







1、单片机执行程序流程
写代码---编译代码生成.hex文件---.hex文件通过ISP下载到单片机---单片机重新上电后会执行程序
2、单片机能干哪些事?
IO口的供电,串口的数据传输等等

3、_nop_();函数需要添加头文件
#include <intrins.h>
4、定时器与计数器
4.1在C51中什么是定时器与计数器
C51中的定时器和计数器是同一个硬件电路支持的,通过寄存器配置不同,就可以将他当做定时器或者计数器使用。
定时器和计数器,电路一样
定时器和计数器区别是,致使他们背后的计数存储器加1的信号不同。当配置为定时器使用时,每经过1个机器周期,计数存储器的值就加1。而当配置为计数器时,每来一个负跳变信号(从高电平转变到低电平),就加1,以此达到计数的目的。
定时或者计数的本质就是让单片机某个部件数数
当定时器用的时候,靠内部振荡电路数数
当计数器用的时候,数外面的信号,读取针脚的数据
标准C51有2个定时器/计数器:T0和T1。他们的使用方法一致。C52相比C51多了一个T2
4.2定时器怎么定时?
定时器的本质原理: 每经过一个机器周期,就在寄存器中+1
- 什么是晶振?
晶振(晶体震荡器),又称数字电路的“心脏”,是各种电子产品里面必不可少的频率元器件。
数字电路的所有工作都离不开时钟,晶振的好坏、晶振电路设计的好坏,会影响到整个系统的稳定性。
- 什么是时钟周期?
时钟周期也称为振荡周期,定义为时钟频率的倒数(晶振的倒数)。
时钟周期是计算机中最基本的、最小的时间单位。在一个时钟周期内,CPU仅完成一个最基本的动作。时钟周期是一个时间的量。更小的时钟周期就意味着更高的工作频率
- 什么是机器周期?
机器周期也称为CPU周期。
在计算机中,为了便于管理,常把一条指令的执行过程划分为若干个阶段(如取指、译码、执行等),每一阶段完成一个基本操作。完成一个基本操作所需要的时间称为机器周期。
一般情况下,一个机器周期由若干个时钟周期组成(6倍或者是12倍,具体看单片机手册)
具体关系如图所示:

4.3定时器编程
C51单片机中的定时器与计数器T0和T1是单片机内部两个独立的硬件资源,分别用于定时和计数功能。
在C51单片机中,定时器/计数器T0和T1具有以下主要区别和功能:
- T0可以分成两个独立的8位定时器,而定时器1(T1)则不能。
- T1可以作为串口的波特率发生器,而定时器0(T0)则不能。
- T0和T1在计数过程中不需要CPU参与,也不影响CPU的其他工作。当计数溢出后,定时/计数器会给出中断信号,申请CPU停止当前工作,去处理预先设定的中断事件。
具体来说,T0和T1的结构和工作方式如下:
- T0和T1都是由高8位(TH0或TH1)和低8位(TL0或TL1)两个寄存器组成的16位加1计数器。
- T0和T1可以通过TMOD和TCON两个控制寄存器来设置各自的工作方式,选择定时或计数功能,并控制启动运行及作为运行状态的标志23。
此外,C51单片机中的定时器/计数器系统与CPU和晶振通过内部连接相互作用。当CPU开启其功能后,定时计数器便在晶振的作用下开始独立工作。定时器本质上是一个16位加1计数器,既可以作为定时器使用,也可以作为计数器使用,具体取决于输入信号的来源。
定时器/计数器0有4种工作模式:
模式0(13位定时器/计数器)
模式1(16位定时器/计数器模式)
模式2(8位自动重装模式)
模式3(两个8位定时器/计数器)
定时器/计数器1除模式3外,其他工作模式与定时器/计数器0相同,T1在模式3时无效,停止计数。
图
 中的:
中的:
- 在哪里加1?最大计数时间,也就是爆表了能计算多长 ?
- 如何算出10ms定时器的初值 ?
4.3.1定时器/计数器控制寄存器TCON

