




因为图形化考画笔的比较多,我们就挑了一些画笔相关的分享出来

今天我们看一下这个决赛单题的训练:
绘制图形
1. 准备工作:
(1)保留默认小猫角色,隐藏角色;
(2)背景为白色背景。
2. 功能实现:
(1)绘制如下图所示的图案;
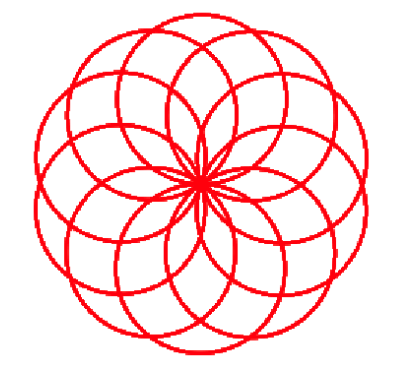
2)画笔为红色,粗细为2,圆形大小自定。
标准答案:
评分标准:
(1) 小猫隐藏 (1分)
(2) 画笔颜色为红色 (1分)
(3)画笔粗细为2 (1分)
(4)能画出一个圆(3分)
(5)能画出10个圆(4分)
参考答案:
因为图形化考画笔的比较多,我们就挑了一些画笔相关的分享出来
今天我们看一下这个决赛单题的训练:
1. 准备工作:
(1)保留默认小猫角色,隐藏角色;
(2)背景为白色背景。
2. 功能实现:
(1)绘制如下图所示的图案;
2)画笔为红色,粗细为2,圆形大小自定。
标准答案:
评分标准:
(1) 小猫隐藏 (1分)
(2) 画笔颜色为红色 (1分)
(3)画笔粗细为2 (1分)
(4)能画出一个圆(3分)
(5)能画出10个圆(4分)
参考答案:

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言




 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章



















 701
701







