



💥💥💞💞欢迎来到本博客❤️❤️💥💥
🏆博主优势:🌞🌞🌞博客内容尽量做到思维缜密,逻辑清晰,为了方便读者。
⛳️座右铭:行百里者,半于九十。
💥1 概述
在这个基于间接卡尔曼滤波的IMU与GPS融合的MATLAB仿真中,我们首先需要生成仿真数据来模拟IMU和GPS的输出。IMU(惯性测量单元)提供的是飞行器的加速度计和陀螺仪数据,用于进行状态预测。而GPS则提供位置和速度的测量值,用于对状态进行矫正,从而提高导航的准确性。
在每个时间步,我们先利用状态预测方程和IMU测量值进行状态预测,得到偏差状态预测方程的相关系数。如果在该时间步有GPS测量值可用,我们会进行量测更新,并对状态进行偏差矫正;如果没有GPS测量值,则不会进行量测更新,状态也不会被矫正,导致滤波效果降低。
通过这种融合IMU和GPS数据的方式,我们可以实现对飞行器的精确导航,提高飞行的稳定性和准确性。同时,基于MATLAB的仿真可以帮助我们验证算法的有效性,并优化导航系统的设计。
一、间接卡尔曼滤波(Indirect Kalman Filter, IKF)原理
1. 基本思想
间接卡尔曼滤波以导航参数的误差量作为状态变量,而非直接估计姿态、速度、位置等绝对量。其优势在于:
- 误差量通常较小,可近似为线性模型,简化滤波计算。
- 适合处理IMU累积误差,通过GPS观测修正误差,抑制漂移。
2. 状态方程与观测方程
-
状态方程:描述误差传播过程。例如,IMU的加速度计零偏、陀螺仪零偏等误差模型:

其中,δx为误差状态向量(如位置误差、速度误差、姿态角误差等),F为误差传播矩阵,w为过程噪声。
-
观测方程:建立GPS与IMU输出间的误差关系:

