




打造具备“灵魂”的智能小车:基于树莓派与Qwen3的工程化实践
报告日期:2025年6月17日
项目目标:打造具备“灵魂”的智能小车
本项目的核心目标是利用工程化的开发方法,构建一台具备高级智能交互能力的智能小车。它不仅仅是一个遥控或简单避障的机器人,更追求一种“灵魂感”,使其能够与用户进行自然、富有情感的多模态交互,并具备一定的自主性和个性化特征。
核心功能需求概述:
- 多模态交互能力: 实现小车能听懂语音指令、能用自然语言回应、能通过摄像头理解环境和识别特定人脸。
- 智能化核心: 构建长期记忆系统,记录交互历史与关键信息;塑造可定制的个性化引擎,使小车行为和回应更具“性格”。
- 环境感知与主动性: 监测天气、温湿度、自身电池电量等状态,基于这些信息调整“心情”并通过语音主动提醒用户。
- 高级视觉功能: 准确识别人脸,并能主动跟随指定目标。
- 高度自主性: 在电量不足时能自动寻找并返回充电基座进行充电。
- 技术实现路径: 采用工程化的开发方法,以树莓派作为主控制器,核心智能依赖Qwen3等多模态大模型API的调用,并评估K230机器视觉开发板在特定任务上的应用潜力。
一、整体架构设计方案
构建一个具备“灵魂”的智能小车,其整体架构设计至关重要。这不仅涉及到硬件组件的协同工作,更关乎软件层面的逻辑流程、数据处理以及与云端智能的交互。本方案旨在提供一个清晰、模块化且可扩展的架构蓝图。
1.1 系统逻辑架构图 (示意)
+--------------------------+ +---------------------------------+ +--------------------------+
| 传感器输入与感知层 |<---->| 树莓派 (核心控制与决策) |<---->| Qwen3等多模态云脑 |
| (摄像头, 麦克风阵列, | | (Python主程序, 状态机, 任务调度,| | (语音识别, 语义理解, |
| 环境传感器[温湿度/光照],| | 记忆/个性模块, K230通信接口, | | 图像分析, 文本生成, |
| 电源管理[INA219], | | 运动控制算法, 回充导航逻辑) | | 语音合成, 思考模式) |
| 充电坞对接传感器) | +----------------+----------------+ +--------------------------+
+--------------------------+ |
| (可选: 视觉协处理)
|
+-------------+--------------+
| K230 机器视觉开发板 |
| (人脸检测/识别加速, |
| 特定目标跟踪算法) |
+-------------+--------------+
|
| (控制/状态信号)
|
+--------------------------+ +----------------+----------------+ +--------------------------+
| 执行器与输出表现层 |<---->| 运动与电源子系统 (小车底盘) |<---->| 充电坞对接模块 |
| (扬声器, [可选]表情显示, | | (电机及驱动器, 电池, | | (导航信标[IR/AprilTag], |
| 车身灯光反馈) | | 电源管理与充电控制电路) | | 物理充电接口[Pogo Pin]) |
+--------------------------+ +---------------------------------+ +--------------------------+
该架构图展示了系统的主要组成部分及其相互关系。传感器层负责收集环境和自身状态信息;树莓派作为核心控制器,运行主程序,处理本地任务,并与云端AI和可选的K230协处理器通信;Qwen3等云端大模型提供高级智能处理能力;执行器层负责将决策转化为物理动作和交互反馈;运动与电源子系统提供动力和能源管理;充电坞模块则支持小车的自主充电功能。
1.2 关键设计考量点
在设计整个系统时,需要权衡多个关键因素,这些因素将直接影响后续的硬件选型和软件实现策略。深入理解并妥善处理这些考量点,是项目成功的基石。
模块化与解耦
软件层面:为了应对系统的复杂性并提高可维护性,软件设计应遵循模块化原则。将感知(如音频处理、视觉处理)、决策(如指令解析、行为选择)、执行(如运动控制)、记忆管理、个性化引擎以及与外部API(如Qwen3、K230)的交互等功能划分为独立的Python模块或类。例如,可以定义AudioProcessor, VisionProcessor, MotionController, MemoryManager, PersonalityEngine, QwenAPIHandler等。这样做的好处是降低了模块间的耦合度,使得每个模块可以独立开发、测试和升级。当某个模块需要修改或替换时,对系统其他部分的影响可以降到最低。
硬件层面:传感器和执行器的接口应尽可能标准化。例如,优先选用具有通用接口(如I2C, SPI, USB)的传感器,避免使用过于专有或难以替代的硬件。这为未来升级或替换硬件组件提供了便利,例如,如果发现当前摄像头性能不足,可以更容易地替换为更高规格的型号,而无需大规模修改软件接口。
