




第2章 图像形成(Image Formation)
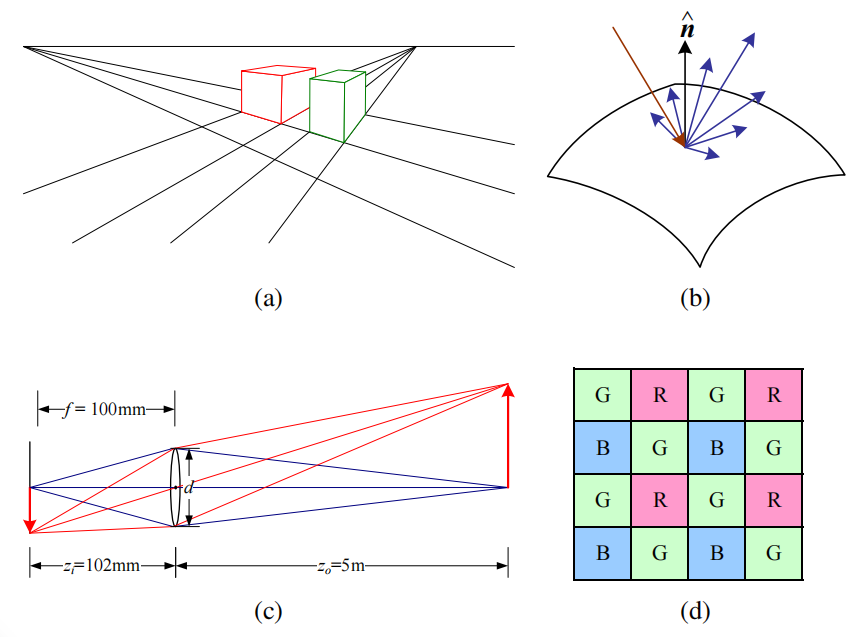
图 2.1 (a)透视投影;(b)光线在撞击表面时的散射;(c ) 镜头光学;(d)Bayer彩色滤光阵列
本章核心目标:
在分析和处理图像之前,必须建立对场景几何和图像形成过程的理解。这一章提出了一个简化的图像形成模型,帮助理解以下关键问题:
图像是如何由场景几何、光照、表面属性和相机光学共同作用形成的?
章节结构与要点:
🔷 2.1 几何建模与投影
- 引入了几何图元(点、线、平面)
- 介绍了如何通过几何变换将三维物体投影成二维图像特征(如图 2.1a)
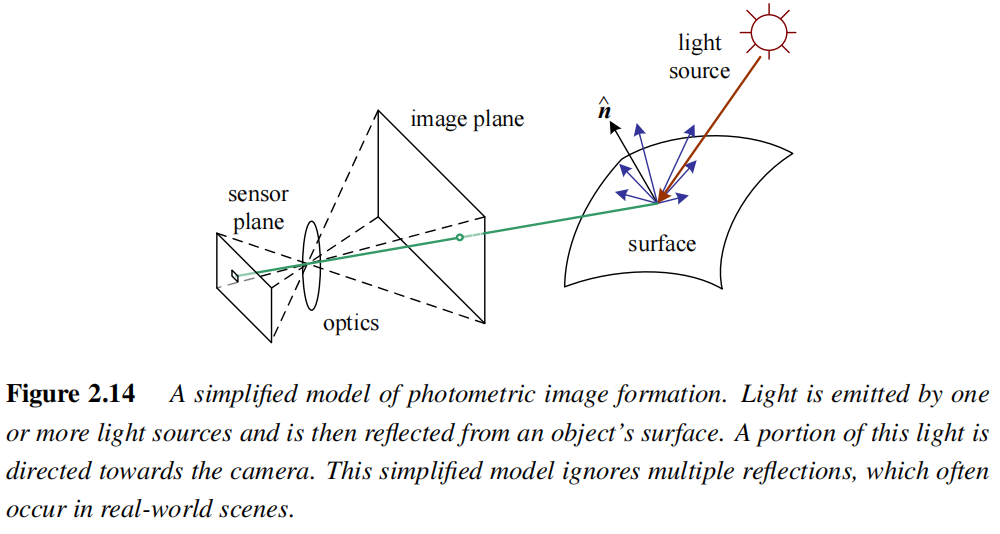
🔷 2.2 光度建模(Photometric Image Formation)
- 探讨光照、物体表面属性(如反射率)与相机光学系统的相互作用
- 解释这些因素如何决定最终落在图像传感器上的颜色值(如图 2.1b 和 2.1c)
🔷 2.3 数字图像采样
- 说明连续的光强如何被离散地采样成数字图像(如图 2.1d)
- 探讨采样问题(如混叠 aliasing)以及如何避免或建模这些问题
总结一句话:
本章搭建了理解图像从真实世界到数字图像转换过程的桥梁,涵盖从几何建模、光照反射到相机采样的完整链路,是理解后续视觉算法的基石。
2.1 几何图元与变换(Geometric primitives and transformations)
本节核心目标:
建立图像几何基础:理解2D与3D中点、线、面的表示方法及其在投影变换中的作用,是后续图像建模、标定与重建的前提。
一、二维几何图元(2D Primitives)
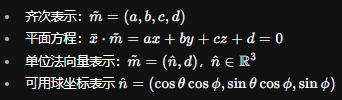
- 2D 点(Points)
- 2D 直线(Lines)
- 2D 点线运算

