 MATLAB实现杜宾斯快速扩展随机树算法
MATLAB实现杜宾斯快速扩展随机树算法




💥💥💞💞欢迎来到本博客❤️❤️💥💥
🏆博主优势:🌞🌞🌞博客内容尽量做到思维缜密,逻辑清晰,为了方便读者。
⛳️座右铭:行百里者,半于九十。
📋📋📋本文目录如下:🎁🎁🎁
目录
💥1 概述
基本概念
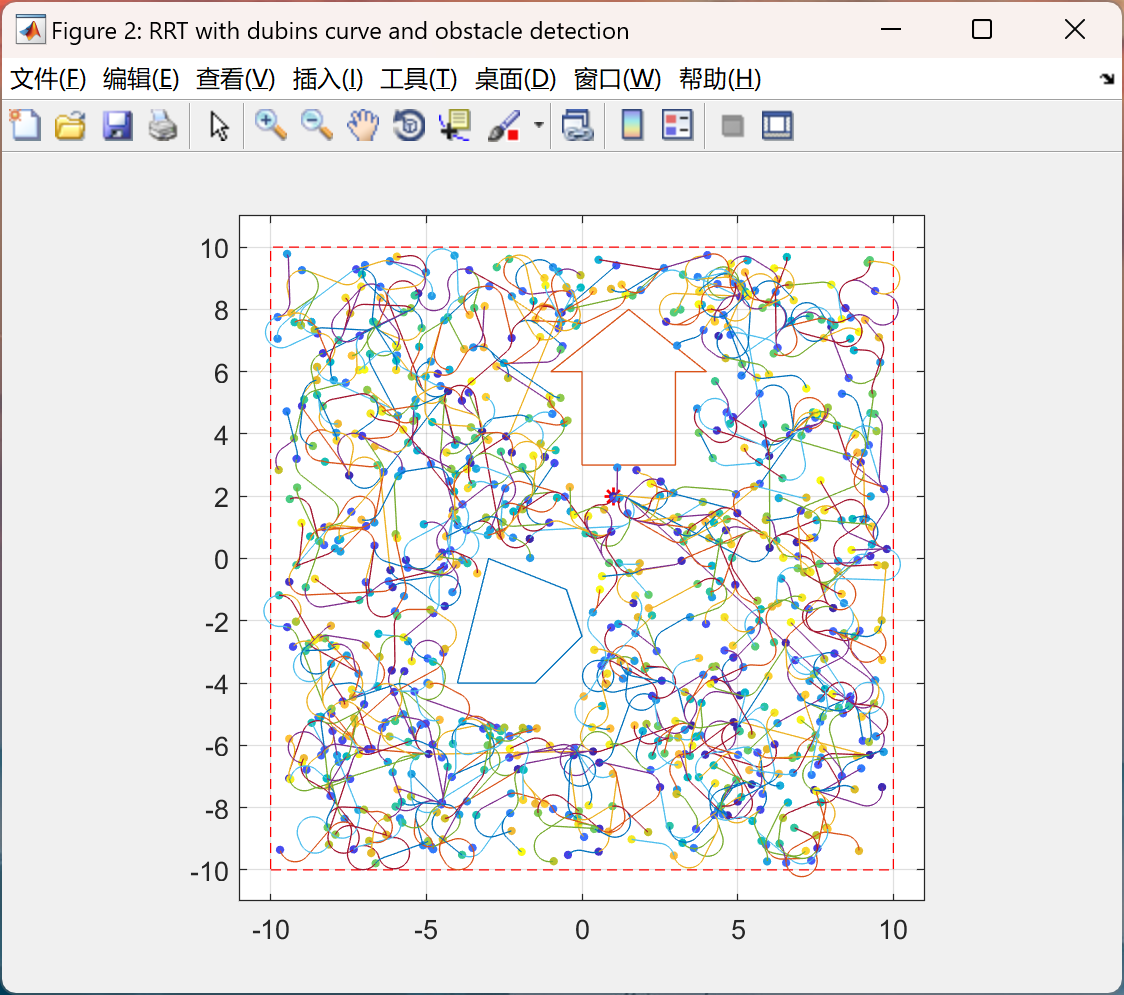
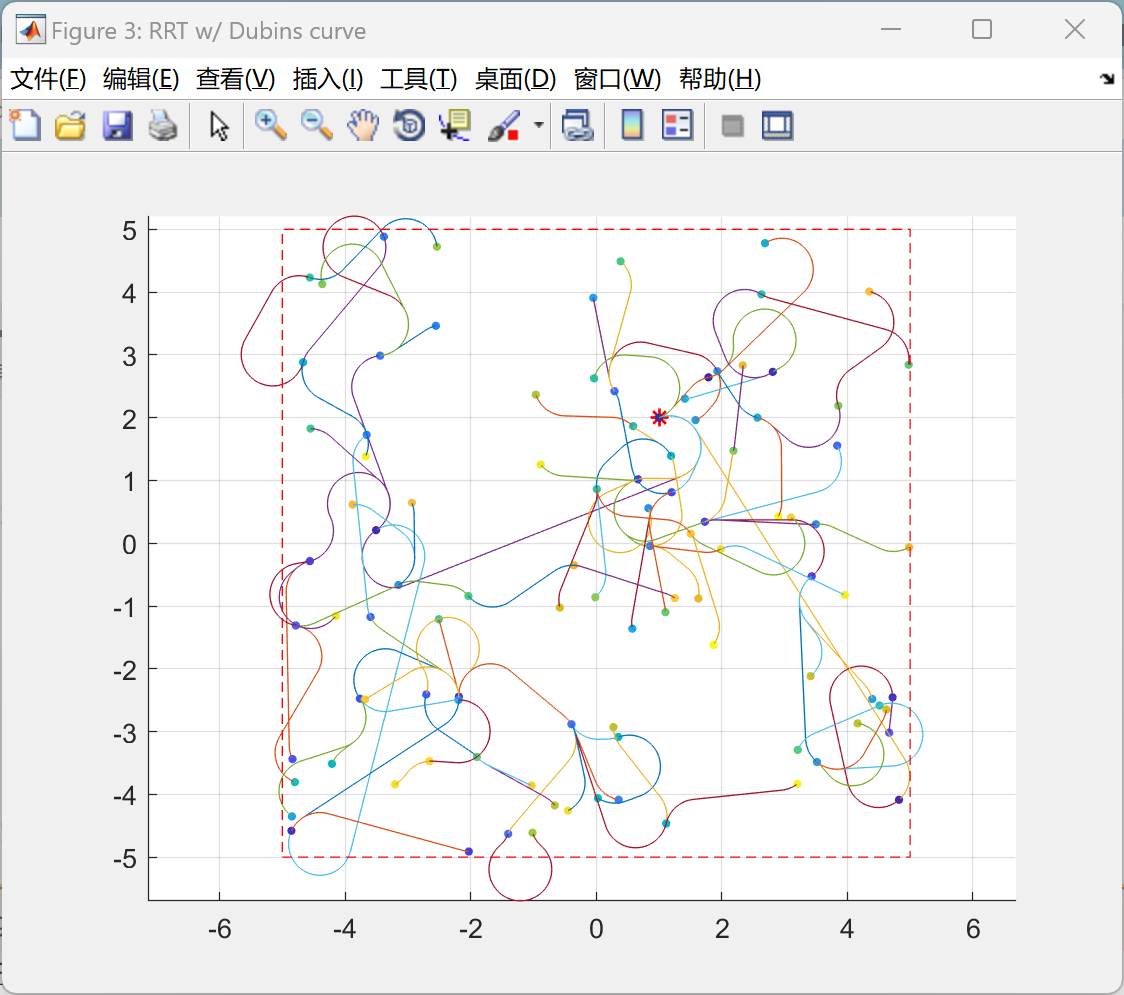
快速扩展随机树(RRT)是一种在路径规划领域应用广泛的算法。它基于随机采样的思想,通过不断在空间中扩展树结构来探索环境,逐步构建出从起始点到目标点的可行路径。而杜宾斯快速扩展随机树(Dubins-RRT)则是在常规RRT的基础上,融入了杜宾斯曲线(Dubins Curves)相关理论。杜宾斯曲线是用于描述在特定约束(比如车辆等具有最小转弯半径限制的运动体)下,从一个初始状态到另一个状态的最短路径曲线形式,通常应用于移动机器人、自动驾驶车辆等领域的路径规划中。
在MATLAB中的实现意义 MATLAB作为一款功能强大的科学计算和编程软件,有着丰富的数学函数库、可视化工具以及易于上手的编程环境。将Dubins-RRT算法在MATLAB中实现,可以充分利用这些优势。比如利用其矩阵运算能力高效地处理坐标、状态等数据的计算;借助可视化功能直观地展示随机树的扩展过程、生成的路径以及环境中的障碍物等情况,方便开发者调试算法、分析路径规划效果。并且对于科研人员来说,能便捷地基于MATLAB平台进行相关算法改进、性能对比等研究工作,对于实际工程应用中涉及到路径规划的项目,也可以通过MATLAB快速进行方案验证和原型开发。
主要功能与应用场景
功能方面: 环境建模与探索:能够依据设定的地图范围、障碍物信息等构建相应的环境模型,在这个环境中不断通过随机采样点扩展树结构,逐渐探索出可达的空间区域,找到可能通向目标的分支。
路径生成:结合杜宾斯曲线的特点,为具有运动学约束的物体规划出符合其转弯半径等限制条件的、相对优化的路径,确保生成的路径在实际中是可执行的。路径优化与调整:可以根据一定的优化准则,比如路径长度最短、经过的危险区域最少等,对初步生成的路径进行进一步优化,同时也能在遇到动态障碍物等情况时,实时调整已规划好的路径。
