹏ ※”
ImageFile = '.\字符模板\wel.png';
ScreenSize = get(0,'ScreenSize');
jImage = im2java(imread(ImageFile));
jfBounds = num2cell([...
(ScreenSize(3)-jImage.getWidth)/2 ...
(ScreenSize(4)-jImage.getHeight)/2 ...
jImage.getWidth ...
jImage.getHeight]);
jFrame = javax.swing.JFrame;
icon = javax.swing.ImageIcon(jImage);
label = javax.swing.JLabel(icon);
jFrame.getContentPane.add(label);
jFrame.setUndecorated(true)
jFrame.setBounds(jfBounds{:});
jFrame.pack
jFrame.show
pause(3)
jFrame.dispose
%“※﹏﹋﹏﹋﹏﹋﹏﹋﹏﹋﹏﹋﹏﹋﹏﹋﹏ ﹏﹋﹏﹋﹏﹋﹏﹋﹏﹋﹏﹋﹏﹋﹏﹋﹏ ※”
%“※﹏﹋﹏﹋﹏﹋﹏﹋﹏﹋﹏﹋﹏﹋﹏﹋﹏ 背景和logo ﹏﹋﹏﹋﹏﹋﹏﹋﹏﹋﹏﹋﹏﹋﹏﹋﹏ ※”
h = handles.figure1; %创建一个Figure,并返回其句柄
newIcon = javax.swing.ImageIcon('.\字符模板\logo.png')
figFrame = get(h,'JavaFrame'); %取得Figure的JavaFrame。
figFrame.setFigureIcon(newIcon); %修改图标
ha=axes('units','normalized','pos',[0 0 1 1]);
uistack(ha,'down');
ii=imread('.\字符模板\bg1.png');
%设置程序的背景图为beijing1.jpg
image(ii);
colormap gray
set(ha,'handlevisibility','off','visible','off');
%“※﹏﹋﹏﹋﹏﹋﹏﹋﹏﹋﹏﹋﹏﹋﹏﹋﹏ ﹏﹋﹏﹋﹏﹋﹏﹋﹏﹋﹏﹋﹏﹋﹏﹋﹏ ※”
%“※﹏﹋﹏﹋﹏﹋﹏﹋﹏﹋﹏﹋﹏﹋﹏﹋﹏ 停车 ﹏﹋﹏﹋﹏﹋﹏﹋﹏﹋﹏﹋﹏﹋﹏﹋﹏ ※”
function bt_in_Callback(hObject, eventdata, handles)
[filename pathname]=uigetfile({'*.jpg';'*.png';'*.bmp'}, '正在拍摄入场的车辆~');
I=imread([pathname '\' filename]);
handles.I=I;
guidata(hObject, handles);
axes(handles.axes1);imshow(I);title('汽车靓照');
axes(handles.axes11);imshow(I);title('汽车靓照');
imwrite(I,'.\进车记录\原.jpg');
set(handles.bt_new,'visible','on');
set(handles.ui_in,'visible','off');
set(handles.ui_out,'visible','on');
%“※﹏﹋﹏﹋﹏﹋﹏﹋﹏﹋﹏﹋﹏﹋﹏﹋﹏ 进车 ﹏﹋﹏﹋﹏﹋﹏﹋﹏﹋﹏﹋﹏﹋﹏﹋﹏ ※”
I=handles.I;
I1=rgb2gray(I);
I2=edge(I1,'roberts',0.18,'both');
imwrite(I1,'.\进车记录\灰度.jpg');
imwrite(I2,'.\进车记录\边缘.jpg');
se=[1;1;1];
I3=imerode(I2,se);%腐蚀操作
imwrite(I2,'.\进车记录\腐蚀.jpg');
se=strel('rectangle',[25,25]);
I4=imclose(I3,se);%图像聚类,填充图像
I5=bwareaopen(I4,2000);%去除聚团灰度值小于2000的部分
[y,x,z]=size(I5);%返回15各维的尺寸,存储在x,y,z中
myI=double(I5);
tic %tic计时开始,toc结束
Blue_y=zeros(y,1);%产生一个y*1的零针
for i=1:y
for j=1:x
if(myI(i,j,1)==1)%如果myI图像坐标为(i,j)点值为1,即背景颜色为蓝色,blue加一
Blue_y(i,1)=Blue_y(i,1)+1;%蓝色像素点统计
end
end
end
[temp MaxY]=max(Blue_y);
%Y方向车牌区域确定
%temp为向量yellow_y的元素中的最大值,MaxY为该值得索引
PY1=MaxY;
while((Blue_y(PY1,1)>=5)&&(PY1>1))
PY1=PY1-1;
end
PY2=MaxY;
while((Blue_y(PY2,1)>=5)&&(PY2<y))
PY2=PY2+1;
end
IY=I(PY1:PY2,:,:);
%X方向车牌区域确定
Blue_x=zeros(1,x);%进一步确认x方向的车牌区域