- 怎么知道爆表 ?
- 怎么开始计时 ?
- 定时器使用是有很多种模式的

- 四个二进制数表示一位的16进制数
1111 = 2^4 = 16
- 8421法进制的转换(方便人类来看,对计算机底层来说,不关心进制010101010)
例如:

- 配寄存器推荐用按位操作:清零的时候,对应的需要清零的位-----与(&0)上0,不需要清零的位-----与(&1)上1
- 置1的时候,需要置1的位置-----或1(|1),不需要置1的位置------或0(0)
4.3.2 降低单片机时钟对外界电磁辐射(EMI)
AUXR表示为特殊功能寄存器

4.4 定时器中断方式控制
4.4.1 概述
中断系统是为使CPU具有对外界紧急事件的实时处理能力而设置的。
当中央处理机CPU正在处理某件事的时候外界发生了紧急事件请求,要求CPU暂停当前的工作,转而去处理这个紧急事件,处理完以后,再回到原来被中断的地方,继续原来的工作,这样的过程称为中断。
实现这种功能的部件称为中断系统,请示CPU中断的请求源称为中断源。
微型机的中断系统一般允许多个中断源,当几个中断源同时向CPU请求中断,要求为它服务的时候,这就存在CPU优先响应哪一个中断源请求的问题。通常根据中断源的轻重缓急排队,优先处理最紧急事件的中断请求源,即规定每一个中断源有一个优先级别。
CPU总是先响应优先级别最高的中断请求。
当CPU正在处理一个中断源请求的时候(执行相应的中断服务程序),发生了另外一个优先级比它还高的中断源请求。如果CPU能够暂停对原来中断源的服务程序,转而去处理优先级更高的中断请求源,处理完以后,再回到原低级中断服务程序,这样的过程称为中断嵌套。
这样的中断系统称为多级中断系统,没有中断嵌套功能的中断系统称为单级中断系统
interrupt 0;
4.4.2 中断的触发
在51单片机中,中断有两种方式,一种是外部中断,一种是定时器中断
在定时器中断中,当定时器计数达到65536下,就会溢出,此时触发中断
在外部中断中,
当某种外部事件发生时,单片机的中断系统将迫使CPU暂停正在执行的程序,转而去进行中断事件的处理;中断处理完毕后.又返回被中断的程序处,继续执行下去。
外部中断分为两种触发方式:
(1)电平触发方式
这种方式能提高CPU对外部中断请求的响应速度。当外部中断源被设定为电平触发方式时,在中断服务程序返回之前,外部中断请求输入必须无效(即外部中断请求输入已由低电平变为高电平),否则CPU返回主程序后会再次响应中断。
所以电平触发适合于外部中断以低电平输入且中断服务程序能清除外部中断请求源(即外部中断输入电平又变为高电平)的情况。
(2)跳沿触发方式
在这种方式下,如果相继连续两次采样,一个机器周期采样到外部中断输入为高,下一机器周期采样为低,则中断申请触发器置“1”,直到CPU响应此中断时,该标志才清“0”。但输入的负脉冲宽度至少要保持1个机器周期(若晶振频率为6MHz,则为2s),才能被CPU采样到。
--外部中断原文链接【51单片机】中断与定时计数_51单片机外部中断计数-优快云博客
代码的使用:
void HanShuMing(void) interrupt 0
void HanShuMing2(void) interrupt 1
void HanShuMing3(void) interrupt 2
void HanShuMing4(void) interrupt 3
void HanShuMing5(void) interrupt 4
.......
- 中断寄存器