- 2D 二次曲线(Conics)

二、三维几何图元(3D Primitives)
- 3D 点(Points)
- 3D 平面(Planes)
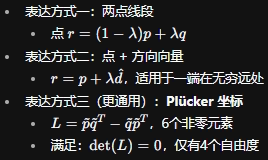
- 3D 直线(Lines)
- 3D 二次曲面(Quadrics)

三、图元与变换的关系
几何图元(点、线、面)是图像几何建模的基础构件,通过各种**变换(仿射、投影)**可以描述从3D世界到2D图像的投影关系。相关变换将在下一节继续展开。
总结一句话:
掌握二维与三维中点、线、面及其齐次表示,是理解相机成像、图像变换和三维重建的基础,后续章节中将基于这些几何构件构建图像处理与视觉模型。
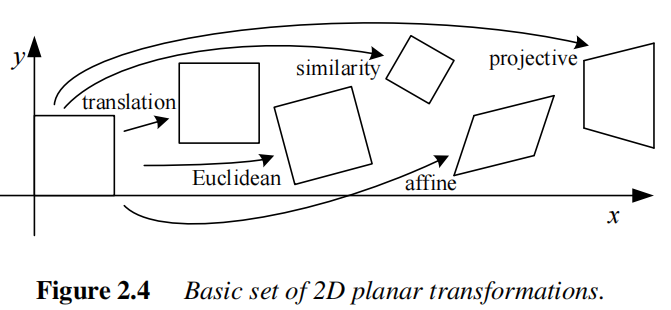
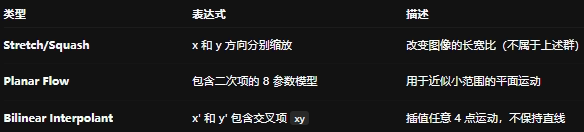
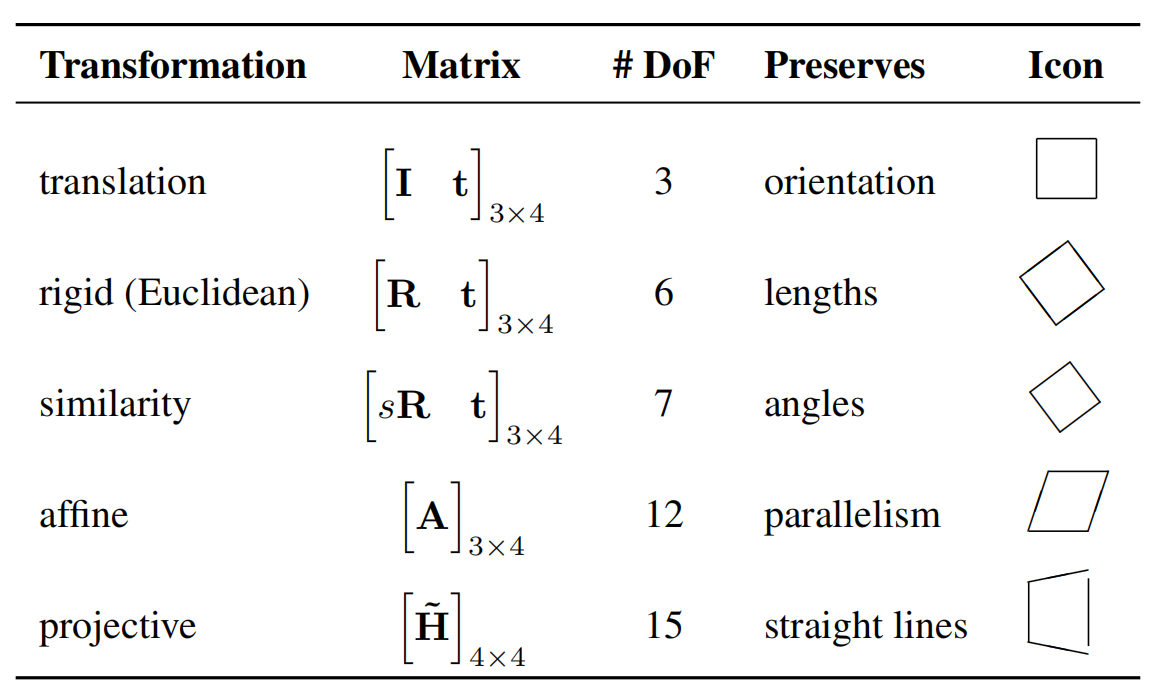
图2.4 二维平面变换基础集
2.1.1 二维变换(2D transformations)
核心目标:
掌握将二维图像中的几何对象(点、线)进行各种几何变换的方法,并理解这些变换之间的层级关系。
常见的二维几何变换类型:
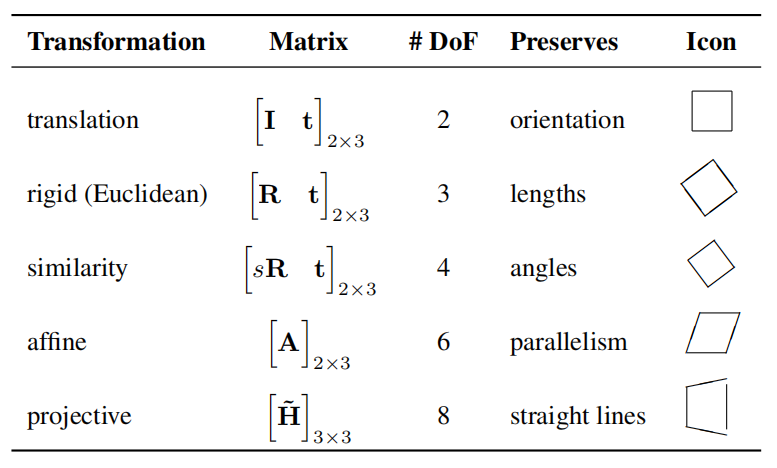
表2.1 变换类型:平移、刚体变换、相似变换、放射变换、投影变换

