




1.下载源码
git clone https://github.com/ArduPilot/ardupilot # 下载项目源码
cd ardupilot
git submodule update --init --recursive #下载项目依赖的各个子模块代码到本地
2.增加权限
sudo chmod +x Tools/environment_install/install-prereqs-ubuntu.sh
3.在ardupilot目录下执行下面的命令安装环境
Tools/environment_install/install-prereqs-ubuntu.sh -y
source ~/.profile
4.修改环境变量
sudo gedit ~/.bashrc
export PATH=$PATH:$HOME/ardupilot/Tools/autotest #添加环境变量
export PATH=/usr/lib/ccache:$PATH
source ~/.bashrc #让环境变量生效
5.配置固件
./waf configure --board sitl #sitl:面向仿真开发
./waf rover #车船
6.启动Rover仿真环境
cd ~/ardupilot/Rover # 进入Rover目录
sim_vehicle.py --console --map -w # 首次运行需加-w初始化参数;后续可省略-w
7.添加QGC通信端口
#在SITL控制台中输入(不退出当前进程):
output add (自己的windows的ip地址):14550
8.QGC地面站增加端口
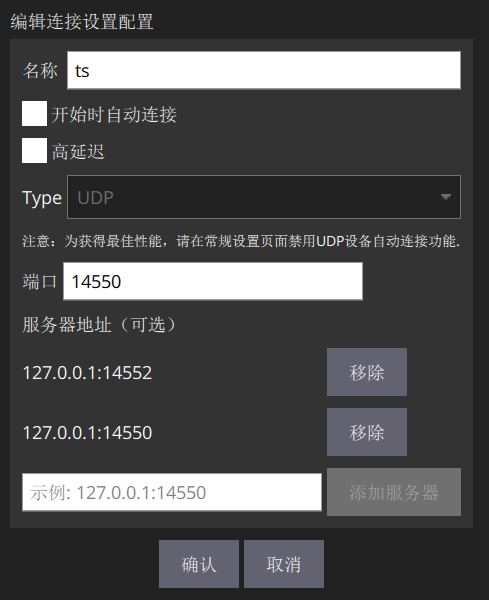
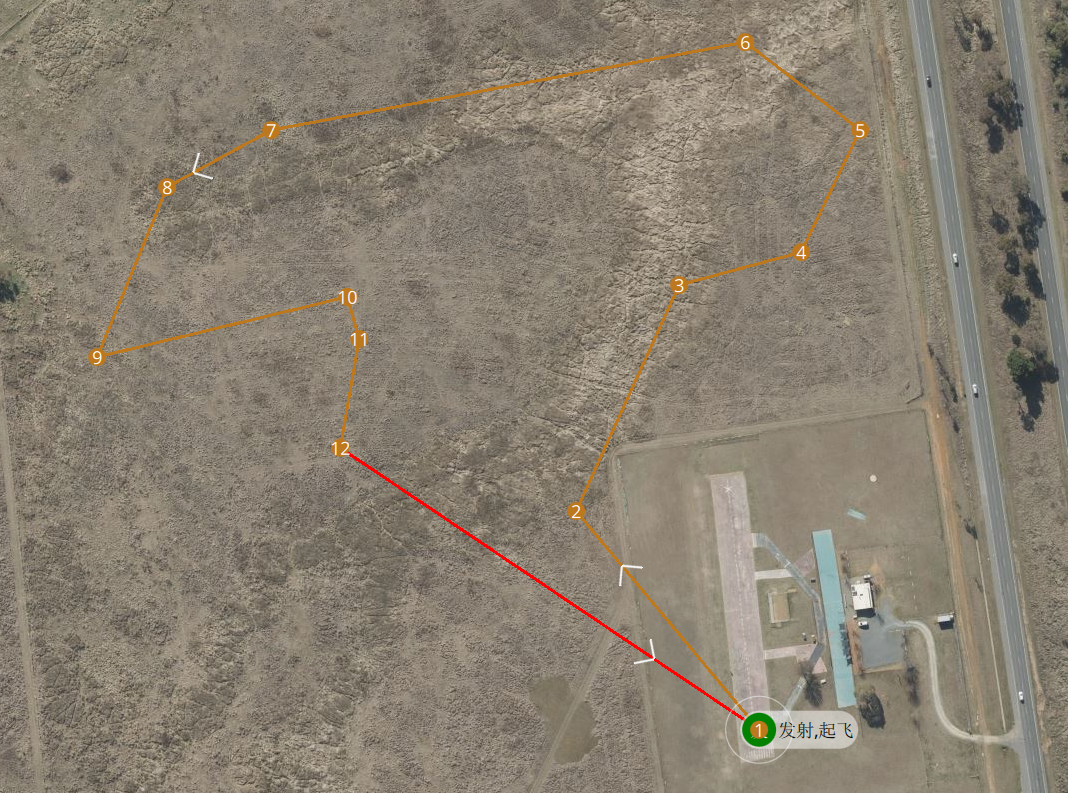
9.在qgc地面站增加任务
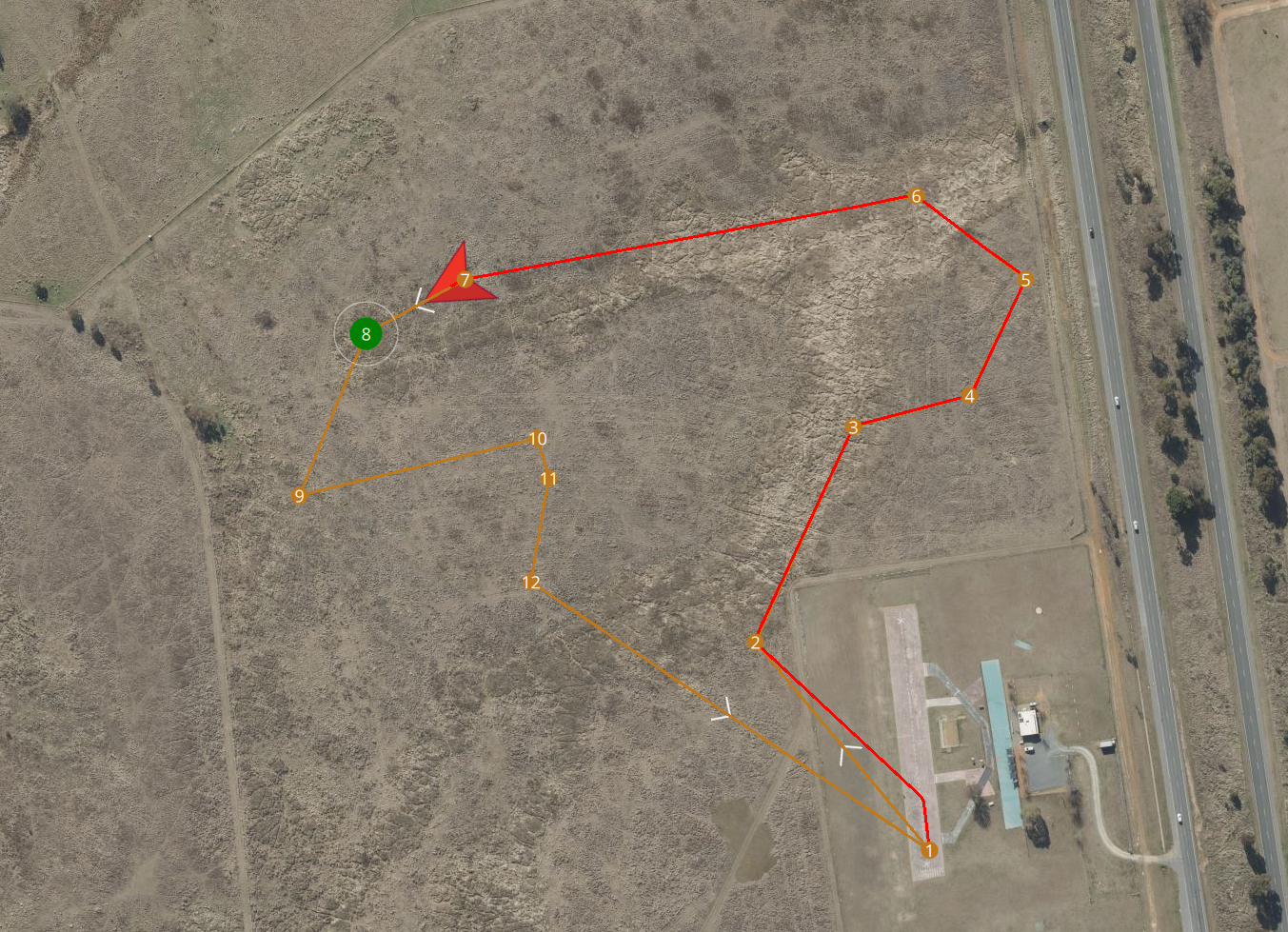
10.启动车辆
# ArduPilot 的无人车模式要求车辆必须处于运动中才能切换到AUTO模式,这是为了防止在静止状态下意外进入自动模式导致突然加速
# 步骤 1:地面站先解锁无人车
# 步骤 2:手动控制车辆起步
mode MANUAL
rc 3 1600 # 油门前进
# 等待 2 秒 # 让车辆达到 >0.5m/s 速度
# 步骤 3:切换自动模式
mode AUTO # 此时不会报错
# 步骤 4:释放控制
rc 3 1500 # 油门回中(AUTO 模式会接管)
11.导航界面



















 5836
5836

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