CPU能响应定时器0中断的条件:需要配置IE寄存器的bit1: ET0 bit7:EA


由上可知: ET0的中断查询序列是1
4.4.3中断代码详解
/*******************************************************
*********定时器中断控制LED每隔1秒亮灭一次********************
*****main中控制另外一个灯每个300ms亮灭一次,有点多线程的意思了***
*******************************************************/
#include "reg52.h"
sbit led = P3^6;
sbit led1 = P3^7;
int cnt = 0;
void Time0Init()
{
//1. 配置定时器0工作模式位16位计时
TMOD = 0x01;
//2. 给初值,定一个10ms出来
TL0=0x00;
TH0=0xDC;
//3. 开始计时,定时器"数数"
TR0 = 1;
TF0 = 0;
//4. 打开定时器0中断
ET0 = 1;
//5. 打开总中断EA
EA = 1;
}
void Delay300ms() //@11.0592MHz 软件延时,CPU“数数”
{
unsigned char i, j, k;
i = 3;
j = 26;
k = 223;
do
{
do
{
while (--k);
} while (--j);
} while (--i);
}
void main()
{
led = 1;
Time0Init();
while(1){
led1 = 0;
Delay300ms();
led1 = 1;
Delay300ms();
}
}
void Time0Handler() interrupt 1
{
cnt++; //统计爆表的次数
//重新给初值
TL0=0x00;
TH0=0xDC;
if(cnt == 100){//爆表100次,经过了1s
cnt = 0; //当100次表示1s,重新让cnt从0开始,计算下一次的1s
led = !led;//每经过1s,翻转led的状态
}
}这里的定时器0相当于一个10ms的倒计时,一旦定时器0被配置并开始计数,它会不断地计数直到溢出,当发生爆表的时候,触发中断处理函数,而在中断处理函数中,定时器的初值重新设定,维持10ms的定时。以便定时器可以继续计数,每次定时器溢出的时候也都会继续触发中断处理函数。由于 main() 函数中包含了一个无限循环 while(1){},程序会一直在这个循环中运行,而定时器则会在后台不断地计数和触发中断。
在51单片机中当定时器溢出时,CPU会暂停当前正在执行的程序,定时器是硬件资源,它们可以独立于CPU运行,并在达到预设条件时触发中断。这个是否冲突?为什么?
在51单片机中,当定时器溢出时,并不会立即导致CPU暂停当前正在执行的程序。实际上,定时器的溢出只是设置了一个中断标志(如TF0),表示定时器已经计数到了其最大值并溢出。这个中断标志是硬件自动设置的,但它本身并不会直接中断CPU的执行。
中断的触发是由中断系统根据中断标志和中断允许位(如ET0和EA)来决定的。当中断标志被设置,并且相应的中断允许位也被设置时,中断系统会在CPU执行到下一个指令的某个特定时刻(通常是在指令的末尾或者在下一个机器周期的开始),使CPU暂停当前程序的执行,并跳转到中断处理程序的入口地址开始执行中断处理程序。
因此,说“定时器溢出时,CPU会暂停当前正在执行的程序”是不准确的。更准确的说法应该是“当定时器溢出并且中断被允许时,CPU会在适当的时机暂停当前程序的执行,并跳转到中断处理程序”。
定时器作为硬件资源,确实可以独立于CPU运行,它们有自己的时钟源和计数器,可以在不需要CPU干预的情况下进行计数。当定时器达到预设条件(如溢出)时,它们通过设置中断标志来通知CPU,但并不会直接中断CPU的执行。CPU是否响应这个中断,取决于中断系统的状态和中断允许位的设置。
所以,定时器溢出和CPU暂停执行程序之间并没有直接的冲突。它们是通过中断系统有机地联系在一起的,使得CPU可以在处理其他任务的同时,也能够响应定时器的溢出事件。
4.5 PWM开发SG90舵机
4.5.1 简介
PWM ,英文名 Pulse Width Modulation ,是脉冲宽度调制缩写,它是通过对一系列脉冲的宽度进 行调制,等效出所需要的波形(包含形状以及幅值),对模拟信号电平进行数字编码,也就是说通过 调节占空比的变化来调节信号、能量等的变化,占空比就是指在一个周期内,信号处于高电平的 时间占据整个信号周期的百分比,例如方波的占空比就是 50%.
- 脉冲宽度调制
- 通过占空比编码模拟信号
- 占空比是: 一个周期(一个高电平和一个低电平)内,高电平占据时长的百分比