注:2×3 矩阵可通过添加 [0^T, 1] 扩展为 3×3 矩阵,用于齐次坐标变换。
变换矩阵的嵌套关系(子群):
每种变换类型是下一种更一般变换的特例:
Translation ⊂ Rigid (Euclidean) ⊂ Similarity ⊂ Affine ⊂ Projective
这些变换满足群的性质:封闭、存在逆元素,可组合。
其他常见扩展变换:
🔎 应用提示:
- 投影变换(Projective/Homography)是图像配准、相机建模、结构光等任务的核心工具。
- 各类变换适用于不同精度、自由度要求的视觉任务。
- 齐次坐标形式使得变换组合和逆运算更为方便。
2.1.2 三维变换(3D transformations)
整体结构与层级关系
- 3D坐标变换和2D类似,也构成嵌套的变换群,例如 SE(3)、Sim(3) 等。
- 每种变换都可以通过矩阵作用于齐次坐标来表示(3×4或4×4矩阵)。
- 每种变换都保留其下层变换的几何性质。
各类3D变换类型一览
包含平移、刚体(欧式)、相似变换、仿射变换、投影变换。
几何属性对应方向、长度、角度、平行性、直线性。
各类变换详解
🔹 1. 平移 (Translation)

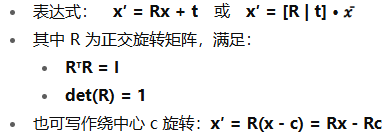
🔹 2. 刚体变换 (Rigid / Euclidean / SE(3))
🔹 3. 相似变换 (Similarity)

