



 本文探讨了无人机如何运用分布式控制算法进行潜伏猎杀地面目标的研究,涉及传感器技术、目标识别及飞行路径规划,并通过Matlab代码展示了势场函数的实现。
本文探讨了无人机如何运用分布式控制算法进行潜伏猎杀地面目标的研究,涉及传感器技术、目标识别及飞行路径规划,并通过Matlab代码展示了势场函数的实现。
💥💥💞💞欢迎来到本博客❤️❤️💥💥
🏆博主优势:🌞🌞🌞博客内容尽量做到思维缜密,逻辑清晰,为了方便读者。
⛳️座右铭:行百里者,半于九十。
📋📋📋本文目录如下:🎁🎁🎁
目录
💥1 概述
无人机和优格伏-无人机是现代军事和民用领域的重要技术应用之一,它们能够在无人驾驶的情况下执行各种任务,包括监视、侦察、交付货物以及潜伏猎杀地面目标等。首先,分布式控制算法是指通过多个无人机之间的协同合作来实现任务的完成。这种算法允许无人机之间进行信息交换和协调,以实现更高效、更灵活的任务执行。在这个研究中,分布式控制算法将起到关键作用,确保无人机能够以集体的方式执行潜伏猎杀地面目标的任务,同时保持良好的协调和合作。其次,潜伏猎杀地面目标的研究涉及到无人机如何在不被察觉的情况下发现、跟踪和击杀地面目标。这可能涉及到传感器技术、目标识别算法、飞行路径规划以及武器系统的集成等方面。该研究的目标是设计一种高效、隐蔽的方式,使无人机能够在敌方地面目标周围进行监视和攻击,同时尽量减少被敌方察觉的可能性。这项研究旨在结合分布式控制算法和潜伏猎杀地面目标的技术,实现无人机在无人驾驶情况下执行任务的高效性和隐蔽性。通过合理的算法设计和技术应用,可以提高无人机在军事和民用领域的实用性和适用性。
