




一、引言
在人工智能的蓬勃发展进程中,目标检测技术作为计算机视觉领域的关键支撑,正深刻改变着众多行业的运作模式。从熙熙攘攘街头的安防监控,到高速驰骋路上的自动驾驶,从井然有序工厂的工业自动化,再到充满奇幻色彩的增强现实,目标检测无处不在,发挥着至关重要的作用。
YOLO(You Only Look Once)系列算法,作为目标检测领域的璀璨明星,自诞生以来便以其高效、实时的卓越性能备受瞩目。从 2015 年 YOLOv1 的惊艳亮相,首次实现实时检测,打破传统目标检测算法的桎梏,到后续多个版本的持续迭代优化,不断提升检测精度与速度,YOLO 系列始终引领着目标检测技术的发展潮流。如今,YOLOv10 的横空出世,更是为这一领域注入了全新的活力,开启了万物识别的崭新时代。
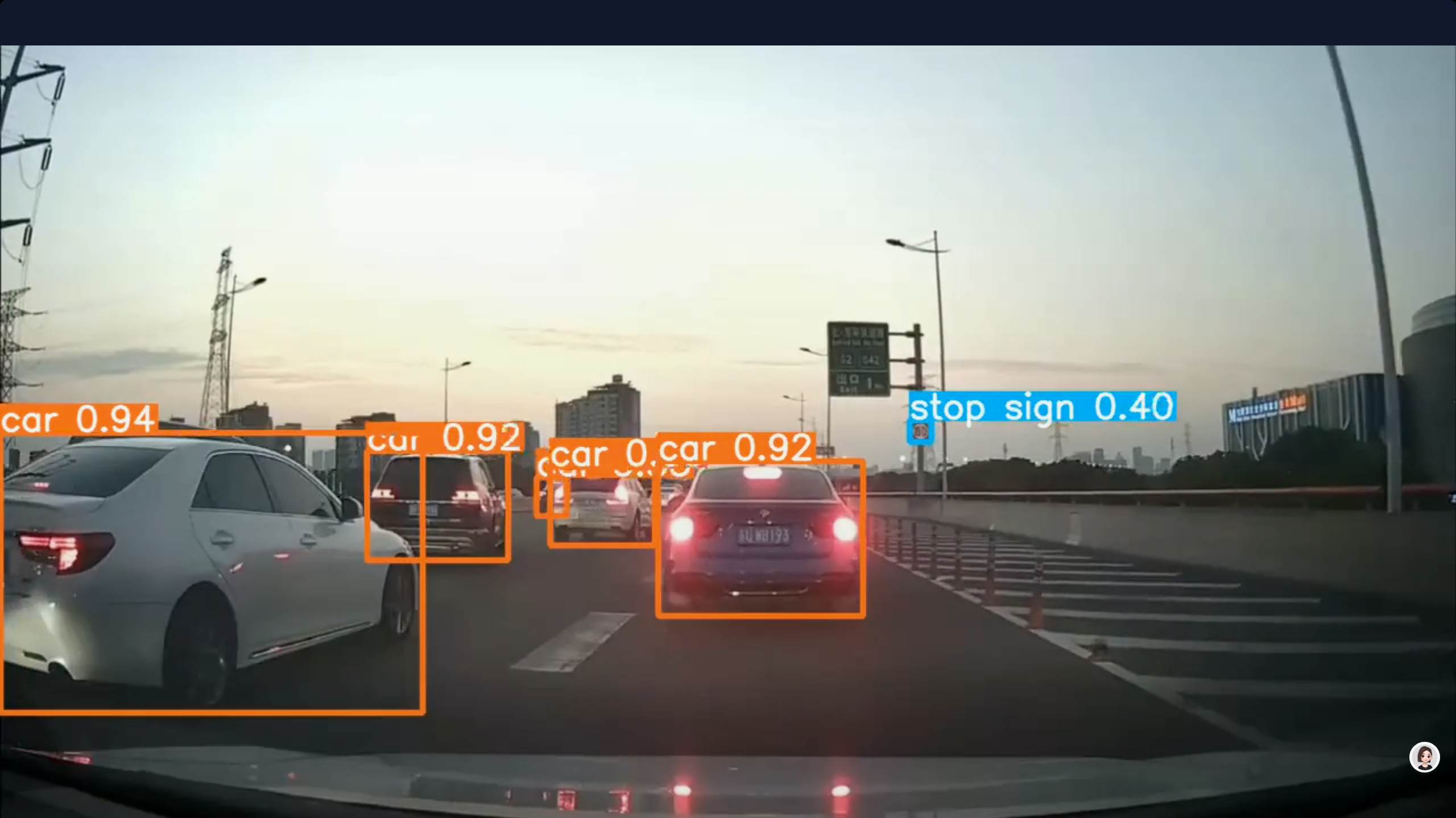
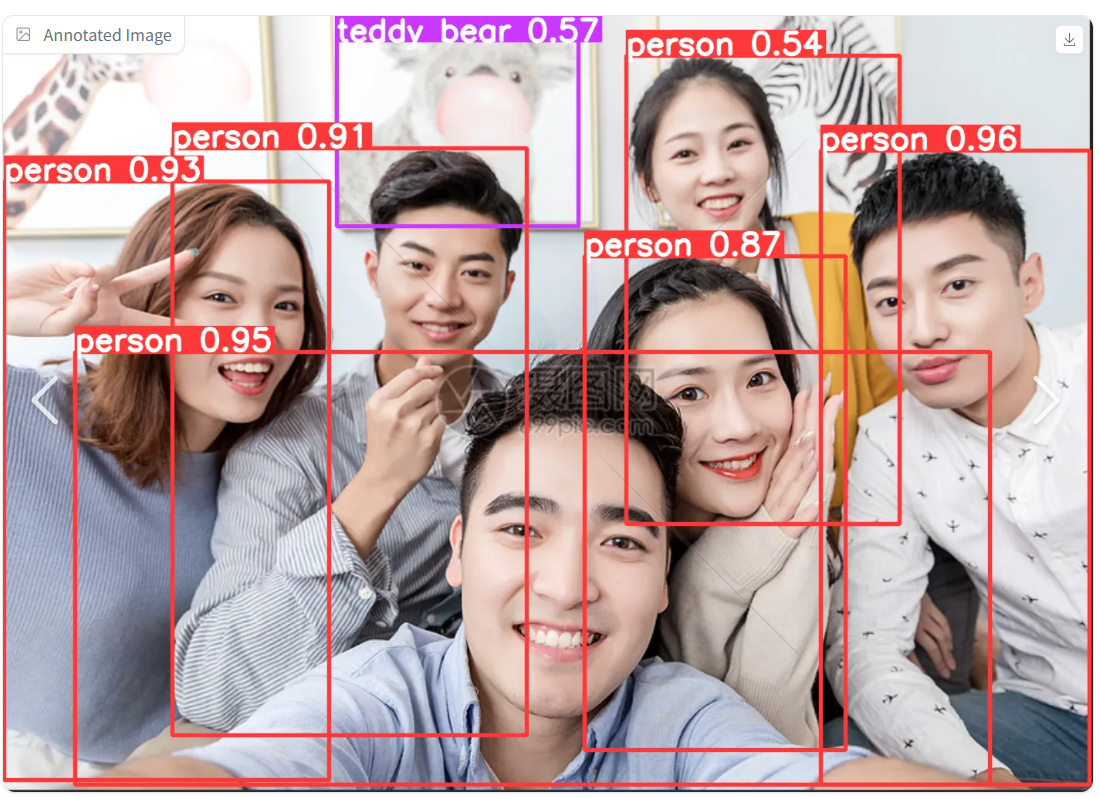