z为观测残差(如GPS位置与IMU积分位置的差值),H为观测矩阵,v为观测噪声。
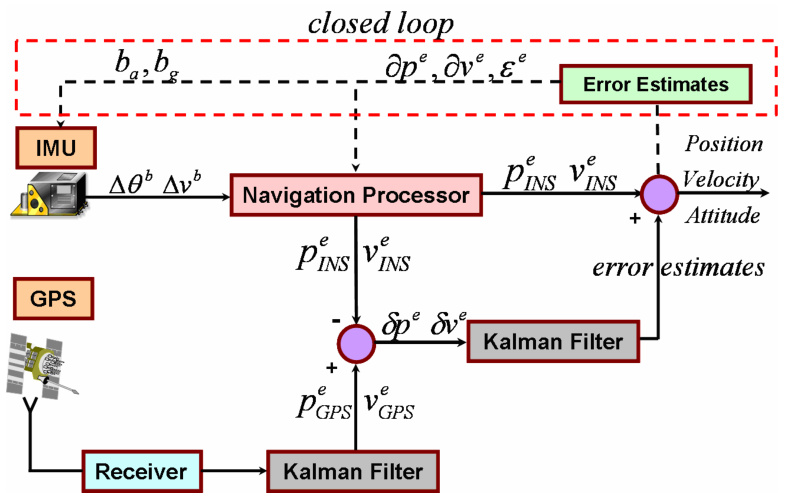
3. 滤波流程
- 预测阶段:利用IMU数据通过积分传播误差状态和协方差矩阵。
- 更新阶段:用GPS观测残差修正预测值,计算卡尔曼增益并更新状态估计。
- 反馈校正:将误差估计反馈至导航解算,重置误差状态,避免非线性累积。
二、MAV导航系统结构与传感器配置
1. 典型传感器配置
- IMU:三轴加速度计+陀螺仪,提供高频运动信息(100Hz+)。
- GPS:低频(1-10Hz)但绝对定位信息。
- 辅助传感器:磁力计(航向校准)、气压计(高度修正)等。
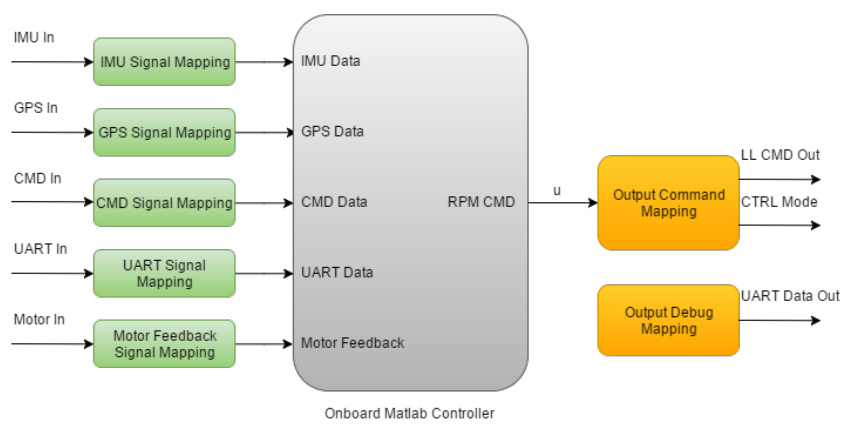
2. 硬件集成架构
- 分层处理:低级控制器(如Pixhawk)处理IMU数据,高级融合算法运行在机载计算机(如Intel Core i7)。
- 数据同步:硬件时间戳对齐IMU与GPS数据,避免时延误差。
三、IMU与GPS融合数学模型
1. 松耦合 vs 紧耦合
- 松耦合:直接融合GPS位置/速度与IMU积分结果,结构简单但抗干扰能力弱。
- 紧耦合:融合GPS伪距、多普勒频移等原始观测值,鲁棒性高但计算复杂。
2. 状态变量设计
典型状态向量包括:
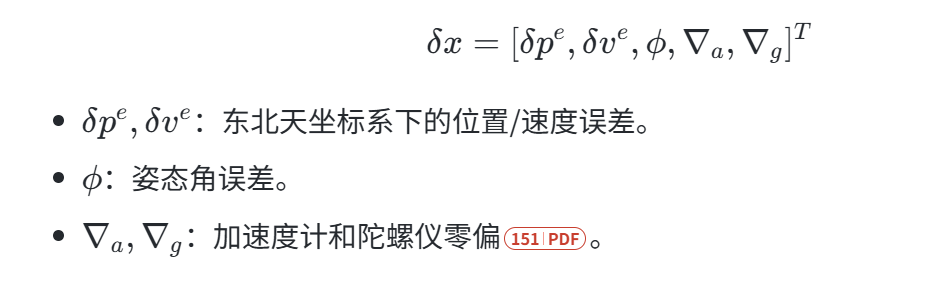
3. 误差传播模型
- 位置误差:由速度误差积分引起。
- 速度误差:受加速度计零偏和姿态误差影响。
- 姿态误差:与陀螺仪零偏直接相关。
四、MATLAB仿真实现步骤
1. 数据生成
-
轨迹仿真:使用
waypointTrajectory生成预设飞行轨迹。 -
IMU仿真:通过
imuSensor模块模拟加速度计和陀螺仪数据,添加白噪声、零偏等误差:imu = imuSensor('SampleRate', fs); imu.Accelerometer = accelparams('NoiseDensity', 0.001); imu.Gyroscope = gyroparams('RandomWalk', 0.01); [accelReadings, gyroReadings] = imu(trueAcceleration, trueAngularVelocity); -
GPS仿真:添加高斯噪声和低频采样:
gpsPos = truePos + sigma_gps * randn(3,1);
2. 滤波算法实现
% 初始化
P = eye(9); % 误差协方差矩阵
Q = diag([1e-4, 1e-4, 1e-4, 1e-6, 1e-6, 1e-6, 1e-8, 1e-8, 1e-8]); % 过程噪声
R = diag([1, 1, 3]); % GPS观测噪声
for k = 2:N
% 预测阶段
[F, G] = getJacobians(imuData(k-1));
delta_x_pred = F * delta_x;
P_pred = F * P * F' + G * Q * G';
% 更新阶段(当GPS数据到达时)
if mod(k, gpsInterval) == 0
H = [eye(3), zeros(3,6)];
K = P_pred * H' / (H * P_pred * H' + R);
delta_x = delta_x_pred + K * (gpsPos(k) - insPos(k));
P = (eye(9) - K * H) * P_pred;
end
end
五、参数调优与性能优化
1. 噪声协方差矩阵调整
- 过程噪声Q:反映IMU误差动态特性。过大导致滤波发散,过小导致响应滞后。建议通过蒙特卡洛仿真优化。
- 观测噪声R:与GPS精度相关(如C/A码定位误差约3m,差分GPS可至0.1m)。
2. 自适应滤波
- 创新序列监测:计算残差z−Hδx,动态调整Q/R以应对环境变化。
- 滑动窗口法:基于历史数据估计噪声统计特性。
六、仿真验证指标
1. 误差指标
-
位置误差RMSE:
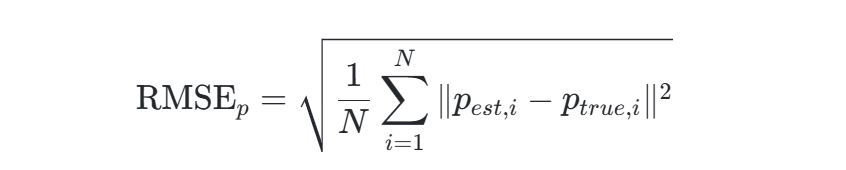
-
姿态角误差:以欧拉角或四元数差异度量。