实时性与响应速度
语音交互延迟:用户体验在很大程度上取决于语音交互的流畅性。从用户发出语音指令到小车做出响应的整个链路延迟需要严格控制。一个可接受的目标是:对于简单指令(如“前进”),响应时间应小于1秒;对于需要云端大模型参与的复杂对话,响应时间争取控制在3秒以内。主要的延迟瓶颈在于语音识别(STT)API的调用、网络传输以及大语言模型(LLM)的推理时间。优化策略可以包括使用高效的STT服务、保证稳定的网络连接、选择响应速度较快的LLM模型或API节点,以及采用流式TTS输出以减少感知延迟。
视觉跟踪实时性:人脸识别与跟随功能对实时性要求极高,需要保证足够的处理帧率(如10-15 FPS以上)和较低的单帧处理延迟。这直接影响跟随的平滑度和准确性。需要仔细评估树莓派自身的CPU处理能力。如果仅靠树莓派难以满足要求,引入K230这样的视觉协处理器就显得非常必要,它可以分担计算密集型的视觉算法,如人脸检测和跟踪。
并发处理:智能小车在运行过程中需要同时处理多种任务,例如,在与用户进行语音交互的同时,可能还需要感知周围环境以避障,或者在执行跟随任务时监测电池电量。因此,系统必须具备并发处理能力。在Python中,可以利用asyncio库进行异步编程,或者使用多线程(threading模块)来处理并发任务,确保各项功能能够并行执行而不会相互阻塞,从而提高系统的整体响应效率。
云端API依赖与边缘计算平衡
必须依赖云端:对于本项目中追求的“灵魂感”,许多核心智能功能目前难以完全在边缘设备上实现。这包括:
- 复杂的自然语言理解(NLU)和多轮对话管理。
- 基于大规模知识库的问答。
- 高质量、自然流畅的语音合成(TTS)。
- 基于大模型的图像内容理解,例如Qwen3的视觉问答(VQA)能力,能够理解图片内容并回答相关问题。
这些任务通常需要强大的计算资源和庞大的模型参数,目前最经济有效的方式是调用云端API。
可边缘/本地处理:为了提高响应速度、降低网络依赖和成本,部分任务可以在边缘设备(树莓派或K230)上处理:
- 基础的人脸检测(而非复杂的人脸识别比对)。
- 简单的物体跟踪算法(如基于颜色、形状或运动的跟踪)。
- 环境传感器数据的直接读取和初步处理。
- 电机的底层控制逻辑和PID算法。
- 充电坞对接的末端引导,如基于红外传感器的精确对准或简单的视觉标记识别。
K230视觉协处理器在这些边缘视觉任务中能发挥重要作用,提供硬件加速。
离线策略:考虑到网络连接可能不稳定或不可用,系统应设计一定的离线运行策略。例如,在网络断开时,小车应能执行预设的本地指令(如简单的语音关键词控制移动)、基本的避障行为,或者进入低功耗待机模式,并尝试重新连接网络。这能提升用户体验和系统的鲁棒性。
数据流与状态管理
核心数据流:必须清晰地定义系统中数据的流动路径。传感器数据(如摄像头图像、麦克风音频、环境读数)如何被采集、进行必要的预处理(如降噪、格式转换),然后如何传输给决策模块(本地运行在树莓派上的逻辑,或发送给云端Qwen3 API)。同样,决策模块产生的指令(如运动指令、语音回复文本)如何驱动相应的执行器(电机、扬声器)也需要明确。数据格式、传输协议(如内部模块间调用、与K230的TCP/IP通信、与云API的HTTPS请求)都需要规范化。
小车状态机:为了有效管理小车的复杂行为和模式切换,应设计一个明确的状态机。状态可以包括:空闲(Idle)、聆听(Listening)、思考(Thinking/Processing)、回应(Responding)、跟随(Following)、导航至充电坞(NavigatingToCharger)、充电中(Charging)、异常(Error)等。每个状态下允许的行为和可转换到的其他状态,以及触发状态转换的条件(如用户指令、传感器事件、内部逻辑判断)都需要详细定义。状态机有助于使小车行为逻辑清晰、可预测且易于调试。
功耗管理
对于依赖电池供电的移动机器人而言,功耗管理是决定其实用性和续航能力的关键。需要系统性地分析各个硬件组件(树莓派主板、K230、传感器、电机、显示屏等)的功耗特性。在软件层面,应优化算法以减少不必要的计算;选择低功耗的硬件组件;并设计有效的休眠和唤醒策略。例如,在小车长时间处于空闲状态时,可以降低CPU频率、关闭部分非必要的传感器或外设,甚至让K230进入低功耗模式,以延长电池使用时间。
安全性与鲁棒性
系统的安全性和鲁棒性直接关系到用户体验和设备的可靠运行。需要考虑的方面包括:
- API调用失败处理:网络请求可能因各种原因失败(超时、服务器错误、鉴权失败等)。代码中必须包含对API调用的错误捕获和重试机制,以及在多次失败后的降级处理逻辑(如切换到本地功能或提示用户网络问题)。
- 传感器异常检测:传感器可能损坏或读数异常。系统应能检测到这些异常情况(如读取超时、数值超出合理范围),并采取相应措施(如忽略该传感器数据、报警提示、切换到备用逻辑)。
- 运动控制中的安全保护:在小车移动过程中,应有基本的碰撞检测机制(如通过超声波传感器或视觉判断)。在检测到障碍物或潜在碰撞风险时,应能及时停止或调整路径。电机控制也应有防堵转、过流保护等措施。
