




在信息技术飞速发展的时代,数据规模的指数级增长成为数据管理领域不可忽视的挑战。尤其是地理信息系统(GIS)、建筑信息建模(BIM)、虚拟现实(VR)等领域的大规模空间数据,其高维度与复杂性远超传统数据。这使得高效检索和存储成为关键问题。
传统的数据库索引结构(如B树、哈希表)无法满足空间数据的复杂查询需求,因此催生了空间索引这一关键技术。空间索引不仅通过优化数据存储结构提升查询效率,还为空间数据的分析、计算提供了强有力的支持。

一、 空间索引的定义与特点
#空间索引的定义
空间索引是一种专门为管理空间数据(如点、线、面或体等几何对象)而设计的数据结构。它通过对空间数据进行划分、组织和索引,加速空间范围查询、邻近查询、最近邻搜索等操作。空间索引不仅记录数据的属性,还存储数据在空间中的位置及其几何特性。

图源:百度
#空间索引的特点
与传统索引相比,空间索引具有以下显著特点:
- 多维性:传统索引通常用于一维数据(如数值、文本等),而空间索引需管理多维数据,如二维平面或三维立体空间。
- 几何复杂性:空间索引不仅需要记录对象的位置,还需处理复杂的几何关系(如包含、相交、邻接等)。
- 动态性:许多空间数据应用场景(如游戏、仿真)要求索引能够实时更新,适应动态变化的空间数据。
二、 为什么需要空间索引
#海量数据的管理需求
现代技术生成的空间数据规模庞大,例如城市三维建模、LIDAR扫描、卫星遥感影像等。这些数据动辄达到数十亿甚至数千亿条,如果没有高效的索引机制,逐一扫描所有数据进行查询将耗费极大的时间和计算资源。
空间索引通过构建层次结构或划分空间,大幅缩小检索范围,提升了查询效率。
#提升查询效率
空间索引的核心优势在于其能够显著加快查询速度。典型的空间查询包括:
- 范围查询:检索指定空间范围内的所有对象,例如查询某个城市区域内的建筑物。
- 邻近查询:查找某个点或对象附近的其他对象,例如在导航系统中查询最近的加油站。
- 最近邻搜索(k-NN查询):查找距离最近的k个对象,例如查找某点附近最近的餐馆或医院。
通过空间索引,这些查询操作的时间复杂度可以从线性复杂度(O(n))降至对数或更低(O(log n))。
#满足多种空间应用场景
空间索引广泛应用于诸多领域:
- GIS与遥感:空间索引用于高效检索地理实体或地理区域。
- BIM与建筑规划:索引结构帮助快速定位特定的建筑部件或区域。
- 无人驾驶与机器人导航:实时路径规划与障碍物检测需要快速定位空间对象。

图源:百度
三、常见的空间索引方法
#R树及其变体
R树是最经典的空间索引结构之一。它利用最小边界矩形(MBR)来表示数据对象,将空间数据递归地组织成树状结构。其变体包括:
- R*树:在查询操作中,MBR之间的重叠减少后,树的访问路径更加集中,从而提升查询效率。在大多数应用场景(特别是范围查询)中,性能优于标准R树。
- R+树:查询时,访问的节点数量更少,特别是点查询(Point Query)和等值查询中性能更高。对于精确检索的场景(如GIS中的点定位)表现优异。

一个R树实例
#四叉树与八叉树
四叉树用于二维空间,八叉树用于三维空间,通过递归地将空间划分为四或八个子区域进行管理。它们适用于点云数据、三维模型等的快速空间划分。


四叉树与八叉树
#K-D树
K-D树是一种k维空间的索引结构,通常用于最近邻搜索。它通过按维度递归划分空间,能够高效地处理低维空间数据。
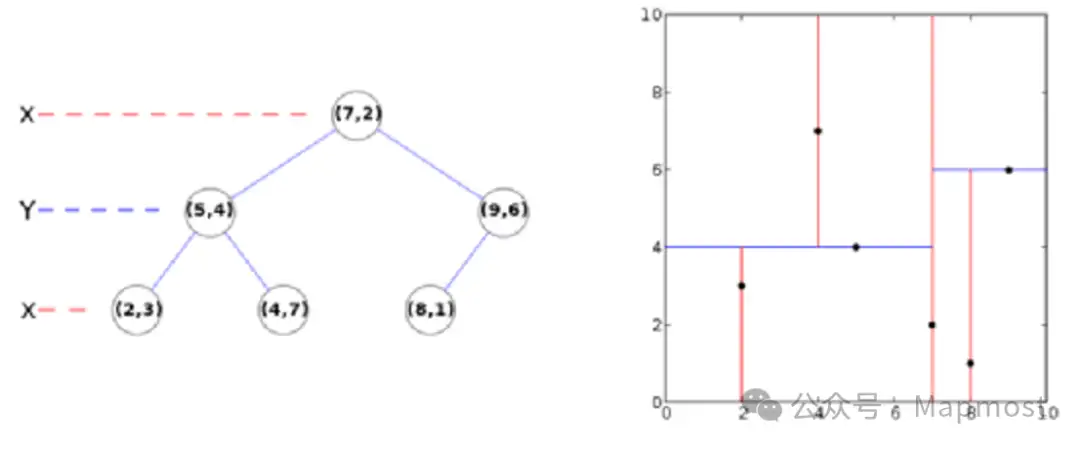
一个K-D树实例
四、空间索引的挑战与发展趋势
#挑战
- 高维数据管理:随着应用复杂度增加,高维空间数据(如4D、5D)索引的设计难度加大。
- 动态数据的实时更新:许多应用场景(如游戏、实时监控)要求索引能够实时更新,这对传统索引结构提出了更高的要求。
#发展趋势
未来空间索引的发展趋势包括:
- 并行化与分布式:在云计算与大数据环境下,空间索引需要支持并行与分布式计算。
- 机器学习与智能优化:利用机器学习优化索引结构,提高检索效率。
- GPU加速:利用GPU的强大计算能力,加速空间索引的构建与查询过程。
空间索引作为大规模空间数据管理的核心技术,极大地提升了数据检索与处理效率。在未来,随着空间数据规模的持续增长与应用场景的不断丰富,空间索引将继续发挥重要作用,并在高维索引、动态更新、并行计算等方面迎来新的突破。
关注 Mapmost,持续更新 GIS、三维美术、计算机技术干货
Mapmost 是一套以三维地图和时空计算为特色的数字孪生底座平台,包含了空间数据管理工具(Studio)、应用开发工具(SDK)、应用创作工具(Alpha)。平台能力已覆盖城市时空数据的集成、多源数据资源的发布管理,以及数字孪生应用开发工具链,满足企业开发者用户快速搭建数字孪生场景的切实需求,助力实现行业领先。

















 1264
1264

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









