



 文章讲述了如何通过将动态规划问题中的状态转移方程简化,并利用下凸壳数据结构,将时间复杂度从O(n)降低到O(logn),解决给定斜率的最小截距问题。实例以洛谷P2365任务安排为例,展示了如何在有限空间内存下处理任务安排问题。
文章讲述了如何通过将动态规划问题中的状态转移方程简化,并利用下凸壳数据结构,将时间复杂度从O(n)降低到O(logn),解决给定斜率的最小截距问题。实例以洛谷P2365任务安排为例,展示了如何在有限空间内存下处理任务安排问题。
题目描述
给定两个长度为 n n n 的数组 t , f t, f t,f 和一个正整数 s s s,设 s u m t [ i ] = ∑ j = 1 i t [ j ] sumt[i]=\sum_{j=1}^{i}t[j] sumt[i]=∑j=1it[j], s u m f [ i ] = ∑ j = 1 i f [ j ] sumf[i]=\sum_{j=1}^{i}f[j] sumf[i]=∑j=1if[j],
d p [ i ] [ j ] = min { d p [ i − 1 ] [ p ] + ( s u m t [ j ] + s × i ) × ( s u m f [ j ] − s u m f [ p ] ) } , 0 ≤ p ≤ j − 1 dp[i][j]=\min\{dp[i - 1][p] + (sumt[j] + s \times i) \times (sumf[j] - sumf[p])\},0\le p\le j-1 dp[i][j]=min{dp[i−1][p]+(sumt[j]+s×i)×(sumf[j]−sumf[p])},0≤p≤j−1。
请优化上述方程,使状态转移时间复杂度从 O ( n ) O(n) O(n) 降低为 O ( log n ) O(\log n) O(logn)。
数据范围
1 ≤ n ≤ 5000 1\le n \le 5000 1≤n≤5000, 0 ≤ s ≤ 50 0 \le s \le 50 0≤s≤50, 1 ≤ t i , f i ≤ 100 1\le t_i,f_i \le 100 1≤ti,fi≤100。
推导过程
d p [ i ] [ j ] = min { d p [ i − 1 ] [ p ] + ( s u m t [ j ] + s × i ) × ( s u m f [ j ] − s u m f [ p ] ) } , 0 ≤ p ≤ j − 1 dp[i][j]=\min\{dp[i - 1][p] + (sumt[j] + s \times i) \times (sumf[j] - sumf[p])\},0\le p\le j-1 dp[i][j]=min{dp[i−1][p]+(sumt[j]+s×i)×(sumf[j]−sumf[p])},0≤p≤j−1
去掉 min \min min,并化简公式,
d p [ i − 1 ] [ p ] = ( s u m t [ j ] + s × i ) × s u m f [ p ] + d p [ i ] [ j ] − ( s u m t [ j ] + s × i ) × s u m f [ j ] dp[i - 1][p] = (sumt[j] + s \times i) \times sumf[p] + dp[i][j] - (sumt[j] + s \times i) \times sumf[j] dp[i−1][p]=(sumt[j]+s×i)×sumf[p]+dp[i][j]−(sumt[j]+s×i)×sumf[j]