可扩展性与可维护性
考虑到技术的发展和未来可能的需求变更,系统设计应具备良好的可扩展性。这包括在软件层面预留接口和钩子(hooks),方便未来添加新的传感器、执行器或AI功能模块。例如,可以设计一个插件式的传感器管理系统,或者一个通用的任务调度框架。
同时,清晰的代码结构、详尽的注释和完善的文档对于项目的长期可维护性至关重要。遵循良好的编程规范,使用版本控制系统(如Git),并定期进行代码审查,都有助于提高代码质量和团队协作效率。
二、硬件选型清单与配置指南
为实现智能小车的各项功能,硬件选型是至关重要的一步。本章节将详细介绍各核心组件的推荐型号、选型理由以及基础的配置方法。
2.1 主控制器 (树莓派)
树莓派作为小车的大脑,负责运行主控制程序、处理传感器数据、与云端API通信以及协调各个硬件模块的工作。
型号推荐与核心考量
推荐选用 Raspberry Pi 5 (4GB或8GB RAM) 或 Raspberry Pi 4B (8GB RAM)。
- Raspberry Pi 5 理由:
- 更强的CPU性能: 对于运行Python主程序、多线程/异步任务、可能的本地轻量级AI模型预处理或后处理、以及未来部署更复杂边缘AI应用更为有利。
- PCIe接口: 提供了外接AI加速卡(如Google Coral M.2 Accelerator)的可能性,为未来性能升级预留了空间。参考资料中提及 Raspberry Pi 5在计算机视觉方面的提升,其PCIe接口可用于AI加速。
- 双CSI接口: 如果项目未来需要双目视觉(如深度感知)或连接多个摄像头,Pi 5提供了原生支持。
- Raspberry Pi 4B (8GB RAM) 理由:
- 性价比高: 对于主要依赖云端API进行智能处理的项目,Pi 4B的性能已足够应对本地的控制和数据流转任务。
- 社区支持成熟: 拥有庞大的用户群体和丰富的教程资源,遇到问题更容易找到解决方案。
- 功耗相对较低: 在同等负载下,可能比Pi 5略低,对电池续航有一定益处。
选型核心考量因素:
- 处理能力 (CPU/RAM): 需满足运行Python主程序、并发任务(如传感器数据处理、API通信、运动控制)、状态机管理等需求。8GB RAM能提供更充裕的内存空间,尤其是在处理图像数据或运行多个后台服务时。
- 接口丰富度: 需要足够的USB接口(连接麦克风、扬声器、[可选]其他外设如K230的USB转串口)、CSI接口(连接摄像头)、GPIO引脚(控制电机驱动、读取部分传感器)、以及I2C/SPI总线(连接多种传感器模块、电源管理模块)。
- 软件生态与社区支持: 树莓派拥有极其活跃的社区和完善的软件生态,包括大量的Python库、操作系统支持和问题解决方案,这极大降低了开发门槛。
- 功耗: 需结合选用的电池容量和期望的续航时间进行综合考虑。
操作系统与基础配置
操作系统推荐: Raspberry Pi OS (64-bit, Bookworm推荐)。
- 理由: 官方操作系统,对硬件的兼容性和支持最佳。64位系统能够更好地利用4GB及以上的内存,对于性能要求较高的应用更为合适。Bookworm是较新的稳定版本,通常包含最新的内核和软件包。
基础配置步骤:
- 烧录系统: 使用 Raspberry Pi Imager 将最新版的Raspberry Pi OS (64-bit)烧录到一张高质量的MicroSD卡(至少32GB,速度等级Class 10/U1 A1或更高)。
- 首次启动配置: 连接显示器、键盘鼠标,完成首次启动向导,包括设置用户名、密码、连接Wi-Fi网络、选择时区和键盘布局。
- 启用接口: 打开终端,运行
sudo raspi-config。在菜单中:Interface Options-> 启用SSH(用于远程命令行访问)。Interface Options-> 启用VNC(可选,用于图形界面远程访问)。Interface Options-> 启用I2C,SPI,Serial Port(根据所选传感器和模块需求启用)。Interface Options-> 启用Camera(连接摄像头后启用)。
- 系统更新与升级: 执行以下命令以确保系统和软件包是最新版本:
sudo apt update && sudo apt full-upgrade -y - 安装核心开发工具: 安装Python包管理器、虚拟环境工具、Git以及一些编译和音频处理所需的库:
(sudo apt install -y python3-pip python3-venv git build-essential libasound2-dev libportaudio2 portaudio19-dev libatlas-base-dev libopenjp2-7 libtiff5libasound2-dev,portaudio19-dev用于音频处理库如PyAudio;libatlas-base-dev可能是一些科学计算库的依赖;libopenjp2-7,libtiff5是OpenCV的常见依赖)。 - 创建Python虚拟环境: 为了项目依赖隔离,强烈建议使用虚拟环境:
之后所有Python包的安装 (python3 -m venv ~/smartcar_env source ~/smartcar_env/bin/activatepip install ...) 都在激活虚拟环境后进行。
2.2 多模态大模型API (Qwen3等)
Qwen3系列大模型是实现小车“灵魂”的关键,其强大的多模态理解和生成能力将赋予小车听、说、看、思的核心智能。
API服务商与认证
API服务商:
- 阿里云百炼 (Model Studio): 提供了通义千问系列模型的API服务,包括Qwen-VL(视觉语言模型)、Qwen-Audio(音频理解与生成)、以及最新的Qwen3系列。文档和SDK支持相对完善,适合国内开发者。参考资料中提及 通义千问API参考。
- NVIDIA NIM (NVIDIA Inference Microservices): 为企业级部署提供了Qwen3等模型的微服务。如果考虑本地化部署或对性能有极致要求,可以关注NIM方案,但通常其部署和使用门槛较高。
- 其他可能提供Qwen3系列模型API的第三方云服务商。
选择考量: API的稳定性、调用成本(QPS限制、计费方式)、文档和SDK的完善程度、多模态支持的具体细节(如支持的音频输入格式、图像分辨率限制、响应延迟等)以及是否提供OpenAI兼容的API接口(便于使用现有生态工具如LangChain)。
API Endpoint URL (以阿里云百炼OpenAI兼容模式为例):
https://dashscope.aliyuncs.com/compatible-mode/v1/chat/completions
也可能使用DashScope的原生API Endpoint,具体需查阅 阿里云官方文档。
认证方式: 通常使用 API Key。例如,阿里云百炼使用 DASHSCOPE_API_KEY。此密钥非常重要,应通过环境变量或安全的配置文件进行管理,避免硬编码到代码中。
关键API调用参数 (基于Qwen3多模态能力)
以下参数主要参考阿里云百炼提供的Qwen API文档,特别是其OpenAI兼容模式。具体参数和取值可能随API版本更新而变化,务必以最新官方文档为准。
- 模型ID (
model):- 文本与视觉理解: 如
qwen-vl-plus,qwen-vl-max(支持图像输入和文本输出)。 - 通用对话与文本生成: 如
qwen-plus,qwen-max,qwen-turbo(纯文本输入输出)。 - Qwen3系列特定模型:如果API支持直接指定,例如
qwen3-8b-instruct或其他Qwen3变体。 - Qwen-Omni:这是一个强大的多模态模型,能够处理文本、图像、音频输入,并生成文本、音频输出。如果需要小车直接生成语音回复而不仅仅是文本,Qwen-Omni可能是理想选择。根据 阿里云文档,Qwen-Omni支持多种输入类型如 "text", "image_url", "input_audio"。
- 文本与视觉理解: 如
- 输入消息 (
messages) 格式 (OpenAI兼容模式):[ {"role": "system", "content": "你是一个富有情感和个性的智能小车助手。你的名字叫小Q。你当前的心情是[愉快]。"}, {"role": "user", "content": [ {"type": "text", "text": "小Q,现在外面天气怎么样?我的电量还剩多少呀?"}, // 如果有图像输入 (例如,用户展示了一张图片问这是什么) // {"type": "image_url", "image_url": {"url": "data:image/jpeg;base64,/9j/4AAQSkZJRgABA..."}}, // Base64编码的图片 // {"type": "image_url", "image_url": {"url": "https://example.com/image.jpg"}}, // 图片URL // 如果有音频输入 (例如,用户播放了一段环境声音问是什么) - 需查阅Qwen API是否直接支持在messages中嵌入音频, // 或是否需要通过专门的音频处理API先转为文本或特征。 // Qwen-Omni模型可能支持 "input_audio" 类型。 ]} ] - Qwen3特定参数 (可能在
extra_body或特定SDK参数中,参考 阿里云文档):enable_thinking:True或False。设置为True时,Qwen3模型会在生成回复前进行内部的“思考”步骤,这对于处理复杂问题、进行推理或生成更具深度的内容有帮助,但可能会增加响应时间。对于需要快速响应的简单交互,可以设为False。开源版Qwen3默认可能为True,商业版默认为False,需注意。stream:True或False。设置为True时,API会以流式方式返回数据,这对于语音交互非常重要,因为可以边接收文本片段边进行TTS转换并播放,显著改善用户体验。Qwen3商业版(思考模式)、开源版等可能只支持流式输出。
- 任务类型隐式定义: 通过精心设计的
