



 本文探讨了复合直升机的设计特点,特别是同轴配置中各动力组件对飞行姿态的影响。提出了在不同速度模式下姿态角控制模型,并针对给定参数计算了飞行器在不同时间点的姿态变化。同时,文章还涉及了如何设计组件机动幅度以满足飞行任务需求,以及在加速机动中控制输入的动态设计。
本文探讨了复合直升机的设计特点,特别是同轴配置中各动力组件对飞行姿态的影响。提出了在不同速度模式下姿态角控制模型,并针对给定参数计算了飞行器在不同时间点的姿态变化。同时,文章还涉及了如何设计组件机动幅度以满足飞行任务需求,以及在加速机动中控制输入的动态设计。
A. 问题背景
直升机具备垂直起降等飞行能力,因而广泛应用于侦察和运输等领域。传统直升机的构造使得在高速飞行时旋翼叶片受到冲击波的影响,难以保持稳定飞行。为了保留直升机灵活的飞行能力的同时开发其高速飞行能力,采用固定翼与旋翼相结合的复合直升机设计,已成为必要的发展方向。
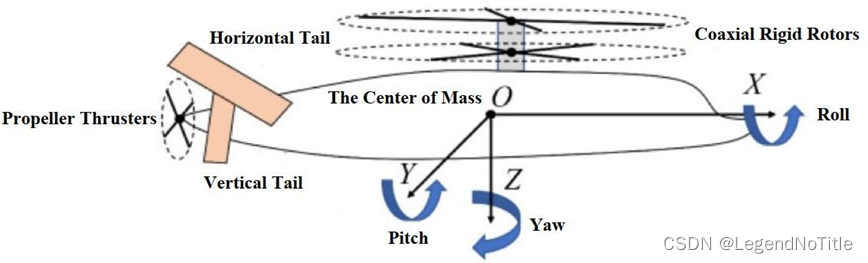
同轴直升机是复合直升机的典型类型。这种配置主要由四个动力组件组成:同轴刚性旋翼、螺旋桨推进器、水平尾翼和垂直尾翼。螺旋桨推进器和水平、垂直尾翼的中心均位于飞行器机身的对称平面上。飞行器的姿态角指的是飞行中的滚转角ϕ、俯仰角θ和偏航角ψ,相应的力矩分别称为滚转力矩、俯仰力矩和偏航力矩(如图1所示)。四个动力组件对飞行器姿态角的影响如下:
1) 由同轴刚性旋翼产生的空气动力力矩可近似为与空气密度ρ、旋翼盘面积和旋翼叶尖速度成比例的函数,正比例因子称为旋翼力矩因子。
2) 螺旋桨推进器通过旋转产生推力和旋转力矩。
3) 水平尾翼配备有升降舵控制装置,通过调整水平尾翼的相对角度来提供俯仰力矩。这个力矩与动压、水平尾翼面积以及水平尾翼与质心的横向距离成比例,比例系数称为水平尾翼力矩系数。
4) 与水平尾翼类似,垂直尾翼通过安装方向舵控制装置,调整相对角度来提供偏航/滚转力矩。这个力矩与动压、垂直尾翼面积以及垂直尾翼与质心的横向/纵向距离成比例,比例系数称为垂直尾翼力矩系数。
复合直升机的可操纵部分包括:
(1)同轴旋翼总距离,
(2)同轴旋翼差分总距离𝑑,
(3)同轴旋翼纵向循环俯仰,
(4)同轴旋翼横向循环俯仰,
(5)螺旋桨推进器操作容量,
(6)升降舵偏转值ℎ,
(7)方向舵偏转值𝑣。
根据直升机的飞行速度,在低速模式下(通常指速度低于85米/秒),姿态角控制主要通过同轴旋翼和螺旋桨推进器实现。在高速模式下(通常指速度高于100米/秒),姿态角控制主要通过螺旋桨推进器、升降舵和方向舵实现。
现有一个同轴复合直升机原型,通过风洞实验已获得了该飞行器的一些空气动力系数和机身参数,如附录I所示。
B.标题数据
参考附录一。
- 旋翼滚转力矩系数 = 滚转偏转值 + 横向俯仰滚转系数 × 横向循环俯仰 + 差分总距离滚转系数 × 差分总距离
- 旋翼俯仰力矩系数 = 俯仰偏转值 + 纵向可变俯仰系数 × 纵向循环俯仰 + 总俯仰系数 × 总距离 + 差分总俯仰系数 × 差分总距离
- 旋翼偏航力矩系数 = 偏航偏差 + 差分总俯仰偏航系数 × 差分总距离
C. 待解决的问题
1. 考虑给定的参数,建立复合直升机俯仰力矩的表达式,并开发俯仰角变化模型。请提供飞行器在5秒、10秒和20旋翼滚转力矩系数 = 滚转偏转值 + 横向俯仰滚转系数 × 横向循环俯仰 + 差分总距离滚转系数 × 差分总距离
旋翼俯仰力矩系数 = 俯仰偏转值 + 纵向可变俯仰系数 × 纵向循环俯仰 + 总俯仰系数 × 总距离 + 差分总俯仰系数 × 差分总距离
旋翼偏航力矩系数 = 偏航偏差 + 差分总俯仰偏航系数 × 差分总距离秒时的姿态角(初始飞行高度3000米,向前飞行速度分量80米/秒,垂直上升分量2米/秒,ϕ= 0度、𝑑=−2.1552度、θ=−3.4817度、ψ=−2.0743度、𝜏= 0度、ℎ=−9.0772×10^−7度、𝑣=4.1869×10^−7度)。
2. 根据所给参数,建立复合直升机滚转、俯仰和偏航力矩的表达式,并开发姿态角变化模型。请提供飞行器在5秒、10秒和20秒时的姿态角(初始飞行高度3000米,向前飞行速度分量80米/秒,垂直上升分量0.2米/秒,ϕ= 0度、𝑑=−2.1552度、θ=−3.4817度、ψ=−2.0743度、𝜏= 0度、ℎ=−9.0772×10^−7度、𝑣=4.1869×10^−7度)。
3. 基于直升机在低速和高速飞行时的机动特性,设计每个组件的机动幅度,以满足飞行器的水平飞行任务(零姿态角)(初始飞行高度3000米,向前飞行速度分量80米/秒,垂直上升分量0.2米/秒;初始飞行高度3000米,向前飞行速度分量180米/秒,垂直上升分量0.2米/秒)。
4. 考虑到直升机的加速机动任务,其中向前飞行速度分量在20秒内均匀增加从80米/秒至180米/秒(假设前向加速完全由螺旋桨推进器提供),请设计每个控制输入的动态值,以实现飞行器的向前加速和水平飞行(零姿态角),同时考虑到直升机在低速和高速飞行时的机动特性(初始飞行高度3000米,飞行垂直上升分量率0.2米/秒)。


















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