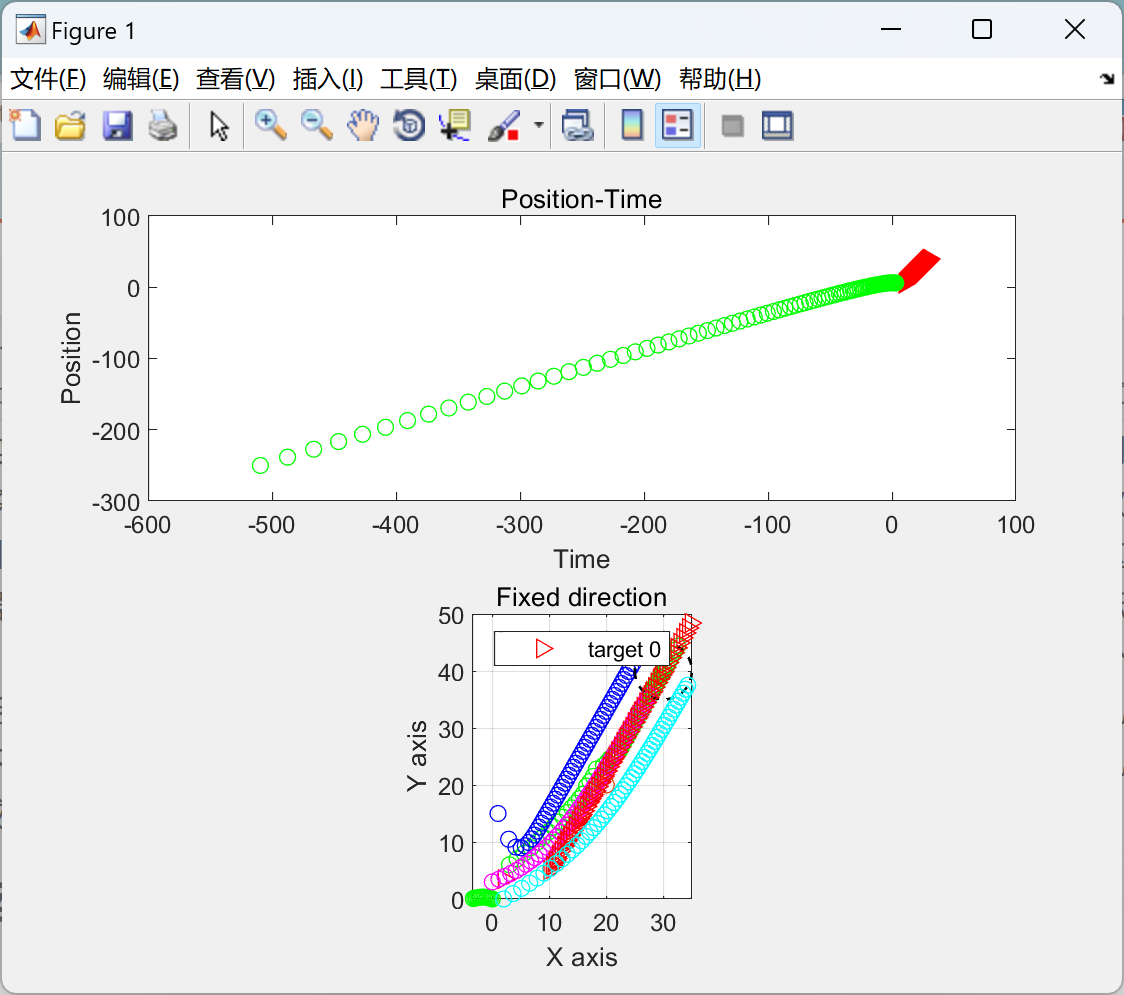
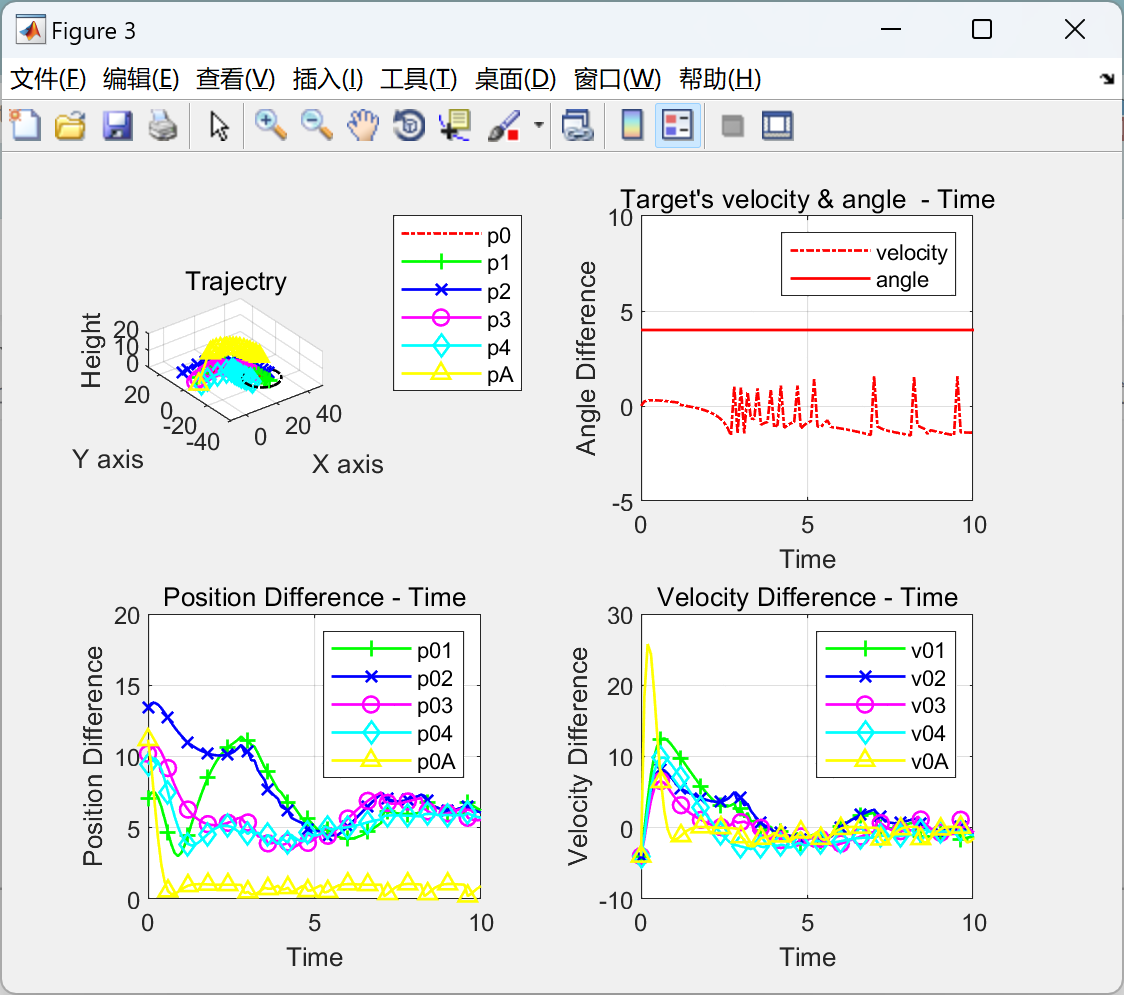
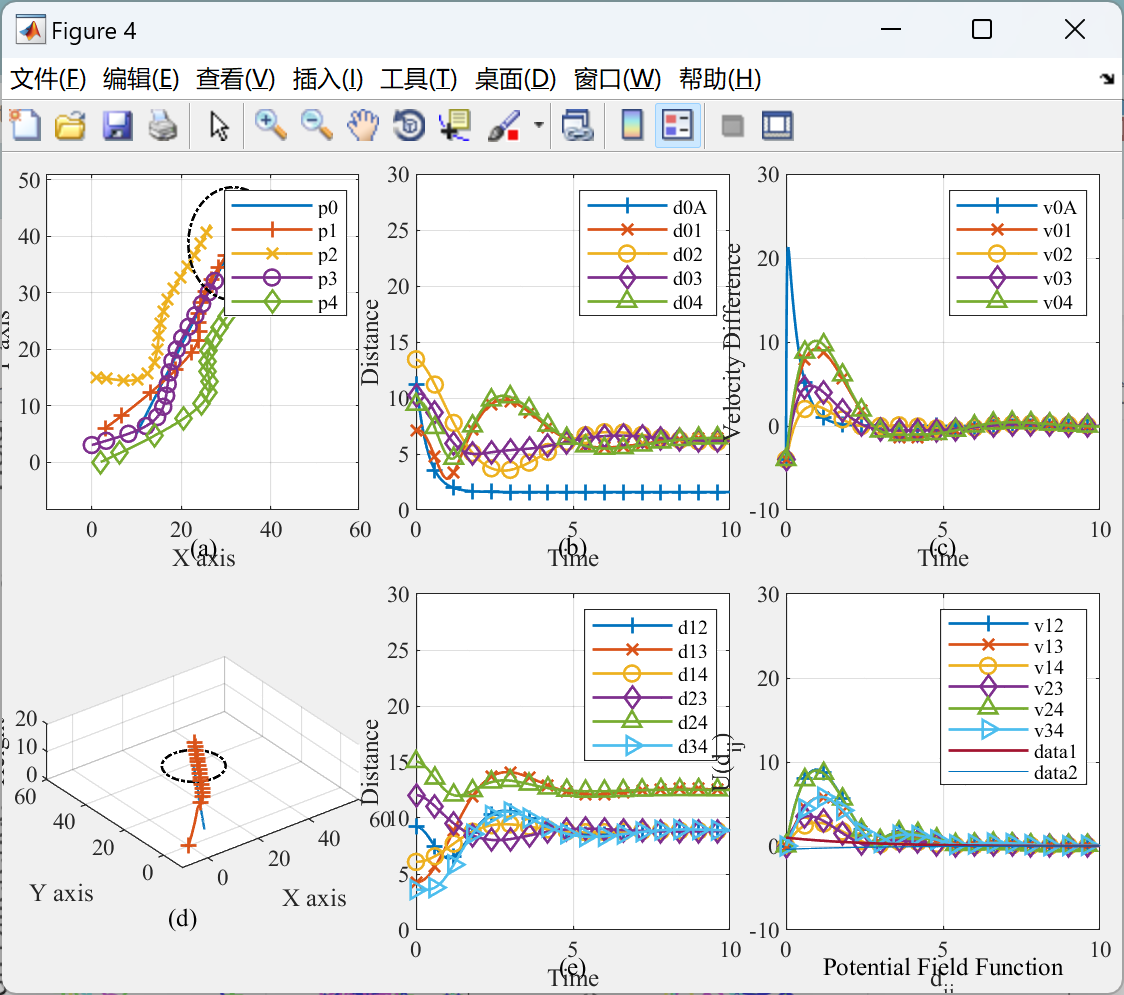
📚2 运行结果
部分代码:
% 人工势场函数
clear
clc
% 自变量:距离
% 参数:影响距离
% 期望距离:d
% 有效距离:R
% 当前距离:dij
% syms d R dij real
% Vij = (dij - d)^2 * (R - dij) / ( dij + d^2 * (R-dij) )...