prompt(在messages中的system和user内容)以及输入数据的组合来引导模型执行特定任务。- 语音转文字 (STT): 通常会使用专门的STT API服务(如阿里云的语音服务,或Qwen-Audio的STT能力)。将录制的音频数据发送给STT API,获取转录文本。
- 文字转语音 (TTS): 将LLM生成的文本发送给TTS API(如阿里云的语音合成服务,或Qwen-Audio的TTS能力,或Qwen-Omni的音频输出能力)。选择合适的音色(voice)和语速等参数。
- 视觉问答 (VQA): 在
messages中同时提供图像(image_url)和针对图像的问题文本(text),模型(如qwen-vl-plus)会理解图像内容并回答问题。 - 文本生成/对话: 提供纯文本的
prompt,模型会根据上下文生成连贯的回复。
- 多模态输入组合: 明确API如何接收同时包含文本、图像(URL或Base64编码)、音频(URL或Base64编码)的输入。LangChain等框架提供了标准化的方式来构建这类多模态输入。Qwen-Omni模型是处理此类复杂输入的理想选择,其API文档会详细说明各种
type(如text,image_url,input_audio,video_url)的用法。
正确配置和调用这些API是实现小车智能交互的核心。开发过程中需要仔细阅读并遵循API提供商的最新文档,注意API的速率限制、并发请求数以及费用等问题。
2.3 传感器模块
传感器是小车感知世界的窗口,为各项智能化功能提供原始数据。下表列出了针对本项目各项感知功能的推荐传感器型号、接口类型、连接方式以及关键驱动/库。
| 功能 | 推荐组件型号 | 接口类型 | 树莓派连接引脚/方式 | 关键驱动/库安装命令 (示例) | 选型理由与备注 |
|---|---|---|---|---|---|
| 听 (麦克风) | ReSpeaker 2-Mics Pi HAT / 高品质USB麦克风 (如 Blue Yeti Nano Mini, Anker PowerConf S3) / I2S MEMS 麦克风 (如 SPH0645LM4H, INMP441) |
HAT / USB / I2S | HAT直接插接 / Any_USB_Port / I2S_Pins (DIN, BCLK, LRCLK, typically GPIO18-21) |
seeed-voicecard (ReSpeaker驱动) / sudo apt install alsa-utils pulseaudio (USB麦克风通常免驱) / pip install adafruit-circuitpython-i2s (需配置内核模块) |
HAT: 集成度高,通常带DSP,易于使用。USB: 即插即用,驱动简单,音质普遍较好,选择时注意信噪比和灵敏度。I2S: 数字接口,音质好,体积小,但配置略复杂,需要树莓派内核支持。选择时综合考虑音质需求、易用性、成本和空间。 |
| 看 (摄像头) | Raspberry Pi Camera Module 3 (标准或广角) / Arducam IMX519 16MP Autofocus Camera for Raspberry Pi |
CSI | Camera_CSI_Port (树莓派主板上的CSI接口) |
通过 sudo raspi-config 启用摄像头接口, 使用 libcamera-apps (命令行工具) 或 picamera2 (Python库) 进行编程。 |
RPi Cam Mod 3: 官方支持好,性能均衡,有标准视角和广角可选,支持HDR。Arducam IMX519: 更高像素(16MP),支持自动对焦,画质更佳,但价格稍高。选择时考虑视场角需求(广角适合导航和环境感知)、分辨率、低光性能和是否需要自动对焦。 |
| 温湿度 | Adafruit BME280 / DHT22 (AM2302) |
I2C / GPIO (Single-wire) | I2C_SDA_SCL (GPIO2, GPIO3) / Any_Digital_GPIO_Pin |
pip install adafruit-circuitpython-bme280 / pip install Adafruit_DHT |
BME280: 精度较高,同时测量温度、湿度和气压,I2C接口稳定。DHT22: 性价比高,但精度和响应速度略逊于BME280,单总线协议对时序要求较高。本项目中,BME280是更稳妥的选择。 |
| 光照强度 | Adafruit BH1750 / VEML7700 |
I2C | I2C_SDA_SCL |
pip install adafruit-circuitpython-bh1750 / pip install adafruit-circuitpython-veml7700 |
数字输出,简单易用,用于测量环境光强度,可辅助判断白天/黑夜,或作为调整小车“心情”的输入之一。VEML7700动态范围更广。 |