for j=1:x
for i=PY1:PY2
if(myI(i,j,1)==1)
Blue_x(1,j)=Blue_x(1,j)+1;
end
end
end
PX1=1;
while((Blue_x(1,PX1)<3)&&(PX1<x))
PX1=PX1+1;
end
PX2=x;
while((Blue_x(1,PX2)<3)&&(PX2>PX1))
PX2=PX2-1;
end
PX1=PX1-1;%对车牌区域的矫正
PX2=PX2+1;
dw=I(PY1:PY2-8,PX1:PX2,:);
t=toc;
imwrite(dw,'.\进车记录\定位.jpg');
b=rgb2gray(dw);%将车牌图像转换为灰度图
g_max=double(max(max(b)));
g_min=double(min(min(b)));
T=round(g_max-(g_max-g_min)/3);%T为二值化的阈值
[m,n]=size(b);
d=(double(b)>=T);%d:二值图像
imwrite(d,'.\进车记录\二值.jpg');
% imwrite(d,'二值化.jpg');
%均值滤波前
%滤波
h=fspecial('average',3);
%建立预定义的滤波算子,average为均值滤波,模板尺寸为3*3
d=im2bw(round(filter2(h,d)));%使用指定的滤波器h对h进行d即均值滤波
imwrite(d,'.\进车记录\均值.jpg');
% imwrite(d,'均值滤波.jpg');
%某些图像进行操作
%膨胀或腐蚀
se=eye(2);%单位矩阵
[m,n]=size(d);%返回信息矩阵
if bwarea(d)/m/n>=0.365%计算二值图像中对象的总面积与整个面积的比是否大于0.365
d=imerode(d,se);%如果大于0.365则进行腐蚀
elseif bwarea(d)/m/n<=0.235%计算二值图像中对象的总面积与整个面积的比值是否小于0.235
d=imdilate(d,se);%%如果小于则实现膨胀操作
end
imwrite(I2,'.\进车记录\膨胀.jpg');
%寻找连续有文字的块,若长度大于某阈值,则认为该块有两个字符组成,需要分割
d=qiege(d);
[m,n]=size(d);
k1=1;
k2=1;
s=sum(d);
j=1;
while j~=n
while s(j)==0
j=j+1;
end
k1=j;
while s(j)~=0 && j<=n-1
j=j+1;
end
k2=j-1;
if k2-k1>=round(n/6.5)
[val,num]=min(sum(d(:,[k1+5:k2-5])));
d(:,k1+num+5)=0;%分割
end
end
%再切割
d=qiege(d);
%切割出7个字符
y1=10;
y2=0.25;
flag=0;
word1=[];
while flag==0
[m,n]=size(d);
left=1;
wide=0;
while sum(d(:,wide+1))~=0
wide=wide+1;
end
if wide<y1 %认为是左干扰
d(:,[1:wide])=0;
d=qiege(d);
else
temp=qiege(imcrop(d,[1 1 wide m]));
[m,n]=size(temp);
all=sum(sum(temp));
two_thirds=sum(sum(temp([round(m/3):2*round(m/3)],:)));
if two_thirds/all>y2
flag=1;word1=temp;%word1
end
d(:,[1:wide])=0;d=qiege(d);
end
end
%分割出第二至七个字符
[word2,d]=getword(d);
[word3,d]=getword(d);
[word4,d]=getword(d);
[word5,d]=getword(d);
[word6,d]=getword(d);
[word7,d]=getword(d);
[m,n]=size(word1);
%商用系统程序中归一化大小为40*20
word1=imresize(word1,[40 20]);
word2=imresize(word2,[40 20]);
word3=imresize(word3,[40 20]);
word4=imresize(word4,[40 20]);
word5=imresize(word5,[40 20]);
word6=imresize(word6,[40 20]);
word7=imresize(word7,[40 20]);
axes(handles.axes2);imshow(word1);
axes(handles.axes3);imshow(word2);
axes(handles.axes4);imshow(word3);
axes(handles.axes5);imshow(word4);
axes(handles.axes6);imshow(word5);
axes(handles.axes7);imshow(word6);
axes(handles.axes8);imshow(word7);
- 1.
