






 本文深入解析了Shell的概念,从狭义的命令行界面到广义的图形界面应用,并详细介绍了常用的Shell命令,如type、echo、export等,以及变量操作、测试和替换方法,适合初学者和进阶用户学习。
本文深入解析了Shell的概念,从狭义的命令行界面到广义的图形界面应用,并详细介绍了常用的Shell命令,如type、echo、export等,以及变量操作、测试和替换方法,适合初学者和进阶用户学习。
硬件,内核与shell
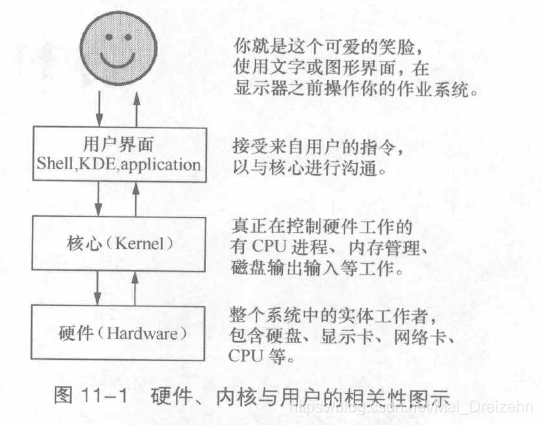
只要能够操作应用程序的接口都能称为shell。侠义的shell指的是命令行方面的软件,包括bash。广义的shell则包括图像界面的软件,因为图形界面其实也能够操作各种应用程序来调用内核工作。
常用命令
type:查看这个命令是来自于外部命令或是内置在bash
echo:显示变量(变量之前加上“$")或者是${变量}
export:若该变量需要在其他子进程执行,则需要以export来使变量变成环境变量
env/export:查看环境变量与常见环境变量说明
set:查看所有变量(含环境变量与自定义变量)
read:读取来自键盘输入的变量
declare/typeset:声明变量的类型
ulimit:设置与文件系统及程序的限制关系
变量内容的删除、替代与替换
path=${PATH}
echo $path
echo ${path#/*kerberos/bin:}
echo ${path##/*:}
----------------------------------------------------
#,代表变量内容的最前面开始向右删除,且仅删除最短的那个
*,通配符,替代0到无穷多个任意字符
##,删除最长的那个
echo ${path%:*bin}
%,从后向前删除

替换

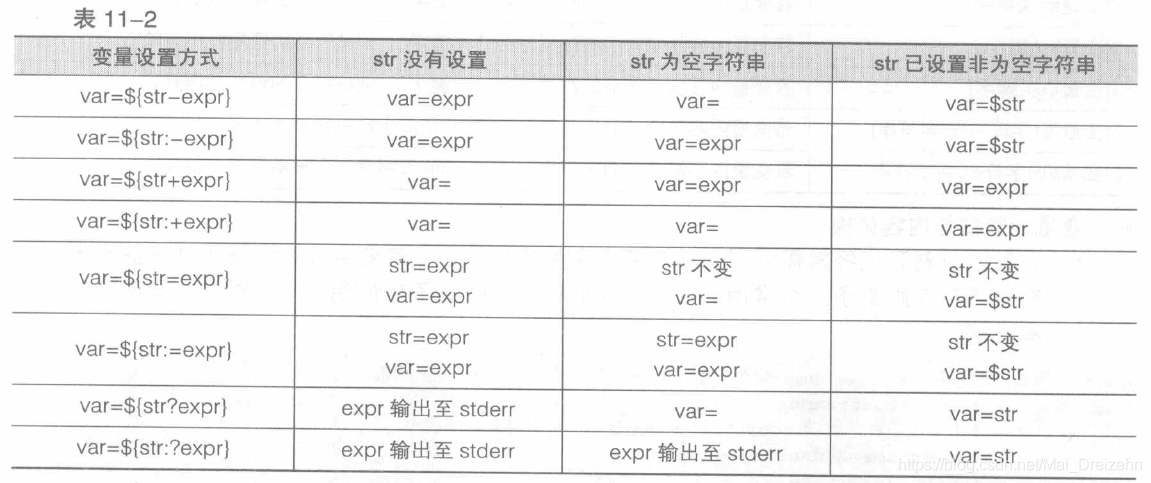
变量的测试与内容替换
alias:设置命令别名
unalias:去掉命令别名
source:读入环境配置文件

