






总体需求:
因为项目需求,现在需要将一个四自由度机械臂融合到ROS智能小车上,小车是由STM32F407控制,所以现在需要将机械臂的运动控制源代码烧录到智能小车上。
准备过程:
第一步,准备好需要烧录的机械臂代码

第二步,配置好烧录软件和环境,我这里使用的是FlyMcu V0.2188
读者可根据自身工具环境选择Mcuisp或者ST-LINK软件进行烧录,烧录过程大同小异
第三步,将小车主板与电脑主机相连接,这里是通过常用的TYPE-C数据线即可链接,链接成功之后小车会自动开机,电压显示未4.23V左右电压

正式开始烧录:
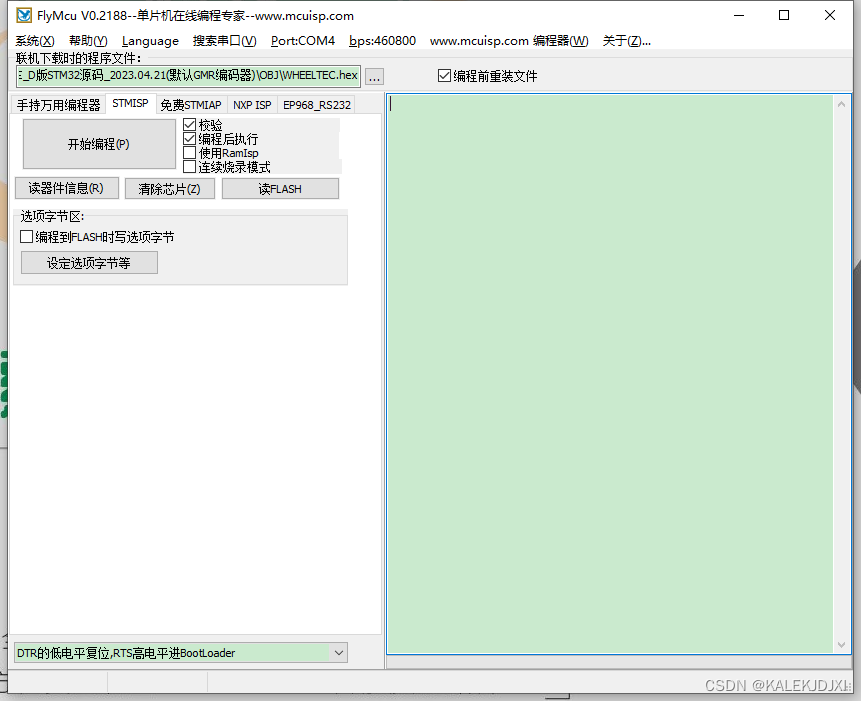
第四步,打开烧录软件,开始进行烧录
1.打开Mcuisp软件,界面如图所示:
2.选择搜索串口,在弹出的小窗口里选择合适的PORT
3.选择需要烧录的源代码
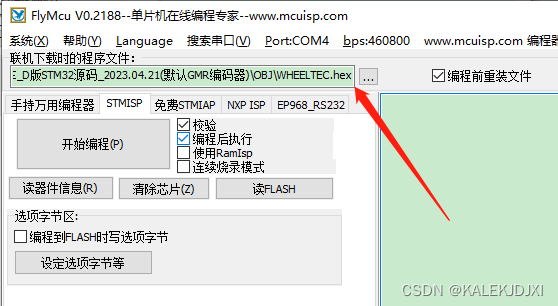
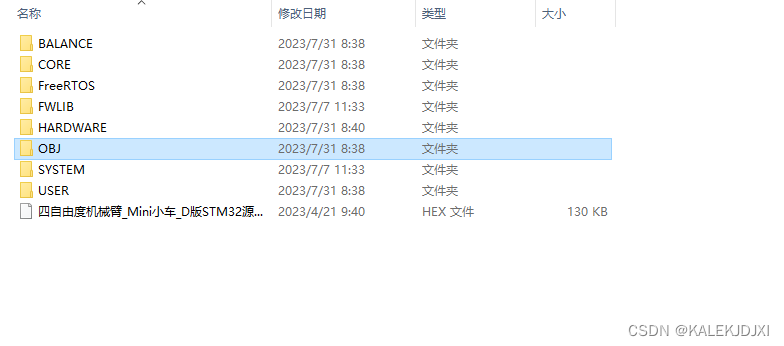
在OBJ文件中选择hex文件,点击确认
4.设置波特率、DTR低电平复位、RTS高电平进BL
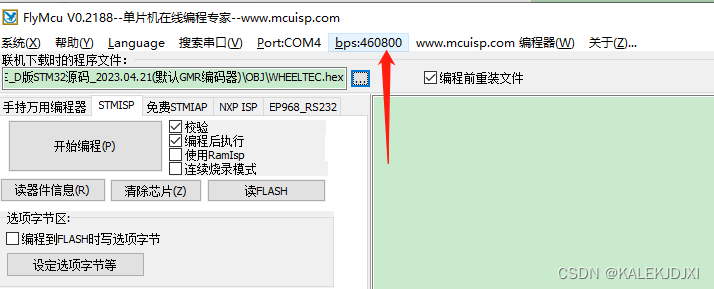
波特率越高,烧录速度越快

