




一、 IoU概述
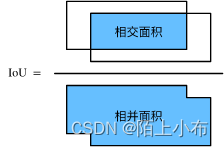
IoU的全称为交并比(Intersection over Union),是目标检测中使用的一个概念,IoU计算的是“预测的边框”和“真实的边框”的交叠率-,即它们的交集和并集的比值。最理想情况是完全重叠,即比值为1。
二、IoU计算
六种情况:
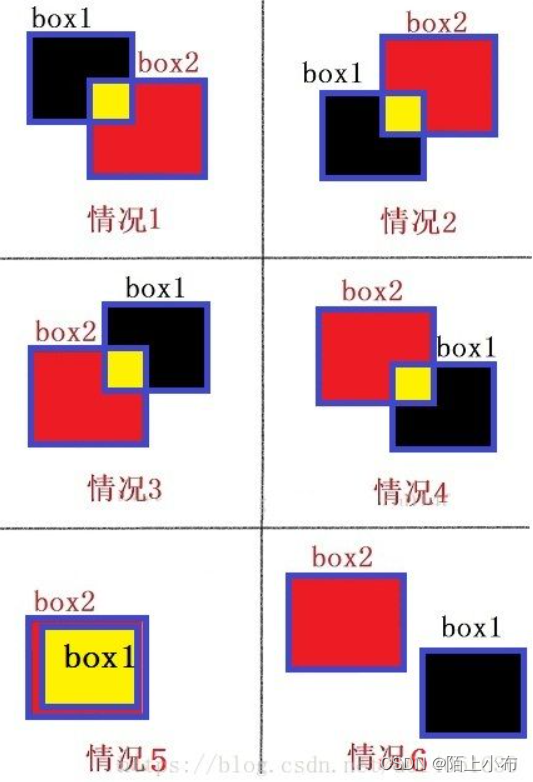
计算相交的面积和上个问题类似,只需计算出相交框的w与h如果没有相交,就是0。由上图可以发现以下规律:如果相交时
- xmin =max(xmin1, xmin2)#相交框xmin是两个框的左上角x坐标的最大值;
ymin =max(ymin1, ymin2)#相交框ymin是两个框的左上角y坐标的最大值;
xmax =min(xmax1, xmax2)#相交框xmax是两个框的右下角x坐标的最大值;
ymax =min(ymax1, ymax2)#相交框ymax是两个框的右下角y坐标的最大值;
最后处理一下不想交的情况即可,可以发现当不想交时,就会至少出现一下情况的一种:
xmax<=xmin or ymax<ymin
所以处理方法很简单:出现任一情况,w or h就会有一个等于0,使得计算出的面积也为0
w =max(0, xmax - xmin)
h =max(0, ymax - ymin)
所以整体代码就挥之欲出了,是不是也挺简单的:)
三、IoU代码实现
代码如下:
def intersection_over_union(boxA, boxB):
# determine the (x, y)-coordinates of the intersection rectangle
xA  最低0.47元/天 解锁文章
最低0.47元/天 解锁文章


















 5万+
5万+




 到【灌水乐园】发言
到【灌水乐园】发言