应用场景:机器人领域:无论是室内服务机器人在房间内导航,还是工业机器人在车间复杂环境中移动执行任务,Dubins-RRT都可以为其规划出合理的运动路径,避免碰撞障碍物,提高工作效率。 自动驾驶车辆:考虑到车辆本身不能随意转弯,存在最小转弯半径的限制,该算法可帮助自动驾驶汽车在城市道路、停车场等场景下规划行驶路径,实现安全、高效地从起点驶向目的地。 无人机飞行路径规划:针对无人机有限的机动性能,规划出符合其飞行特性的轨迹,使其能顺利绕过禁飞区等障碍区域,完成诸如航拍、物资运输等任务。
算法的优势与局限性
优势: 对复杂环境适应性较好:由于采用随机采样扩展树的方式,对于形状不规则、存在大量障碍物的复杂环境,有较大概率能探索到可行的路径,不需要对整个环境进行精确的、事先的数学建模。 计算效率相对可观:相较于一些穷举式的路径规划算法,它通过有针对性地随机采样和逐步扩展,在很多情况下能较快地找到一条可用路径,尤其是在高维空间中也能展现出一定的效率优势。 考虑运动学约束:结合杜宾斯曲线融入运动学约束条件,使规划出的路径贴合实际物体的运动能力,避免规划出不符合实际执行情况的路径。
局限性: 路径最优性不能完全保证:虽然可以进行一定程度的优化,但基于随机采样的本质,不能确保每次得到的路径都是全局最优的,可能存在更短或者性能更好的路径未被探索到。依赖参数设置:像采样范围、扩展步长、树的生长概率等参数对算法的性能和最终路径结果影响较大,不合适的参数设置可能导致算法收敛过慢甚至找不到可行路径,需要一定的经验和反复试验来确定合适参数。 在动态环境实时性挑战:面对动态变化频繁的环境,比如快速移动的障碍物等情况,算法的实时更新和重新规划路径的能力存在一定局限,可能无法及时响应环境变化而导致路径失效。 总之,用于MATLAB的杜宾斯快速扩展随机树是一种在路径规划领域很有价值的工具,虽然存在一些局限性,但在很多实际应用场景中都能发挥重要作用,并且随着相关研究的不断深入,其性能也有望进一步提升。
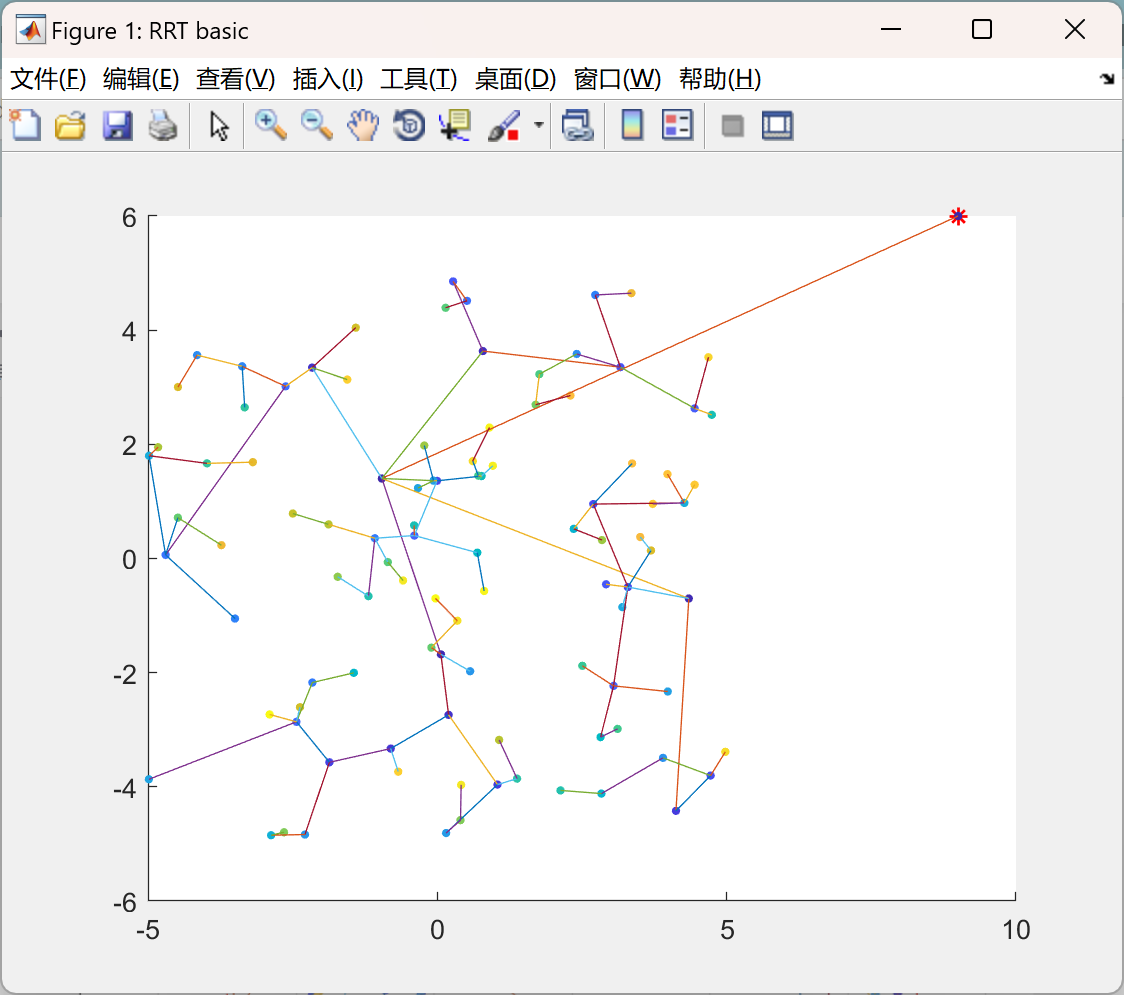
📚2 运行结果
主函数部分代码:
close(findobj('type','figure','name','RRT basic'));
close(findobj('type','figure','name','RRT growing'));
%%%%%%%%%%%%%%%%%%%% User Configuration Area %%%%%%%%%%%%%%%%%%%%
% define the map
height = 20;