| 电池电量监测 | Adafruit INA219 Current Sensor Breakout / Waveshare UPS HAT (带I2C监测功能) / MAX17048 LiPo Fuel Gauge |
I2C / HAT | I2C_SDA_SCL / HAT直接集成 |
pip install adafruit-circuitpython-ina219 / 特定HAT的SDK或示例代码 / pip install adafruit-circuitpython-max1704x |
INA219: 精确测量电池的电压、电流(充放电)、功率,通过积分计算消耗电量,从而估算剩余电量百分比。UPS HAT: 通常集成了充放电管理电路和电量监测芯片(如MAX1704x系列),通过I2C读取电量,更为便捷。MAX17048: 专用的电量计芯片,算法更成熟。 |
| 充电坞对接 | IR对管 (发射/接收,如TCRT5000模块) / 小型摄像头 (用于AprilTag/QR码识别,可复用主摄像头或增加一个低成本USB摄像头) / 霍尔传感器 + 磁铁 (用于精确对位) |
GPIO / CSI/USB / GPIO | Digital_GPIO_Pins (IR) / Existing_Camera_or_Dedicated_USB_Cam / Digital_GPIO_Pin (霍尔) |
RPi.GPIO / OpenCV, pupil-apriltags (Python库) / RPi.GPIO |
根据自主回充方案选择。IR对管: 简单,成本低,用于近距离检测和对准。摄像头+视觉标签: 定位精度较高,但计算量大,对光照敏感。霍尔传感器: 与磁铁配合,可实现非常精确的最终对接确认。通常组合使用。 |
2.4 执行器模块
执行器负责将小车的决策转化为实际的动作和表达。这包括驱动小车移动的电机、发出声音的扬声器,以及可选的表情显示和灯光效果。

Adeept Mars Rover PiCar-B智能机器人小车,展示了典型的四轮底盘、传感器和树莓派集成设计
| 功能 | 推荐组件型号 | 接口类型 | 树莓派连接引脚/方式 | 关键驱动/库安装命令 (示例) | 选型理由与备注 |
|---|---|---|---|---|---|
| 说 (扬声器) | 小型USB音箱 / PAM8403 Mini 5V Digital Amplifier Module + 3W 4Ω 扬声器 / Adafruit I2S 3W Stereo Speaker Bonnet for Raspberry Pi |
USB / GPIO(PWM/Analog-like from DAC) / I2S | Any_USB_Port / 树莓派3.5mm音频口或外接DAC的GPIO / I2S_Pins (DOUT, BCLK, LRCLK, typically GPIO18-21) |
aplay (命令行播放) / pygame.mixer (Python库) / adafruit-circuitpython-i2s (需配置) |
USB音箱: 最简单方便,即插即用。PAM8403: 性价比高的小型D类功放模块,需要简单焊接和外接扬声器,音量适中。I2S Bonnet: 音质通常优于PWM或模拟输出,驱动相对简单,直接插在树莓派GPIO上。选择时考虑音质、音量、集成便利性和成本。 |
| 驱动电机 (小车) | L298N Motor Driver Module / DRV8833 Dual Motor Driver Carrier / TB6612FNG Dual Motor Driver |
GPIO (PWM for speed, Digital for direction) | 每个电机通常需要2-3个GPIO引脚 (如 IN1, IN2, ENA for L298N)。具体引脚分配根据驱动板和所用库决定。 |
pip install RPi.GPIO gpiozero (gpiozero 提供了更高级的电机控制抽象) |
L298N: 非常常见且廉价,但效率较低,有较大电压降,发热量大,不适合对续航要求高的电池供电项目。DRV8833/TB6612FNG: 基于MOSFET,效率更高,体积更小,发热量小,更适合电池驱动。选择时务必根据所用电机的额定电压和最大电流进行匹配。TB6612FNG通常是小型机器人项目的优选。 |
| 小车底盘与电机 | 2WD/4WD Acrylic or Metal Chassis Kit (通常配备TT直流减速电机或N20金属齿轮减速电机) |
N/A (机械组装) | 电机线连接到电机驱动模块。 | N/A | 选择底盘时需考虑尺寸是否能容纳所有电子元件和电池,以及轮子类型是否适合预期的行驶地面。带编码器的电机 (如霍尔编码器或光电编码器) 对于实现精确的速度控制和里程计算非常有帮助,是实现可靠导航和跟随功能的重要基础。N20电机通常比黄色TT电机更精密,扭矩和噪音表现更好。 |
| [可选]表情显示 | Adafruit Mini 0.54" 8x8 LED Matrix FeatherWing (HT16K33) / 小型I2C OLED显示屏 (如 SSD1306 128x32 或 128x64) / Pimoroni Unicorn HAT Mini (RGB LED Matrix) |