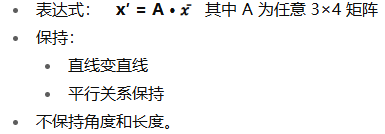
🔹 4. 仿射变换 (Affine)
🔹 5. 投影变换 (Projective / Perspective / Homography)
注意点:
- 所有变换都作用于齐次坐标向量(homogeneous coordinates)。
- 多数应用(如相机投影、图像变形)最终都会涉及projective变换。
- 与2D类似,3D刚体与投影变换也具有 Lie 群结构(SE(3)、SO(3) 等)。
2.1.3 三维旋转(3D rotations)
3D旋转的表示和参数化
- 区别于2D旋转,3D旋转的参数化更复杂,存在多种表示方式,各有优缺点。
Euler角(欧拉角)
- 通过绕三个固定轴(如x、y、z)依次旋转得到旋转矩阵。
- 缺点:
-
- 旋转结果依赖旋转顺序。
-
- 参数空间不连续,可能发生“万向锁”(Gimbal Lock),导致角度剧烈变化。
- 因此不推荐使用,除非在特定场景(如云台运动)较直观。
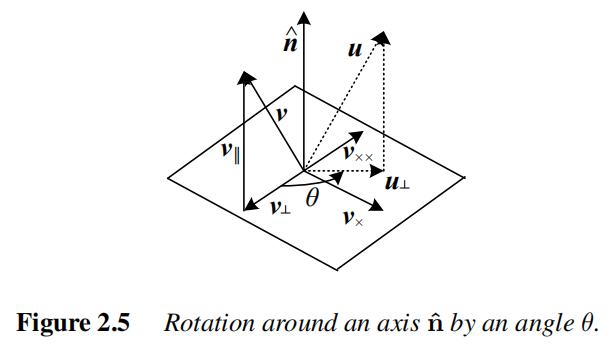
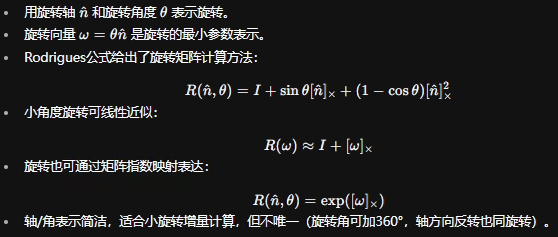
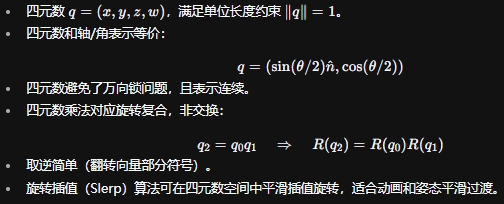
轴/角表示(Axis/Angle)
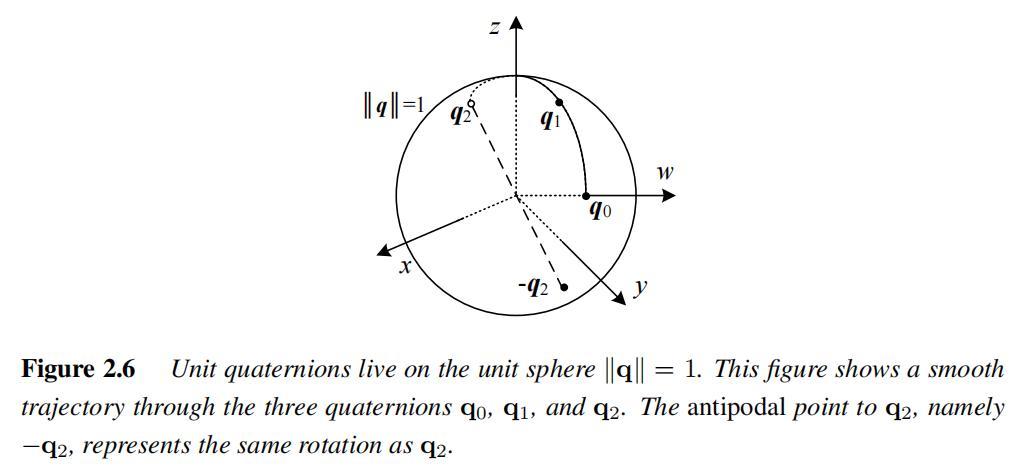
单位四元数(Unit Quaternions)
旋转表示选择建议