width = 20;
center = [0, 0];
% starting vertex
origin = [1,0];
iterations = 1000;
% define the obstacles using polygones, should be a cell stack of arrays.
poly = { [-4,-4; -1.5, -4; 0, -2.5; -0.5, -1; -3, 0],...
[0,3; 3,3; 3, 6; 4, 6; 1.5, 8; -1, 6; 0, 6] };
%%%%%%%%%%%%%%%%%%%% End of configuration area %%%%%%%%%%%%%%%%%%%%
offset = center - [width, height]./2;
vertecies = origin;
vert_count = 1;
edges.x = zeros(iterations,2);
edges.y = zeros(iterations,2);
ind_nearest = zeros(iterations,1);
edge_count = 0;
% figure('name', 'RRT growing'); % originally for real-time animation
tic;
for i=1:iterations
% random point generation
x_rand = width*rand() + offset(1);
y_rand = height*rand() + offset(2);
% connect to nearest point
ind_nearest(i) = dsearchn(vertecies, [x_rand, y_rand]);
edge_rand = [x_rand, y_rand ; vertecies(ind_nearest(i),:)];
% check availablility
if chk_collision(edge_rand,poly) == 0
% connect and add to list
vertecies(vert_count+1,:) = [x_rand, y_rand];
vert_count = vert_count + 1;