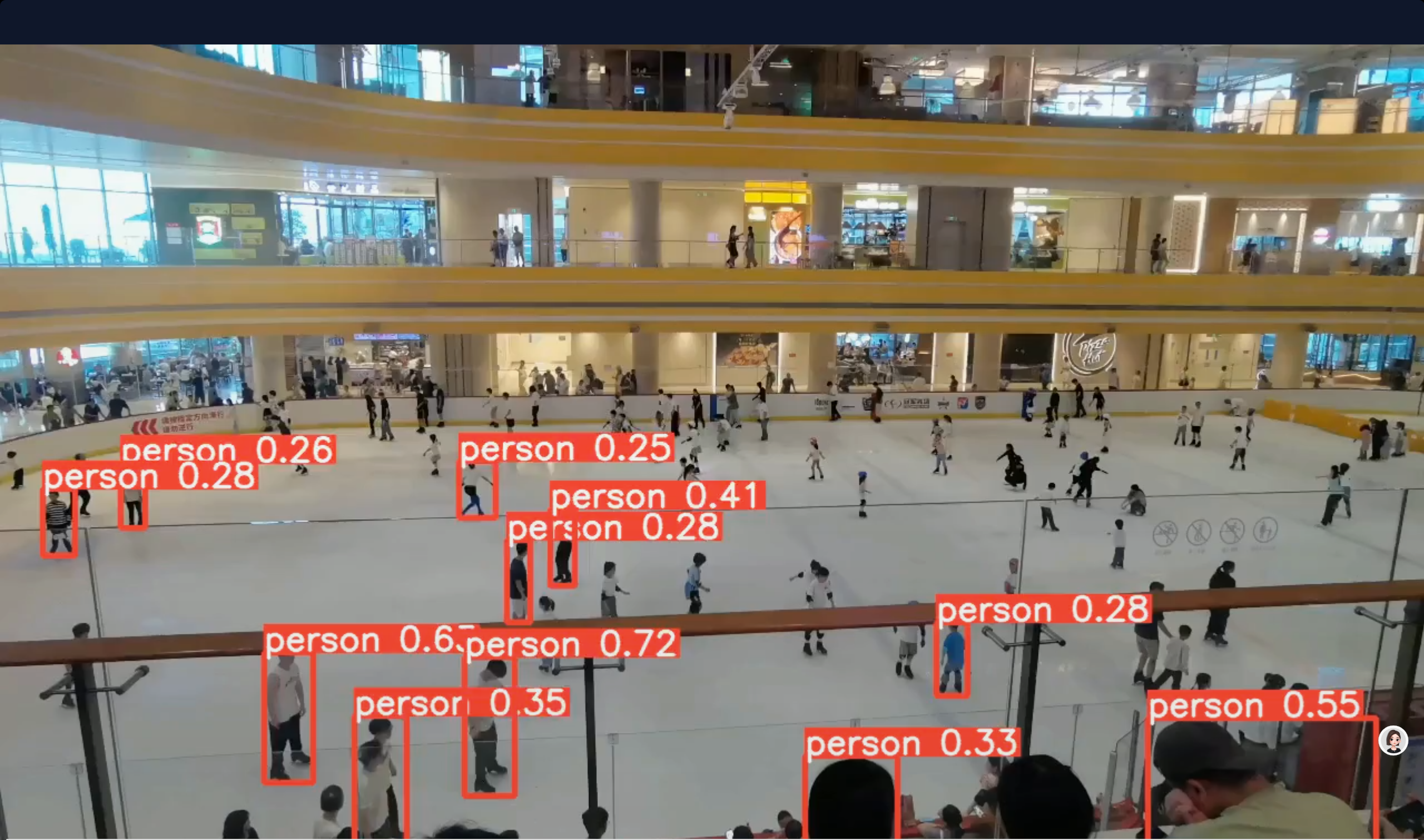
YOLOv10 由清华大学(THU-MIG)团队精心打造,是 YOLO 系列的集大成者。它在继承前代优秀基因的基础上,实现了诸多技术突破与创新,不仅在保持高检测精度的同时,显著降低了计算成本和推理延迟,更通过独特的设计理念和先进的技术架构,具备了识别汽车、路标、水杯等各类物体的强大能力,为众多应用场景提供了更为强大、高效的解决方案。
实际效果:

二、YOLOV10 技术剖析
2.1 核心技术突破
2.1.1 NMS-free 训练
在传统的目标检测算法中,非极大值抑制(NMS)是后处理阶段的关键步骤,用于去除冗余的检测框,保留最具代表性的目标检测结果。然而,NMS 的使用增加了推理过程的复杂性和延迟,阻碍了模型的端到端部署。YOLOv10 创新性地引入了一致的双重分配机制,彻底摒弃了对 NMS 的依赖。在训练过程中,通过精心设计的算法策略,使得模型能够直接学习到最优的目标检测结果,无需在推理时借助 NMS 进行额外处理。这一突破性的改进,不仅极大地简化了推理流程,还显著降低了推理延迟,使得 YOLOv10 能够在实时性要求极高的应用场景中大放异彩。
2.1.2 整体效率 - 精度驱动模型设计策略
YOLOv10 秉持整体效率 - 精度驱动的模型设计理念,从效率和精度两个维度对模型架构进行了全面而深入的优化。在效率方面,研究团队提出了轻量级分类 head、空间通道(spatial-channel)解耦下采样和排序指导的块设计等创新方法,有效减少了模型中的计算冗余,使模型架构更加高效紧凑。这些优化措施在大幅降低模型参数数量和计算量(FLOPs)的同时,保持了模型的检测性能,
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章


















 1万+
1万+

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