2.1.4 三维到二维的投影(3D to 2D projections)
3D到2D投影基础
- 目标:将3D空间点投影到2D图像平面。
- 使用线性投影矩阵表示转换关系。
- 投影模型分为:
正射投影(Orthographic)
透视投影(Perspective)
正射投影与准透视投影
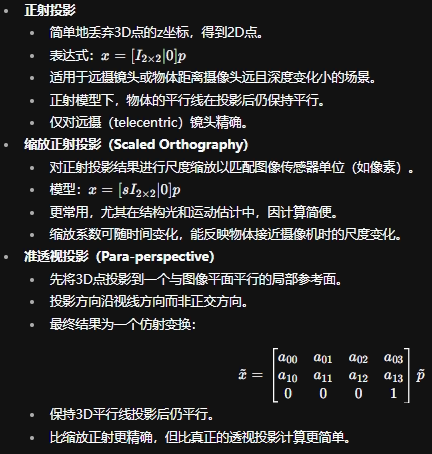
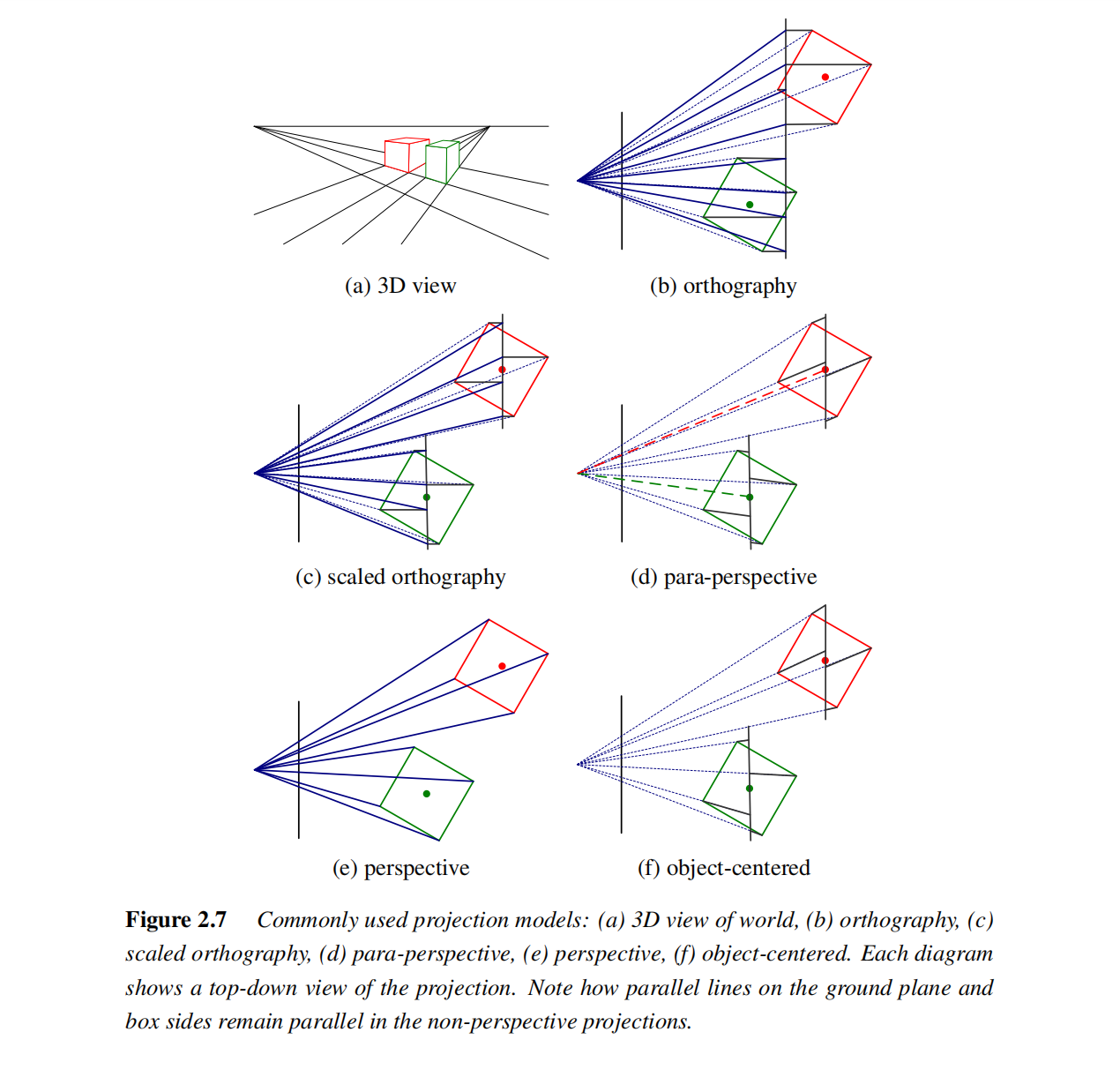
总结
- 正射和准透视投影均属于线性或仿射投影,计算简单,适合深度变化小或远距离场景。
- 这些模型在视觉任务(如结构重建、相机位姿估计)中广泛使用,因其简化计算且保持重要几何特性。
- 真实摄像头成像更符合透视投影模型,但复杂度较高,需引入非线性除法。
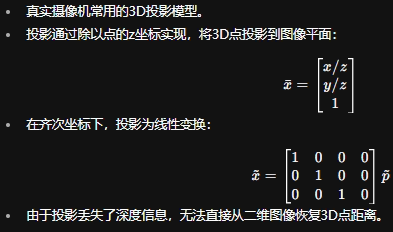
透视投影基本原理
计算机图形中的透视投影实现
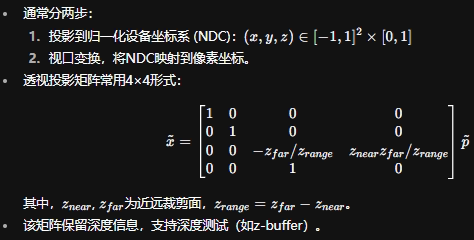
透视投影的特殊情况和便利性

