



参考链接:
【振动中的数学——谐振频率】 https://www.bilibili.com/video/BV1dL411N7PB/?share_source=copy_web&vd_source=59b3c27bd034b606c96ffb3b7707f893
机械振动系统与RLC谐振电路的类比分析
在物理学与工程学中,看似迥异的系统——如弹簧-质量-阻尼构成的机械振动系统与由电阻(R)、电感(L)和电容(C)组成的电路——却在数学本质和动态行为上展现出惊人的相似性。这种相似性不仅体现了自然规律的统一性,也为跨领域建模与分析提供了有力工具。本文从数学模型、谐振条件、阻尼效应和工程应用四个维度,系统阐述两类系统的类比关系。
一、数学模型的对应性
两类系统均可由二阶线性常微分方程描述,具有完全相同的数学结构。
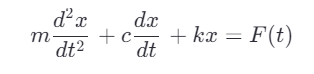
1. 机械系统(弹簧-质量-阻尼器)
考虑一个质量为 m 的物体连接在弹簧(劲度系数 k )和阻尼器(阻尼系数 c )上,受外力 F(t) 驱动,其运动方程为:
其中:
- x(t) :位移(m)
- m :质量(kg)
- c :阻尼系数(N·s/m)
- k :弹簧刚度(N/m)
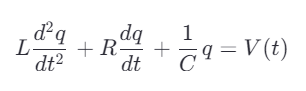
2. 电路系统(RLC串联电路)
在RLC串联电路中,设外加电压为 V(t) ,电荷量为 q(t) ,电流 i=dq/dt ,则电路方程为:
其中:
- q(t) :电荷(C)
- L :电感(H)
- R :电阻(Ω)
- C :电容(F)
3. 机电类比对应关系
|
机械系统 |
RLC电路系统 |
|---|---|
|
位移x |
电荷q |
|
速度x˙ |
电流i=q˙ |
|
质量m |
电感L |
|
阻尼系数c |
电阻R |
|
弹簧刚度k |
1/电容1/C |
|
外力F(t) |
外加电压V(t) |
由此可知,机械位移 ↔ 电荷,力 ↔ 电压,构成“力-电压类比”(也称“直接类比”)。
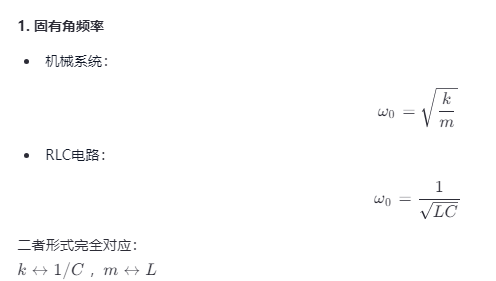
二、谐振条件的共性
两类系统在无外力(或无源)自由振动时,均存在一个固有角频率(natural angular frequency),当系统参数匹配时,能量在两种储能元件间高效交换,形成谐振。
2. 能量转换机制
-
机械系统:
动能 21mv2 与弹性势能 21kx2 周期性转换,阻尼器(如摩擦)以热能形式耗散能量。 -
RLC电路:
磁场能 21Li2 (储于电感)与电场能 21Cq2 (储于电容)交替转换,电阻以焦耳热形式耗散能量。
这种储能-释能-耗能的循环,正是两类系统产生振荡行为的物理根源。
三、阻尼效应的类比
实际系统中总存在能量损耗,导致振幅逐渐衰减。阻尼程度决定系统响应类型(欠阻尼、临界阻尼、过阻尼)。
1. 阻尼比(Damping Ratio)
两类系统均可引入无量纲阻尼比 ζ 来描述阻尼强度:
- 机械系统:
ζ=2mkc
- RLC电路:
ζ=2RLC=2R⋅ω0L1
当 ζ<1 :系统**欠阻尼**,呈现衰减振荡;
当 ζ=1 :**临界阻尼**,最快回到平衡无振荡;
当 ζ>1 :过阻尼,缓慢回归无振荡。
2. 品质因数(Q Factor)
衡量系统“选择性”或“振荡持久性”的指标:
Q=2ζ1=Δωω0
- 机械系统:高Q值表示低阻尼,振荡衰减慢(如音叉);
- 电路系统:高Q值表示窄带滤波特性(如收音机选频电路)。
四、工程应用的互通性
由于数学与物理机制的高度相似,两类系统的分析方法可相互迁移,推动跨学科技术创新。
|
应用领域 |
机械系统实例 |
电路系统实例 |
|---|---|---|
|
故障诊断 |
通过结构固有频率变化检测裂纹 |
输电线路故障定位(行波+谐振分析) |
|
滤波与选频 |
减振器设计(避开共振频率) |
RLC带通/带阻滤波器(如中频放大器) |
|
传感器与换能器 |
加速度计(质量-弹簧系统) |
振荡器、LC谐振传感器(如无线充电) |
|
能量回收 |
振动能收集装置 |
无线能量传输中的谐振耦合 |
例如,在高压输电线路中,利用线路分布参数形成的等效LC网络,其自由振荡频率可反映线路长度或故障点位置,这与机械结构中通过模态分析定位损伤的原理如出一辙。

















 9030
9030

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