I2C / SPI (Unicorn HAT) | I2C_SDA_SCL / SPI_MOSI_SCLK_CS |
pip install adafruit-circuitpython-ht16k33 luma.led_matrix / pip install adafruit-circuitpython-ssd1306 luma.oled / pip install unicornhatmini |
用于通过点阵、简单图形或短文本来显示小车的“心情”、状态信息或简单的动画效果,增强交互的趣味性。选择时考虑显示内容复杂度、尺寸、功耗和易用性。 |
| [可选]车身灯光 | WS2812B RGB LED Strip (Neopixel) / 单色高亮LED |
GPIO (SPI-like for WS2812B) / GPIO (Digital) | WS2812B通常使用一个GPIO引脚 (如 GPIO18 for PWM/SPI-like signal) / 普通LED使用一个GPIO驱动。 |
pip install rpi_ws281x adafruit-circuitpython-neopixel / RPi.GPIO |
用于状态指示(如充电时呼吸灯、识别到用户时闪烁特定颜色)或营造氛围,增加小车的“表现力”。WS2812B可编程性强,能实现复杂灯效。 |
2.5 自主回充系统
自主回充是提升小车自主性的关键功能,使其能够在电量不足时自动返回充电基座进行充电。这套系统涉及充电坞的设计、导航定位方案的选择以及精确对接技术。

Loona智能机器人在其充电基座上,展示了自动回充的概念
充电坞设计理念
- 机械结构: 设计应便于小车导入和对准。常见的有
V型或U型导向槽,利用小车的外形配合,逐步将小车引导至正确的充电位置。可以考虑一定的坡度设计,方便小车驶入,同时利用重力辅助保持接触。 - 充电触点: 必须保证可靠的电气连接。推荐使用
弹簧顶针 (Pogo Pins),它们具有一定的行程,能适应轻微的高度差和接触面不平整。另一种方式是使用大面积铜片接触,增加接触冗余。设计时需考虑触点的耐用性、防氧化以及防反接保护(如机械结构限位或配合电子保护电路)。 - 导航信标: 根据选用的导航方案,在充电坞的醒目位置安装相应的信标。例如,如果是红外引导,则安装特定编码或频率的红外LED;如果是视觉标签导航,则粘贴清晰的AprilTag或QR码标记。
导航定位方案对比与推荐
选择合适的导航定位方案是实现自主回充的核心技术挑战。以下对比几种常见方案:
| 方案名称 | 传感器/组件 | 原理简述 | 优点 | 缺点 | 适用场景/复杂度 |
|---|---|---|---|---|---|
| 红外信标引导 (IR Beacon) | 充电坞: 高功率红外LED阵列 (特定编码/频率) 小车: 多个带方向性的红外接收管 (如TSOP系列) 或红外摄像头 |
小车通过扫描或比较多个接收管的信号强度差来确定红外信标的方向,逐步调整姿态靠近。编码/频率调制可抗干扰。 | 成本较低,实现相对简单,对环境光有一定抗干扰能力(通过编码/滤波)。 | 有效距离有限(通常几米内),易受物理遮挡,定位精度一般,末端精确对接可能需要其他辅助手段(如机械结构或更近距离传感器)。 | 适用于环境相对简单的室内场景,对远距离导航精度要求不高,或作为末端精确对接的辅助引导。复杂度:低-中。 |
| 视觉标签坞站 (AprilTag/QR Code) | 充电坞: 打印的AprilTag或QR码标记 小车: 摄像头 (可复用主摄像头) |
小车通过摄像头实时检测并识别预设在充电坞上的特定视觉标签,通过算法计算出标签相对于摄像头的三维位姿(位置和方向),然后通过视觉伺服控制小车向目标位姿移动。 | 定位精度较高(尤其在中近距离),可利用现有摄像头硬件,AprilTag等标签可编码ID以区分多个坞站或提供额外信息。 | 计算量较大(尤其在树莓派上进行实时位姿估计),对光照条件变化敏感,标签易被脏污或部分遮挡影响识别,需要良好的摄像头标定。 | 对定位精度有较高要求的场景,且计算资源相对充足(或可由K230协处理)。复杂度:中-高。 |
| 循线引导至充电点 | 充电坞: 充电触点位于特定路径末端 小车: 红外循迹传感器模块 (通常包含多对红外发射/接收管) |
在地面铺设特定颜色的引导线(如深色胶带在浅色地面),小车底部的循迹传感器检测引导线,通过PID等控制算法使小车沿线行驶至充电点。 | 技术成熟,在清晰路径上可靠性高,成本低廉。 | 路径固定,缺乏灵活性,需要预先在环境中铺设引导轨道,可能影响美观或与其他活动冲突。 | 适用于环境固定、可以接受地面引导线的室内场景,如家庭或特定工作区域。复杂度:低。 |
| 超声波/激光雷达 (LiDAR) 辅助 | 充电坞: 特定形状或具有特殊反射特性的坞站结构 小车: 超声波传感器阵列 / 小型2D LiDAR |