深度与3D点恢复
- 普通2D相机无法直接测距。
- 通过深度传感器或立体匹配算法可获取深度信息。
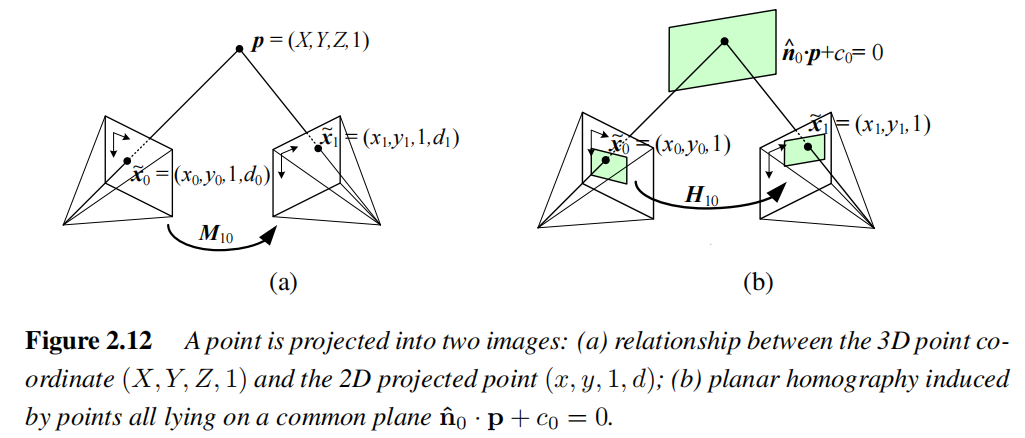
- 若投影矩阵是满秩4×4矩阵,则可通过逆矩阵将深度或视差映射回3D点。
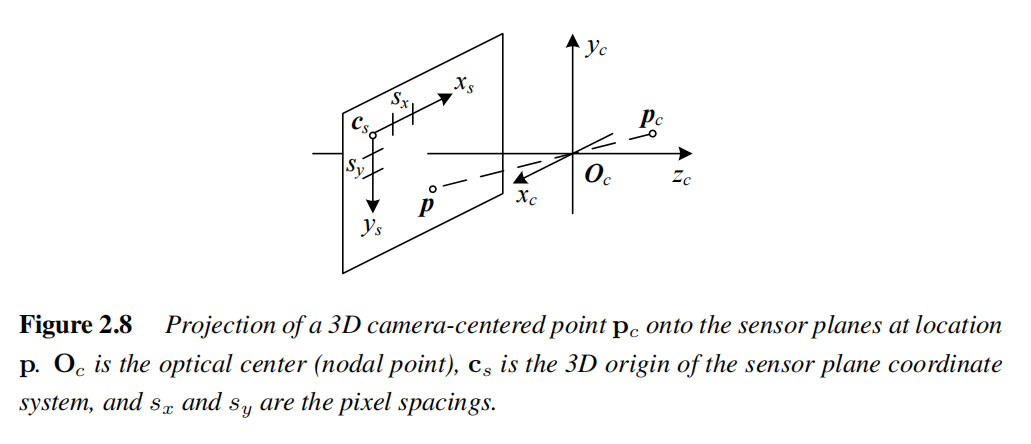
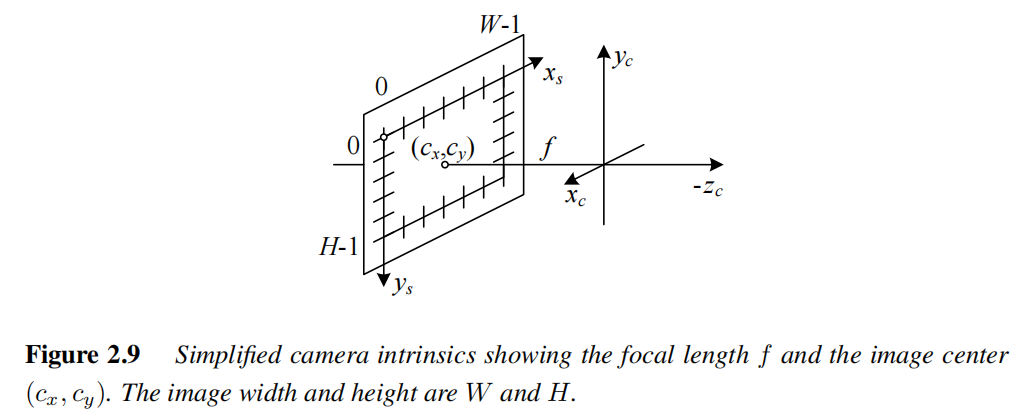
附图说明
- 图示说明相机中心、传感器坐标系及像素间距等概念,帮助理解投影过程。
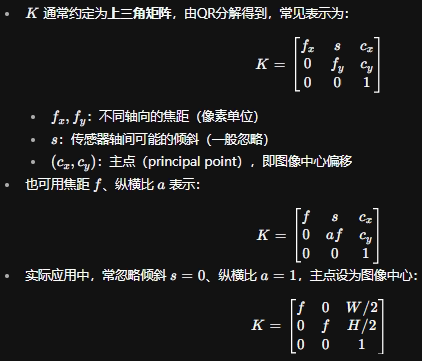
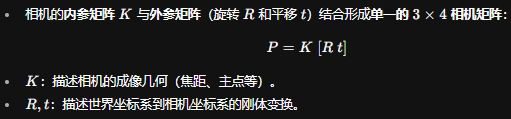
相机内参的意义
标定矩阵 𝐾