4.5.2 如何实现PWM信号输出
1. 通过芯片内部模块输出,一般观察手册或者芯片IO口都会标明这个是否是PWM口

2. 如果没有集成PWM功能,可以通过IO口软件模拟,相对硬件PWM来说精准度略差
4.5.3 控制舵机
1.什么是舵机

4.5.4 实现舵机角度转变代码
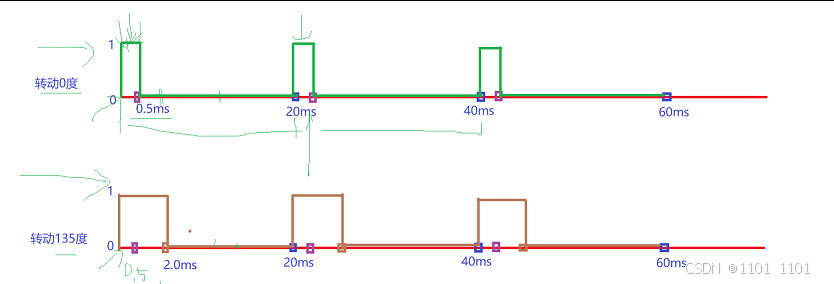
实现目标:完成舵机从0°延迟两秒到135°延迟两秒再到0°,如此循环往复的实现
代码如下:
/*******************************************************
*********舵机黄色信号线接P1.1口,每隔2秒从0度到135度切换********
*************注意:初值不要算错,修改位置两个地方**************
*******************************************************/
#include "reg52.h"
sbit sg90_con = P1^1;
int jd;
int cnt = 0;
void Delay2000ms() //@11.0592MHz
{
unsigned char i, j, k;
i = 15;
j = 2;
k = 235;
do
{
do
{
while (--k);
} while (--j);
} while (--i);
}
void Time0Init()
{
//1. 配置定时器0工作模式位16位计时
TMOD = 0x01;
//2. 给初值,定一个0.5出来
TL0=0x33;
TH0=0xFE;
//3. 开始计时
TR0 = 1;
TF0 = 0;
//4. 打开定时器0中断
ET0 = 1;
//5. 打开总中断EA
EA = 1;
}
void Delay300ms() //@11.0592MHz
{
unsigned char i, j, k;
i = 3;
j = 26;
k = 223;
do
{
do
{
while (--k);
} while (--j);
} while (--i);
}
void main()
{
Delay300ms();//让硬件稳定一下
Time0Init(); //初始化定时器
jd = 1; //初始角度是0度,0.5ms,溢出1就是0.5,高电平
cnt = 0;
sg90_con = 1;//一开始从高电平开始
//每隔两秒切换一次角度
while(1){
jd = 4; //135度 2ms高电平
cnt = 0;
Delay2000ms();
jd = 1; //0度
cnt = 0;
Delay2000ms();
}
}
void Time0Handler() interrupt 1
{
cnt++; //统计爆表的次数. cnt=1的时候,报表了1
//重新给初值
TL0=0x33;
TH0=0xFE;
//控制PWM波
if(cnt < jd){
sg90_con = 1;
}else{
sg90_con = 0;
}
if(cnt == 40){//爆表40次,经过了20ms
cnt = 0; //当100次表示1s,重新让cnt从0开始,计算下一次的1s
sg90_con = 1;
}
代码实现的流程顺序如下:
首先要知道三件事:
1、定时器定时0.5ms,超过0.5ms爆表,执行中断处理函数,中断处理函数中为什么要判断是否爆表达到40次?
因为达到40次时,是一个周期,cnt置0,重新计算爆表次数,舵机给高电平,持续输出PWM波。
2、为什么一开始就给sg90_con一个高电平?
因为想让程序一执行开始PWM波就有一个0.5ms的高电平,而进入中断处理函数后cnt++ => cnt = 1;然后有判断子句if(cnt < jd),初始判断1<1?执行,迅速给sg90一个低电平,这样一个0.5ms转动0°的波就画好了。