- 2.
- 3.
- 4.
- 5.
- 6.
- 7.
- 8.
- 9.
- 10.
- 11.
- 12.
- 13.
- 14.
- 15.
- 16.
- 17.
- 18.
- 19.
- 20.
- 21.
- 22.
- 23.
- 24.
- 25.
- 26.
- 27.
- 28.
- 29.
- 30.
- 31.
- 32.
- 33.
- 34.
- 35.
- 36.
- 37.
- 38.
- 39.
- 40.
- 41.
- 42.
- 43.
- 44.
- 45.
- 46.
- 47.
- 48.
- 49.
- 50.
- 51.
- 52.
- 53.
- 54.
- 55.
- 56.
- 57.
- 58.
- 59.
- 60.
- 61.
- 62.
- 63.
- 64.
- 65.
- 66.
- 67.
- 68.
- 69.
- 70.
- 71.
- 72.
- 73.
- 74.
- 75.
- 76.
- 77.
- 78.
- 79.
- 80.
- 81.
- 82.
- 83.
- 84.
- 85.
- 86.
- 87.
- 88.
- 89.
- 90.
- 91.
- 92.
- 93.
- 94.
- 95.
- 96.
- 97.
- 98.
- 99.
- 100.
- 101.
- 102.
- 103.
- 104.
- 105.
- 106.
- 107.
- 108.
- 109.
- 110.
- 111.
- 112.
- 113.
- 114.
- 115.
- 116.
- 117.
- 118.
- 119.
- 120.
- 121.
- 122.
- 123.
- 124.
- 125.
- 126.
- 127.
- 128.
- 129.
- 130.
- 131.
- 132.
- 133.
- 134.
- 135.
- 136.
- 137.
- 138.
- 139.
- 140.
- 141.
- 142.
- 143.
- 144.
- 145.
- 146.
- 147.
- 148.
- 149.
- 150.
- 151.
- 152.
- 153.
- 154.
- 155.
- 156.
- 157.
- 158.
- 159.
- 160.
- 161.
- 162.
- 163.
- 164.
- 165.
- 166.
- 167.
- 168.
- 169.
- 170.
- 171.
- 172.
- 173.
- 174.
- 175.
- 176.
- 177.
- 178.
- 179.
- 180.
- 181.
- 182.
- 183.
- 184.
- 185.
- 186.
- 187.
- 188.
- 189.
- 190.
- 191.
- 192.
- 193.
- 194.
- 195.
- 196.
- 197.
- 198.
- 199.
- 200.
- 201.
- 202.
- 203.
- 204.
- 205.
- 206.
- 207.
- 208.
- 209.
- 210.
- 211.
- 212.
- 213.
- 214.
- 215.
- 216.
- 217.
- 218.
- 219.
- 220.
- 221.
- 222.
- 223.
三、运行结果



















 1038
1038

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









