



领先的超大规模企业皆已开始部署 NVIDIA NVLink 整机架解决方案,可以通过 NVLink Fusion 在 NVIDIA 机架架构上实现异构芯片数据中心标准化,从而加快上市速度。
NVIDIA NVLink™ Fusion 可为自定义加速器或自定义 CPU 提供行业领先的 AI 性能扩展。借助强健的 NVIDIA 合作伙伴生态系统,超大规模企业可以使用 NVIDIA NVLink 和 AI 工厂技术构建通用 AI 基础设施,这些技术包括机架级扩展架构、NVIDIA GPU 或 NVIDIA Grace™ CPU、光电一体封装的硅光 (CPO) 交换机、ConnectX® SuperNIC、BlueField® DPU 和 Mission Control。

NVLink Fusion的优势
NVIDIA 展示了 NVLink Fusion 的重大突破,这是一种针对 AI 数据中心优化的技术。在 Computex 上亮相的新一代产品可实现令人印象深刻的带宽,同时促进与行业领导者的合作。详细了解这项创新对技术生态系统的影响。
NVIDIA 于 2014 年开发 NVLink,作为连接服务器和数据中心中 GPU 和其他计算元素的替代技术。与 PCI Express 不同,NVLink 连接的设备使用网状网络通信,而不是依赖中央集线器。今天,NVIDIA 为下一代 AI 数据中心推出了增强的解决方案。
NVIDIA 解释说,NVLink Switch 芯片可以在 72 加速器 NVLink 域 (NVL72) 中提供 130 TB/s 的带宽,而 NVLink-C2C 芯片到芯片互连可用于创建新的集成产品。
NVLink Fusion 预计将为芯片和 ASIC 构建商提供许多定制选项。同时,NVIDIA 通过其 Mission Control 软件组件提供高度集成的产品堆栈。借助这个统一的控制中心,企业客户可以自动执行运行现代化 AI 基础设施所需的复杂管理任务。
在今年的 Computex 上,NVIDIA 展示了其新一代 NVLink 互联技术。这项名为 NVLink Fusion 的技术旨在支持半定制的 AI 基础设施和数据中心部署。该公司已经与众多希望在其产品中采用这种新芯片的行业领导者合作。

智算中心技术架构
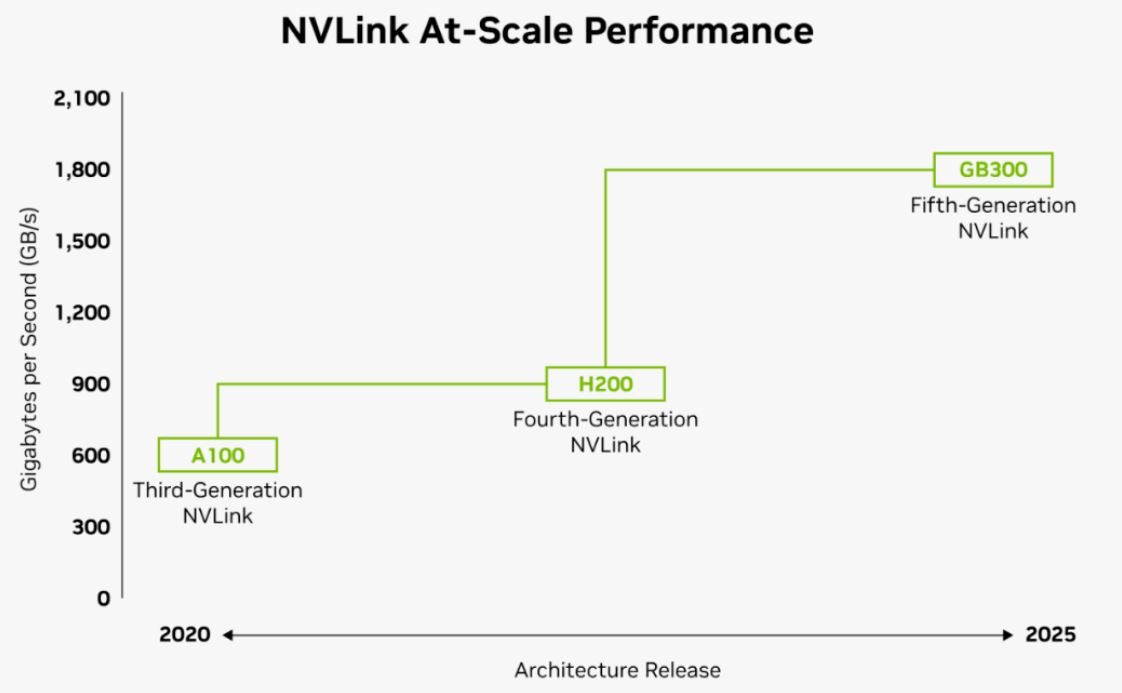
为了以节能高效的方式更大限度地提高 AI 工厂的吞吐量和性能,与新的 Blackwell Ultra GPU 一起,NVLink Fusion 是 NVIDIA “AI 工厂”愿景的关键部分。第五代 NVIDIA NVLink 平台应用于 NVIDIA Grace Blackwell 计算密集型机架:GB200 NVL72 和 GB300 NVL72。NVLink Fusion 和 NVIDIA 的专用机架相结合,为每个 GPU 提供 1.8 TB/s的总带宽,比 PCIe 5.0 快 14 倍。
“一场翻天覆地的变革正在发生:数据中心架构数十年来首度必须从根本上彻底改变—— AI 正在融入每个计算平台。NVLink Fusion 将 NVIDIA AI 平台和丰富的生态系统对外开放,助力合作伙伴构建专用 AI 基础设施。” NVIDIA 创始人兼首席执行官黄仁勋表示。

#NVIDIA #NVLink Fusion #GPU算力#数据中心#GB#Blackwell#NVL72

















 1197
1197

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