% + (dij - d)^2 * (dij) / ( (R - dij) + dij * (R-d)^2 );
d = 10;
R = 0;
xi = 1;
rho = 10;
ij = linspace(0,10,100); % 距离
for time = 1:length(ij)
dij = ij(1,time);
Vij(1,time) = (dij - d)^2 * (R - dij) / ( dij + d^2 * (R-dij) )...
+ (dij - d)^2 * (dij) / ( (R - dij) + dij * (R-d)^2 );
VFij(1,time) = (2*dij*(2*d - 2*dij))/(- dij*d^2 + dij) - (2*(d - dij)^2)/(- dij*d^2 + dij) - (2*dij*(d^2 - 1)*(d - dij)^2)/(dij - d^2*dij)^2;
% 用这一套了,不再改了
Vij(1,time) = (dij-d)^2 / (dij+d)^2 ;
VFij(1,time) = (- (2*d - 2*dij)/(d + dij)^2 - (2*(d - dij)^2)/(d + dij)^3);
Tij(1,time) = (1/dij - 1/rho)^2;
TFij(1,time) = -( xi * (1/dij - 1/rho))/dij^2;
V2ij(1,time) = 1/(dij^2) + 1/(1^2-dij^2);
V2Fij(1,time) = (2*dij)/(R^2 - dij^2)^2 - 2/dij^3;
VLij(1,time) = ( min(0,(dij^2-R^2)/(dij^2-d^2)) )^2;
VLFij(1,time) = (4*dij*(R^2 - dij^2)^2)/(d^2 - dij^2)^3 - (4*dij*(R^2 - dij^2))/(d^2 - dij^2)^2;
end
% syms xi dij rho real
% Tij = 0.5 * xi * (1/dij - 1/rho)^2;
% 传统的斥力算法
% Tij = 0.5 * xi * (1/dij - 1/rho)^2;
% TFij = -( xi * (1/dij - 1/rho))/dij^2;
% 因为势场函数是根据两个目标的距离作为自变量的
% 因此需要先计算出来距离,之后代入势场,然后再计算产生的控制力
huitu = 1;
if huitu == 1
plot(ij,Vij,'linewidth',1);
xlabel('d_{ij}');
ylabel('U(d_{ij})');
title('Potential Field Function');
plot(ij,VFij); hold on
% plot(ij,Tij); hold on
% plot(ij,TFij); hold on
% plot(ij,V2ij); hold on
% plot(ij,V2Fij); hold on
% plot(ij,VLij); hold on
% plot(ij,VLFij); hold on
end
do = 5;
maxF = 10;
x = linspace(0,10,100);
🎉3 参考文献
文章中一些内容引自网络,会注明出处或引用为参考文献,难免有未尽之处,如有不妥,请随时联系删除。
[1]亓慧敏,陈昂,杨秀春.基于无人机高光谱的内蒙古天然牧草氮磷钾含量的反演[J/OL].草地学报:1-18[2024-04-18].http://kns.cnki.net/kcms/detail/11.3362.s.20240416.1614.004.html.
[2]王晓璐,刘威威,周冲,等.垂直起降无人机气动布局设计研究进展[J].郑州航空工业管理学院学报,2024,42(02):25-32.DOI:10.19327/j.cnki.zuaxb.1007-9734.2024.02.004.

















 859
859

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