常用简化形式
标定与外参的关系
直观示意
焦距表达的困惑

焦距与视场角的关系

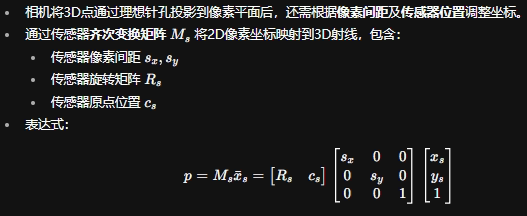
像素单位与物理单位的转换

归一化设备坐标(Normalized Device Coordinates)

标准化焦距的优势
焦距单位转换

Camera matrix(相机矩阵)
-
相机矩阵的组成
-
4×4 可逆相机矩阵
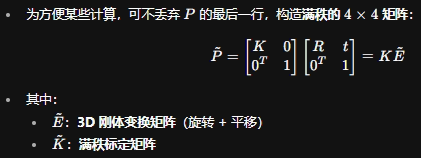
-
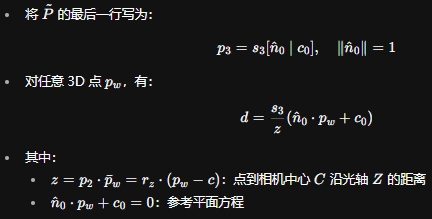
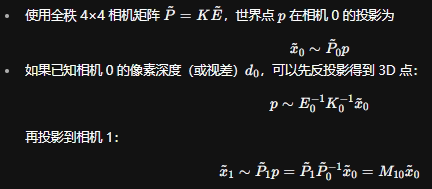
从 3D 世界坐标到屏幕坐标(含视差)
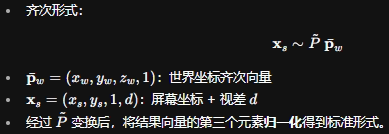
-
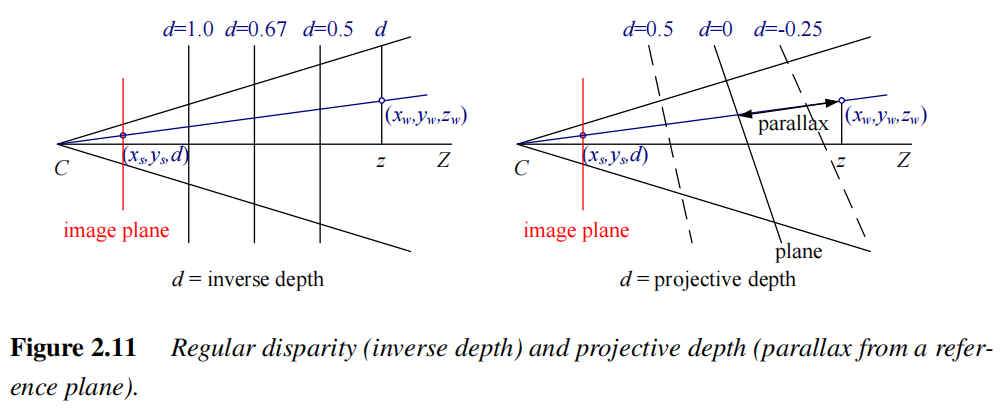
深度的两种表示

