



 网络安全对抗演练,特别是红蓝对抗,是提升防御能力的有效方式。通过HVV精英课程,个人可以获得实战经验、技术提升、人脉积累,同时也能提高应对紧急网络安全事件的能力。课程涵盖九大模块,强调技术与安全意识并重,旨在培养全面的网络安全人才。
网络安全对抗演练,特别是红蓝对抗,是提升防御能力的有效方式。通过HVV精英课程,个人可以获得实战经验、技术提升、人脉积累,同时也能提高应对紧急网络安全事件的能力。课程涵盖九大模块,强调技术与安全意识并重,旨在培养全面的网络安全人才。
2023HW | 这9个方向进阶攻略请收好
随着网络技术的不断发展和复杂化,网络安全威胁也在不断增加。网络攻击可能导致数据泄露、系统瘫痪、经济损失等严重后果,因此网络安全防御能力的提高显得尤为重要。网络安全对抗演练可以帮助企业和个人了解网络安全威胁的特征和趋势,并且通过模拟攻击和防御,加深对网络安全防御技术的理解。
“红蓝对抗”演练作为一种提升网络安全防御能力的重要手段,已经被越来越多的安全团队所采用。这种靠“打出来”的防御理念变得越来越流行;作为一种模拟网络攻击和防御的实践活动,旨在帮助企业和个人了解网络安全防御技术和提高网络安全意识。它是确保网络安全的重要途径之一。
此外,网络安全对抗演练还可以帮助企业评估网络安全防御技术的效果,并且找出网络安全防御系统中的漏洞和缺陷,以便及时修复。网络安全对抗演练还可以帮助企业建立网络安全应急预案,为网络安全事件做好准备。
个人参加攻防演练有哪些收益?
实战经验 | 技术提升 | 人脉积累 | 赚点“小”钱 |
参加攻防演练可以将网络安全理论转化为实际应用,加深对网络安全的理解,很好的提升攻防实战能力和项目经验。近年来我国提出建设新时代网络安全,重视网安人员的实战化安全攻防能力,所以很多安全厂商在招聘时会青睐有攻防演练相关的项目实践经验人才。
实战经验 | 技术提升 | 人脉积累 | 赚点“小”钱 |
提高应对紧急情况的能力,为遇到实际的网络安全威胁做好准备。有些厂商会对驻场人员进行培训,由从业多年的攻防演练工程师指导你如何使用、监控主流的安全设备。在项目中可直接参与到大型企业网络的维护管理之中,为未来的职业发展积累宝贵经验。跟着大佬学技术,网安技能指数级提升!
实战经验 | 技术提升 | 人脉积累 | 赚点“小”钱 |
参加攻防演练的都是行业top,无论是个人还是安全厂商。项目里表现抢眼,项目还没结束可能就能收到某家厂商的offer或实习邀约了!
实战经验 | 技术提升 | 人脉积累 | 赚点“小”钱 |
为什么大家都挤破脑袋参加hvv?目前通过hvv面试的人员的日薪资市场价大概在1千-几千元之间,你就知道网安攻防人才有多吃香!
不花钱也能成为hvv精英
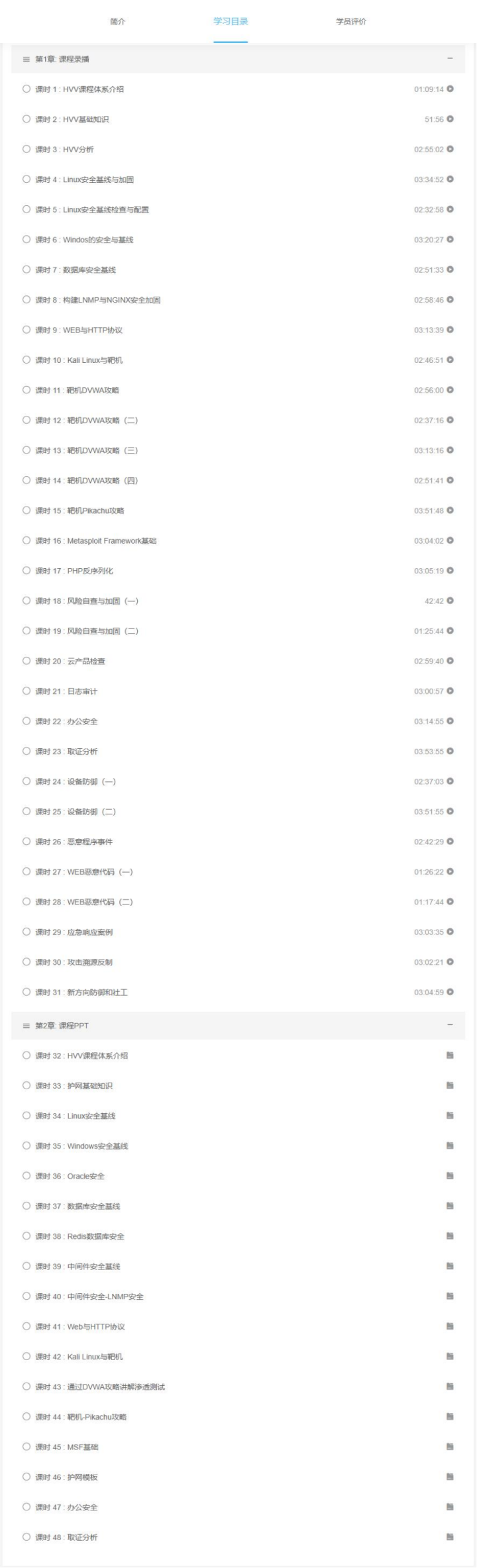
本次为大家准备的HVV精英课共计5000+分钟,涵盖攻防演练中所以会涉及到的技术内容系统性讲解;整体共分为九个模块,即:HVV基础知识、主机安全检测、自查与加固、基线检查、互联网暴露面评估、攻击溯源反制、办公安全、应急响应、新方向防御和社工。

编辑切换为居中
添加图片注释,不超过 140 字(可选)
课程除讲解技术方面外,也会强调“人的因素是网络安全中最主要的因素” ,即整个攻防演练中的办公安全以及反社工等安全意识强化教育的重要性,提醒大家在实践中要从技术武装到心理,创建武装到牙齿的安全防线。
HVV课程章节内容展示:


















 1万+
1万+

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