3、在执行中断处理函数过程中,主函数中的代码是否是完全的不在执行?
并不是这样的,这里其中有一点多线程的滋味,什么是多线程呢?
多线程(multithreading)是指从软件或硬件上实现多个线程并发执行的技术,其目的是提升整体处理性能。多线程允许计算机在同一时间内执行多个线程,这些线程可以共享进程的资源,如计算单元、缓存等,从而提高资源的利用率
多线程是多个线程并发执行的计数,但是这里主函数中在执行程序的时候,执行到定时器的初始化,触发定时器的中断处理函数和接下来主函数的执行,并不是多线程的过程。实际上定时器是单片机内部的硬件资源,当定时器溢出并且中断被允许时,CPU会在适当的时机暂停当前程序的执行,并跳转到中断处理程序。
代码详解:
先看主函数,延迟300ms让硬件稳定,执行初始化定时器,定时器定时0.5ms,在TR0 = 1;时开始计时,jd = 1; cnt = 0; sg90 =1; 初始条件,这个时候就有0.5ms的高电平了,然后进入中断处理函数,cnt++ =》 cnt = 1; 重新赋给初值,进入判断语句,cnt<jd ? 1<1 ? 执行else sg90 = 0;给sg90低电平,当jd = 1;时,舵机转向0°,pwm波有一个0.5ms的高电平就迅速变成低电平了。
接着执行if(cnt == 40)? 不等于,不执行,跳过,定时器依旧在计数,主函数接着初始化定时器下面的代码开始执行,jd = 1; cnt = 0; sg90 = 1;0.5ms的高电平,再执行while(1)子句,jd = 4时,cnt = 0;进入中断处理函数,这个时候,cnt++ = 1,1<4 ? 是的,1ms的高电平了,再次执行中断处理函数,cnt++ = 2,2<4 ? 是的,1.5ms的高电平了,再次执行中断处理函数,cnt++ = 3,3<4 ? 是的,2ms的高电平了,再次执行中断处理函数,cnt++ = 4,4<4 ? 不是的,2ms的高电平了。延迟2s,接着向下执行,当jd = 1; cnt = 0;时,进入中断处理函数,有0.5ms的高电平。
中断处理函数,是不断的被触发,计时器不断的在计时,溢出,计时,溢出......
主函数中的while语句也在不断的循环,不停的而变换的着角度135,0,135,0......
中断处理函数每次执行完成之后,在初始化定时器的下面接着进行代码的执行。而在执行中断处理函数的时候,主函数并不是在等待。
整个过程可以理解成:中断处理函数被触发,重新赋初值,再被触发......这是一个不断被触发的过程,但是由于,中断处理函数中只有执行的过程,没有先置条件,所以它在等主函数给它条件,它的执行才会有效,否则都是无效,只会不断的重复cnt++ =>1(从进入到中断处理函数,cnt的值就会被赋1)cnt<jd = ? 1<1 ?,(jd没有给赋初始值,所以只能听main函数的安排,1,4),在中断处理函数不断地的执行过程中jd 没有给具体的值,所以没办法判断,执行else,故sg90的pwm波一直是低电平,当计数达到20ms,也就是爆表40次之后,cnt重新赋值0,继续循环执行中断处理函数。直到,主函数给jd的值,进行判断,每当给一次角度的时候,cnt都要重新置0开始,也就是让pwm波从头开始,避免从中途改变波的高低。
4.6超声波测距
4.6.1 简介

超声波测距模块是用来测量距离的一种产品,通过发送和收超声波,利用时间差和声音传播速度, 计算出模块到前方障碍物的距离。
- 怎么让它发送波
- 怎么知道它开始发了
- 怎么知道接收了返回波
- 怎么算时间
- 怎么算距离
4.6.2 超声波的时序图



















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









