



 本文描述了在使用Yocto在IMX8MPAI机器人的robotdesktop源码上遇到的错误,即OESDK和ADT已存在于shell环境中导致冲突。为避免冲突,建议在新终端中清理并重新设置构建目录,通过运行`setup-environment`脚本来解决问题。
本文描述了在使用Yocto在IMX8MPAI机器人的robotdesktop源码上遇到的错误,即OESDK和ADT已存在于shell环境中导致冲突。为避免冲突,建议在新终端中清理并重新设置构建目录,通过运行`setup-environment`脚本来解决问题。
现象:当我在yocto下执行DISTRO=imx-desktop-xwayland MACHINE=imx8mpairobotdesktop source imx-setup-desktop.sh -b build-ai-robot-desktop的时候提示:
错误:检测到 OE SDK/ADT 已存在于此 shell 环境中。在获取此环境脚本时,请使用干净的 shell。
错误 - 尚未设置构建目录。在运行此脚本之前,请运行“setup-environment”脚本以创建 .

原因:
在开发或者运行程序时,可能会使用到各种不同的依赖库和工具。如果在同一个shell环境中同时使用多个项目,不同项目所需的依赖可能会发生冲突,导致程序无法正常运行。使用干净的shell环境可以避免这种冲突,确保每个项目都能够独立地运行。
解决:打开一个新的终端并重新执行这条即可正常执行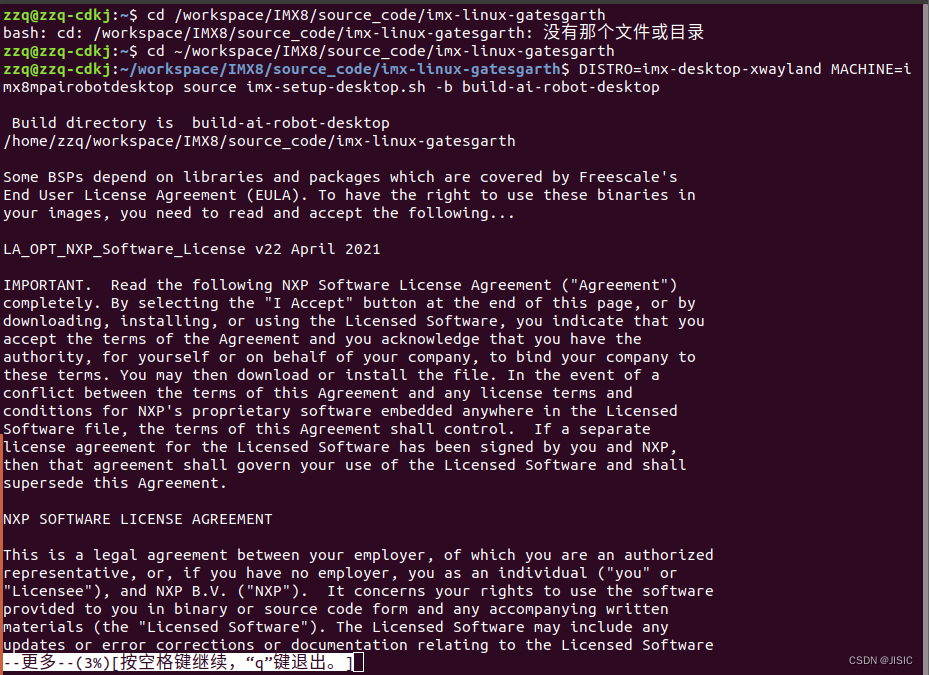


















 2302
2302

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