通过测距传感器感知坞站的轮廓、距离或特定反射特征,进行导航和对接。LiDAR可以进行SLAM建图和定位。 | LiDAR精度高,可实现更复杂的路径规划和环境适应性。超声波成本低,可用于辅助避障和粗略距离判断。 | 超声波测距精度和角度分辨率有限,易受表面材质影响。LiDAR成本较高,数据处理和算法实现复杂。 | LiDAR适合需要复杂环境导航和自主建图的场景。超声波可作为辅助避障或近距离粗定位手段。复杂度:中(超声波)-极高(LiDAR SLAM)。 |
推荐方案: 组合方案:视觉标签 (AprilTag) 初步定位引导 + 红外信标/机械结构 末端精确对接。
- 理由:
- AprilTag进行中远距离引导: 利用小车已有的主摄像头,在中远距离(例如0.5米至3米范围)识别充电坞上的AprilTag,获取充电坞的大致方向和位置。这为小车提供了一个初始的目标导向,无需额外的专用远距离传感器。AprilTag的识别算法相对成熟,OpenCV配合
pupil-apriltags库可以在树莓派上运行,或由K230加速。 - 红外信标或机械导向进行末端精确对接: 当小车靠近充电坞(例如最后10-30厘米)时,AprilTag可能由于视角变化过大、部分遮挡或景深问题导致识别不稳定或精度下降。此时,可以切换到更简单可靠的近距离引导方式。例如,在充电坞上安装几个特定方向的红外LED,小车前端安装对应的红外接收管,通过检测信号强度或特定编码进行最后阶段的姿态调整和对准。或者,完全依赖精心设计的机械导向槽(如V型槽)将小车“卡入”正确位置。
- 优势互补: 该组合方案结合了视觉标签在中距离定位的灵活性和较高精度,以及红外/机械引导在末端对接的可靠性和低成本,是一种在精度、成本和实现复杂度之间取得较好平衡的策略。
- AprilTag进行中远距离引导: 利用小车已有的主摄像头,在中远距离(例如0.5米至3米范围)识别充电坞上的AprilTag,获取充电坞的大致方向和位置。这为小车提供了一个初始的目标导向,无需额外的专用远距离传感器。AprilTag的识别算法相对成熟,OpenCV配合
充电确认
小车成功对接到充电坞后,需要确认充电是否已开始。这可以通过以下方式实现:
- 电流监测: 使用
INA219等电流传感器监测电池充电电流。当检测到有稳定的充电电流(例如大于某个阈值,如100mA)时,即可确认充电已开始。 - 充电模块状态引脚: 许多专用的锂电池充电管理模块(如TP4056的某些版本,或集成在UPS HAT上的管理芯片)会提供一个充电状态指示引脚(如CHRG, STDBY)。树莓派可以通过读取该GPIO引脚的电平来判断充电状态。
- 电压变化: 监测电池电压,如果电压在接入充电器后持续稳定上升,也可以作为充电开始的一个间接指标,但不如电流监测直接。
确认充电后,小车应进入“充电中”状态,并可以通过语音或灯光向用户反馈。
2.6 K230 机器视觉开发板应用
嘉楠科技的K230芯片是一款专为边缘AI计算设计的SoC,内置了KPU(Knowledge Process Unit)智能计算单元,具备一定的AI算力。在本项目中,K230开发板可以作为树莓派的视觉协处理器,分担计算密集型的视觉任务。
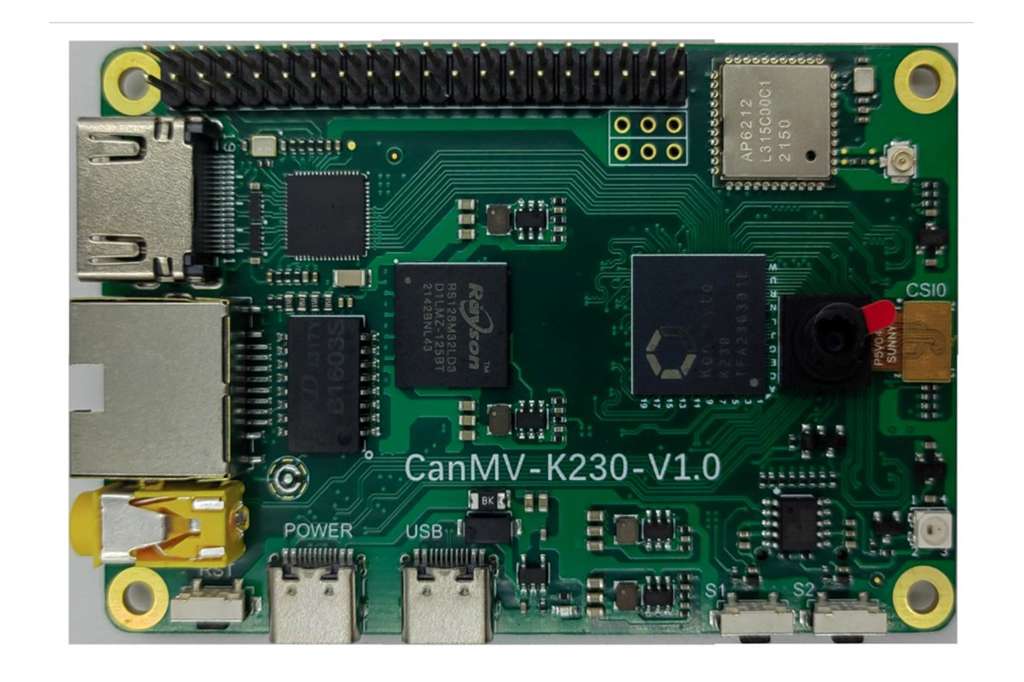
CanMV K230机器视觉开发板,搭载Kendryte K230双核RISC-V处理器
在本项目中的定位与任务
定位: 专用视觉协处理器。
主要任务:
- 实时人脸检测与跟踪: 在较高帧率下(如15-30 FPS)检测视频流中的人脸,并对指定人脸进行跟踪。这是实现主动跟随功能的基础。K230的KPU适合运行轻量级的人脸检测模型(如优化版的YOLO系列、MTCNN或BlazeFace)。
- 特定人脸特征提取与比对(用于身份识别): 如果需要识别特定用户,K230可以运行轻量级的人脸识别模型(如MobileFaceNet、ArcFace的嵌入提取部分),提取人脸特征向量,然后与预先注册的人脸特征库进行比对。这比在树莓派CPU上进行此类运算效率高得多。
- AprilTag/QR码检测与姿态估计: 在自主回充导航过程中,K230可以负责快速检测和解码AprilTag或QR码,并进行初步的姿态估计,将结果发送给树莓派进行路径规划。
- [可选] 简单手势识别或物体分类: 如果有需求,K230也可以运行一些轻量级的手势识别或常见物体分类模型。
目标: 通过将这些计算密集型视觉任务卸载到K230,可以显著提高视觉处理的实时性和响应速度,同时降低树莓派的CPU负载,使其能够更流畅地运行主控制逻辑、与Qwen3 API进行复杂的交互、管理记忆和个性化等上层应用。
与树莓派通信方式
树莓派与K230之间需要稳定高效的通信方式来传输图像数据、控制指令和处理结果。
- 推荐:
以太网 (TCP/IP Sockets)。- 理由: 大多数K230开发板(如 CanMV-K230)具备以太网
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章


















 1万+
1万+

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