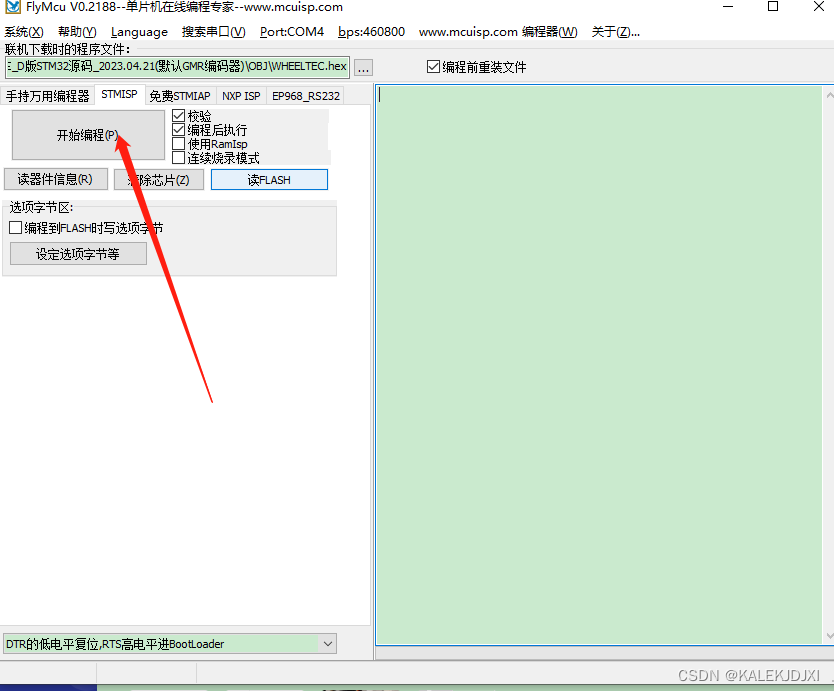
选择DTR低电平复位、RTS高电平进BootLoader
烧录成功
4.所有项目配置完成之后,点击开始编程,开始下载烧录软件
等待一段时间就显示烧录成功了,我这里等了大约30秒,提示烧录成功就可,同时在小车主控板上也会有文字提醒烧录成功。
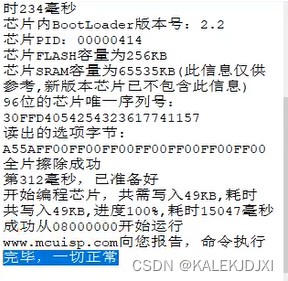
那么我们的烧录就完成了
后记:
笔者说
后续我将由一个ROS驱动的智能小车,逐步开始搭建一个功能完善的智能机器人小车,实现小车+机械臂控制实现高精度任务完成的移动机器人


















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