这样可以直接读取配置文件,而不注销登录
stty:stty -a(将目前所有的stty参数列出来)
set:除了可以用set来显示变量,还可以设置整个命令输出输入的环境。如记录历史命令,显示错误内容等。
test 测试
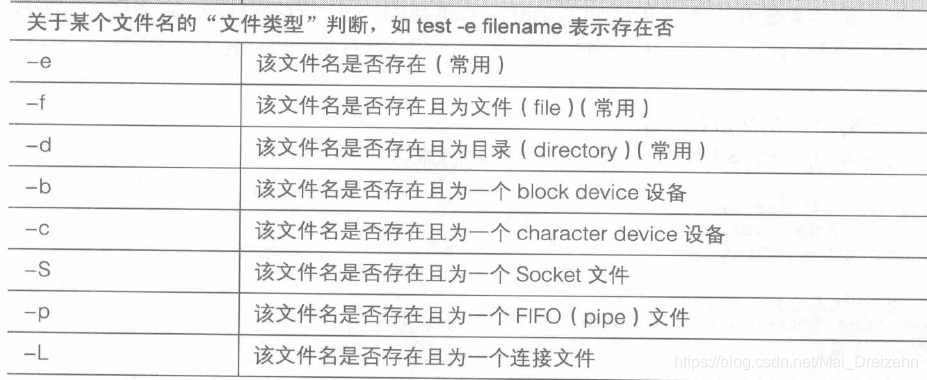
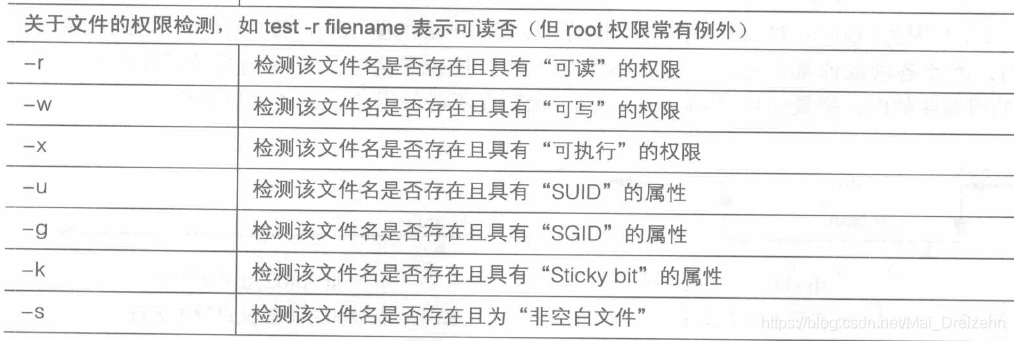

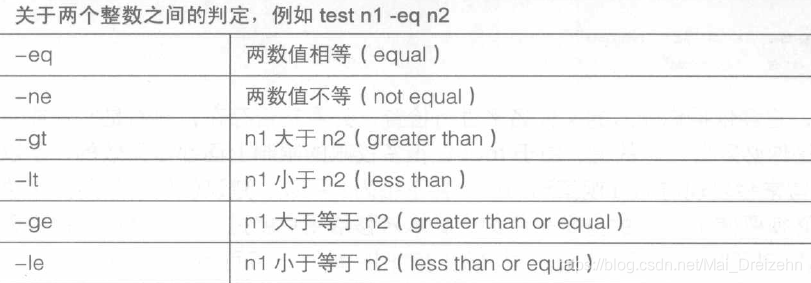
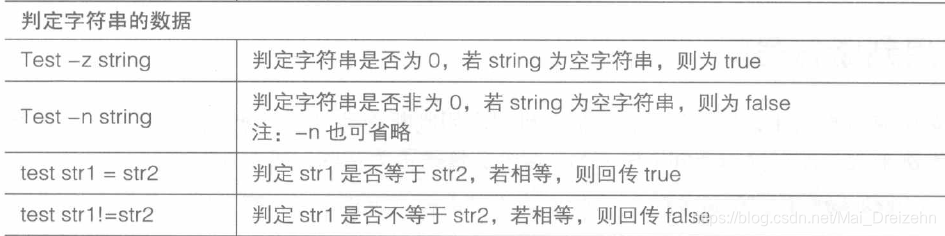

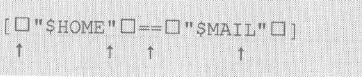
[] 判断符号来进行数据的判断
如果中括号作为shell的判断式时,必须要注意中括号的两端需要空格符来分隔。

















 1765
1765

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