edges.x(edge_count+1,:) = [vertecies(ind_nearest(i),1), x_rand];
edges.y(edge_count+1,:) = [vertecies(ind_nearest(i),2), y_rand];
edge_count = edge_count + 1;
else
%i = i - 1; % doesn't work under MATLAB
end
% plot animation here is undoable probably due to MATLAB running
% optimization...
% scatter(x_rand, y_rand, 10,'filled'); hold on;
% plot([vertecies(ind_nearest(i),1); x_rand], [vertecies(ind_nearest(i),2); y_rand]); hold on;
end
toc;
clear i x_rand y_rand edge_rand
figure('name', 'RRT basic');
scatter(origin(1), origin(2), 45, '*','r','LineWidth',1); hold on;
scatter(vertecies(:,1), vertecies(:,2), 10,linspace(1,10,length(vertecies(:,1))),'filled'); hold on;
plot(edges.x', edges.y'); hold on;
🎉3 参考文献
文章中一些内容引自网络,会注明出处或引用为参考文献,难免有未尽之处,如有不妥,请随时联系删除。
[1]周畅,于特,刘佳鹏,等.基于快速随机搜索树*与凸优化的船舶路径规划与跟踪算法[J/OL].中国舰船研究,1-16[2024-12-17].https://doi.org/10.19693/j.issn.1673-3185.03837.
[2]王发麟,郭耀文,龚建华.基于改进快速搜索随机树算法的复杂机电产品线缆装配路径求解[J].计算机辅助设计与图形学学报,2024,36(08):1298-1310.
🌈4 Matlab代码实现


















 1703
1703

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