-
应用意义

Plane plus parallax(投影深度) -
背景与自由度

-
一般形式
-
投影深度(Projective depth)
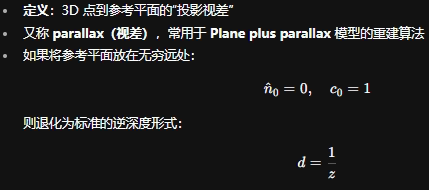
-
从像素+深度回到 3D
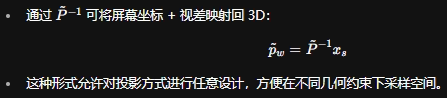
-
应用价值
- 多视图立体(MVS):可以灵活定义参考平面,按视差采样空间
- 平面扫描(plane sweeping):可根据图像运动模式调整采样分布
- 几何建模与渲染:投影深度不仅能表达几何,还能优化匹配与重建精度
从一个相机映射到另一个相机 的方法
- 一般三维到二维映射
- 特殊情况一:平面场景(Plane-Induced Homography)
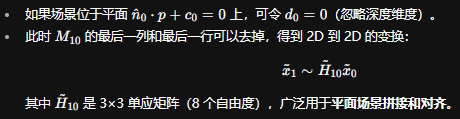
- 特殊情况二:纯旋转(Pure Rotation)

精简总结:

这一节主要讨论长焦镜头下物距与焦距难以区分的问题,并给出了一个数学重写方法来分离这两个因素。
核心问题

数学推导
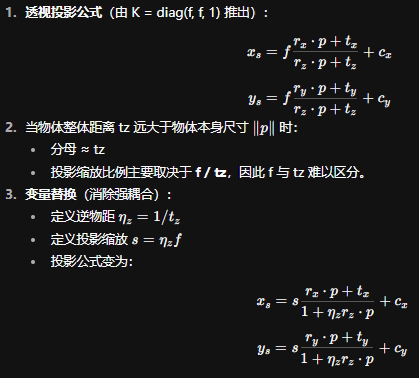
好处

2.1.5 镜头畸变(Lens distortions)
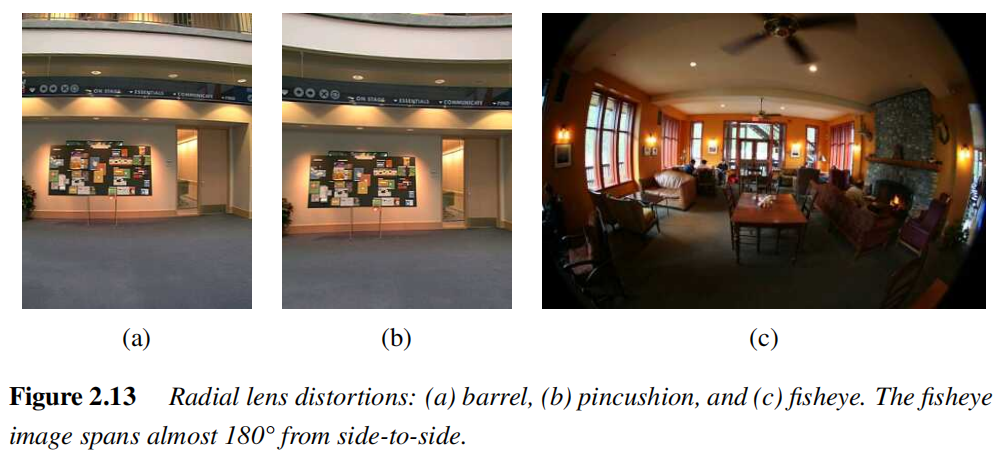
线性投影假设的破坏
- 理想模型:直线物体投影到图像仍是直线(线性矩阵运算)。
- 现实中:广角镜头存在径向畸变(radial distortion),直线会弯曲。
- 如果不校正畸变,高精度重建会出错,例如拼接图像会出现模糊。
径向畸变建模
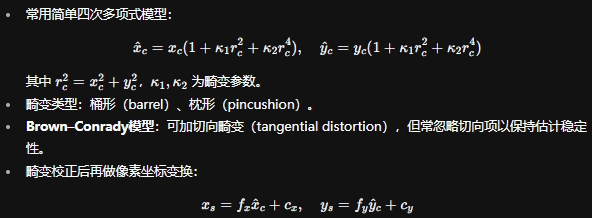
更复杂的畸变情况

数学处理上的注意点
- 畸变引入非线性,投影矩阵与旋转矩阵不能简单组合成上三角形式。
- 若校正到直线恢复,可视为恢复了线性成像模型,原有的分解方法依然适用。


















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