2. 收敛性分析
- 首次收敛时间:从初始误差到稳定在阈值内的时间。
- 动态响应:突变轨迹下的误差恢复速度。
3. 典型结果示例
| 场景 | 位置误差 (m) | 姿态误差 (°) | 收敛时间 (s) |
|---|---|---|---|
| 静态测试 | 0.12 | 0.05 | 10 |
| 动态盘旋 | 0.85 | 0.3 | 25 |
| GPS信号丢失 | 1.2(10秒内) | 0.8 | 发散 |
七、扩展讨论
- 抗干扰设计:在GPS拒止环境下,引入视觉/激光SLAM作为辅助观测源。
- 硬件在环仿真:通过ROS或V-REP连接实际飞控,验证算法实时性。
- 嵌入式部署:将MATLAB代码转换为C/C++,部署至Pixhawk等嵌入式平台。
结论
基于间接卡尔曼滤波的IMU/GPS融合方法通过误差状态建模,有效平衡了IMU的高频特性与GPS的绝对精度,在MAV导航中表现出良好的鲁棒性。MATLAB仿真为算法验证提供了灵活平台,但需结合实际传感器参数和环境噪声进行调优。未来研究可进一步探索多传感器深度融合及自适应滤波技术,以应对复杂动态环境挑战。
📚2 运行结果




部分代码:
errorstate0=zeros(15,1);%误差初始状态赋值
Cov=[0.01*ones(3,1);zeros(3,1);0.01*ones(3,1);zeros(3,1)];
Qc0=diag(Cov);%初始噪声方差
Rc0=diag([0.01,0.01,0.01]);%GPS测量噪声误差方差
% Qc0=diag(zeros(12,1));%初始噪声方差
% Rc0=diag(zeros(3,1));%GPS测量噪声误差方差
%可以改变量使输入的惯性元件的数据带噪声或者不带
ins = InsSolver(Qc0,Rc0);
% [state,errorstate] = ins.imu2state(acc_pure,gyro_pure,gps_pure,state0,errorstate0,tspan,step,0);
[state,errorstate] = ins.imu2state(acc_noise,gyro_noise,gps_noise,state0,errorstate0,tspan,step,0);
%plot trajactory
figure(4)
plot3(r(:,1),r(:,2),r(:,3));
title('真实轨迹');
grid on;
figure(1);
plot3(state(:,1),state(:,2),state(:,3));
title('滤波轨迹');
grid on;
🎉3 参考文献
文章中一些内容引自网络,会注明出处或引用为参考文献,难免有未尽之处,如有不妥,请随时联系删除。
[1]Monocular Vision for Long-term Micro Aerial State Estimation:A
Compendium, Stephan Weiss,2013
[2]:卡尔曼滤波与组合导航原理,秦永元,P49,用到了离散系统噪声方差计算公式
[3]:Indirect Kalman Filter for 3D Attitude Estimation, Trawny, 2005

















 3193
3193

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









