




1. 【Autonomous Driving】PC-NeRF: Parent-Child Neural Radiance Fields Using Sparse LiDAR Frames in Autonomous Driving Environments
【自动驾驶】PC-NeRF:自动驾驶环境中使用稀疏 LiDAR 帧的父子神经辐射场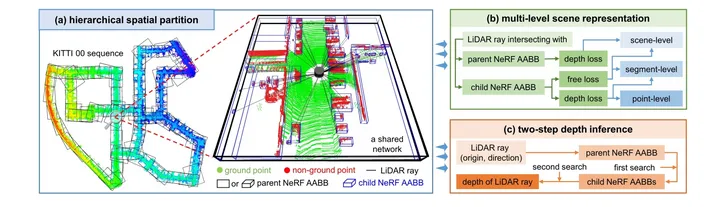
作者:Xiuzhong Hu, Guangming Xiong, Zheng Zang, Peng Jia, Yuxuan Han, Junyi Ma
中文摘要:
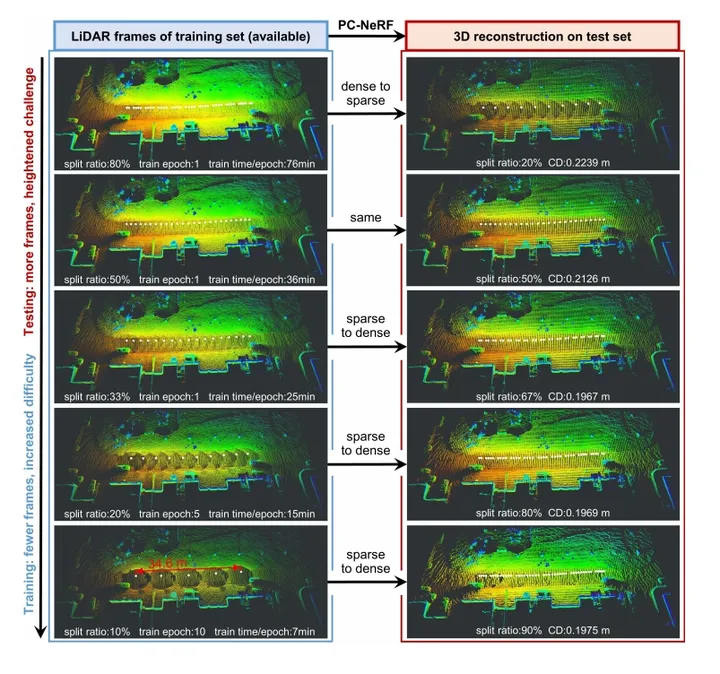
大规模 3D 场景重建和新颖的视图合成对于自动驾驶汽车至关重要,尤其是利用时间稀疏的 LiDAR 帧。 然而,传统的显式表示仍然是以无限分辨率表示重建和合成场景的重大瓶颈。 尽管最近开发的神经辐射场 (NeRF) 在隐式表示方面显示出了引人注目的结果,但使用稀疏 LiDAR 帧进行大规模 3D 场景重建和新颖视图合成的问题仍未得到探索。 为了弥补这一差距,我们提出了一种 3D 场景重建和新颖的视图合成框架,称为父子神经辐射场 (PC-NeRF)。 该框架基于父NeRF和子NeRF两个模块,实现了层次空间分区和多级场景表示,包括场景、片段和点级别。 多级场景表示增强了稀疏激光雷达点云数据的有效利用,并能够快速获取近似体积场景表示。 经过大量实验,PC-NeRF被证明可以在大规模场景中实现高精度新颖的LiDAR视图合成和3D重建。 此外,PC-NeRF 可以有效处理稀疏 LiDAR 帧的情况,并在有限的训练周期内展现出较高的部署效率。
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章


















 1483
1483

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









