



✅作者简介:热爱科研的Matlab仿真开发者,修心和技术同步精进,代码获取、论文复现及科研仿真合作可私信。
🍎个人主页:Matlab科研工作室
🍊个人信条:格物致知。
🔥 内容介绍
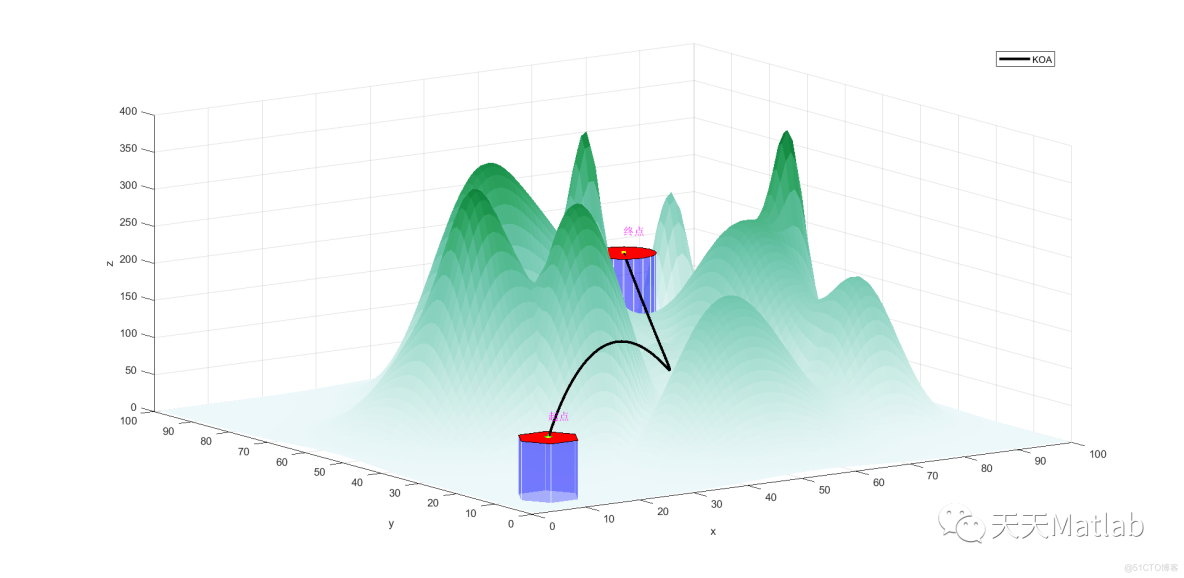
无人机技术在近年来得到了迅猛发展,其在农业、环境监测、物流配送等领域的应用越来越广泛。然而,由于山地环境的复杂性,无人机在此类地形中的路径规划问题变得尤为困难。为了解决这一问题,研究人员提出了基于开普勒优化算法(KOA)的无人机三维路径规划方法。
开普勒优化算法是一种新兴的启发式算法,其灵感来源于开普勒定律,能够有效地求解复杂的优化问题。通过将KOA应用于无人机路径规划中,研究人员希望能够克服传统算法在山地环境下的局限性,实现更高效、更安全的路径规划。
在这项研究中,研究人员首先对山地环境进行了详细的地形分析,包括地形高度、坡度、障碍物分布等信息。然后,他们将这些地形信息转化为数学模型,并结合无人机的动力学特性和航迹约束条件,建立了一个三维路径规划的优化问题。接下来,研究人员利用KOA算法对这一优化问题进行求解,得到了无人机在山地环境下的最优路径。
通过对比实验结果,研究人员发现基于KOA算法的无人机路径规划方法相较于传统算法具有更好的性能表现。在复杂的山地环境下,无人机能够更加高效地规避障碍物、避免陡峭的坡度,从而保证了飞行的安全性和稳定性。此外,KOA算法还能够在保证路径优化的同时,减少能源消耗,延长无人机的续航时间。
总的来说,基于开普勒优化算法的无人机三维路径规划研究为解决无人机在复杂山地环境中的路径规划问题提供了新的思路和方法。未来,研究人员还将继续深入探讨KOA算法在无人机领域的应用,进一步提升无人机在复杂环境下的飞行性能和应用价值。
📣 部分代码
%% 清空环境变量
warning off % 关闭报警信息
close all % 关闭开启的图窗
clear % 清空变量
clc % 清空命令行
%% 导入数据
res = xlsread('数据集.xlsx');
%% 划分训练集和测试集
temp = randperm(357);
P_train = res(temp(1: 240), 1: 12)';
T_train = res(temp(1: 240), 13)';
M = size(P_train, 2);
P_test = res(temp(241: end), 1: 12)';
T_test = res(temp(241: end), 13)';
N = size(P_test, 2);
%% 数据归一化
[p_train, ps_input] = mapminmax(P_train, 0, 1);
p_test = mapminmax('apply', P_test, ps_input);
t_train = ind2vec(T_train);
t_test = ind2vec(T_test );
⛳️ 运行结果
🔗 参考文献
本程序参考以下中文EI期刊,程序注释清晰,干货满满。
[1] 蔺文轩,谢文俊,张鹏,等.基于分组优化改进粒子群算法的无人机三维路径规划[J].火力与指挥控制, 2023, 48(1):20-25.
[2] 张涛,李少波,张安思,等.基于改进人工鱼群算法的复杂地貌无人机三维路径规划[J].科学技术与工程, 2023.
[3] 史志远.无人机三维路径规划与控制算法研究[J].[2023-12-07].


















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