设 y ( p ) = d p [ i − 1 ] [ p ] y(p) = dp[i-1][p] y(p)=dp[i−1][p], k ( i , j ) = s u m t [ j ] + s × i k(i,j) = sumt[j] + s \times i k(i,j)=sumt[j]+s×i, x ( p ) = s u m f [ p ] x(p) = sumf[p] x(p)=sumf[p], b ( i , j ) = d p [ i ] [ j ] − ( s u m t [ j ] + s × i ) × s u m f [ j ] b(i,j) = dp[i][j] - (sumt[j] + s \times i) \times sumf[j] b(i,j)=dp[i][j]−(sumt[j]+s×i)×sumf[j],则上式可以写成,
y ( p ) = k ( i , j ) x ( p ) + b ( i , j ) y(p) = k(i,j)x(p) + b(i,j) y(p)=k(i,j)x(p)+b(i,j)
在这条式子里, y ( p ) y(p) y(p), k ( i , j ) k(i,j) k(i,j), x ( p ) x(p) x(p) 都是已知的,只有 b ( i , j ) b(i,j) b(i,j) 是未知的,因为 b ( i , j ) b(i,j) b(i,j) 包含要求的 d p [ i ] [ j ] dp[i][j] dp[i][j]。
我们的目标是使 d p [ i ] [ j ] dp[i][j] dp[i][j] 最小,也就是使截距 b ( i , j ) b(i,j) b(i,j) 最小,如果把 ( x ( p ) , y ( p ) ) (x(p), y(p)) (x(p),y(p)) 看作平面上的点,只需要用一条斜率为 k ( i , j ) k(i,j) k(i,j) 的直线从下往上平移,那么直线第一个触碰到的点 ( x ( q ) , y ( q ) ) (x(q), y(q)) (x(q),y(q)) 就是我们需要的答案,此时 b ( i , j ) = y ( q ) − k ( i , j ) x ( q ) b(i,j)=y(q)-k(i,j)x(q) b(i,j)=y(q)−k(i,j)x(q), d p [ i ] [ j ] = b ( i , j ) + ( s u m t [ j ] + s × i ) × s u m f [ j ] dp[i][j]=b(i,j)+(sumt[j] + s \times i) \times sumf[j] dp[i][j]=b(i,j)+(sumt[j]+s×i)×sumf[j]。
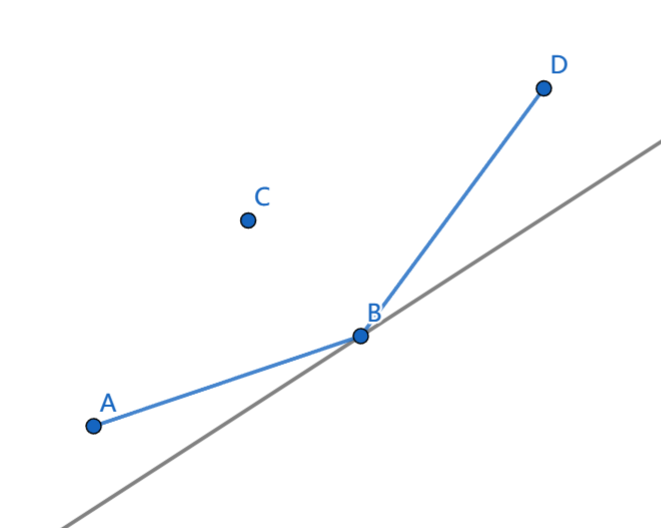
从上图可以发现,只有在下凸壳边缘的点才有可能被选中,点 C C C 在下凸壳内不可能被选中,所以我们需要维护一个下凸壳,支持在最右边插入一个点和查询给定斜率的最小截距。
插入一个点
由于 x ( p ) x(p) x(p) 是单调递增的,所以我们总是在下凸壳的最右边插入一个点。
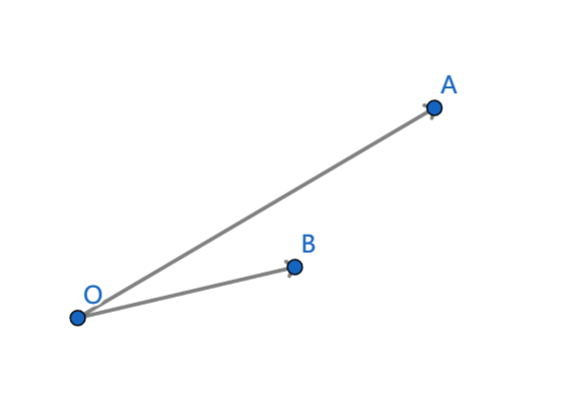
设将要插入的点为 A A A,下凸壳最右边的点为 B B B,下凸壳次右边的点为 O O O。
如果 O A OA OA 在 O B OB OB 的顺时针方向或 O A OA OA 与 O B OB OB 重合,此时点 B B B 在下凸壳内,需要删掉点 B B B,继续和下凸壳新的最右边两个点比较。
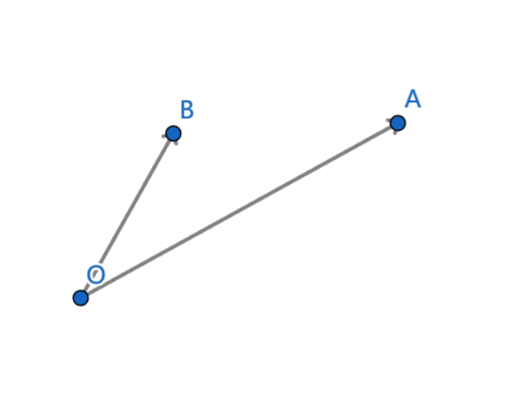
如果 O A OA OA 在 O B OB OB 的逆时针方向,那么直接把点 A A A 插入到下凸壳末尾。
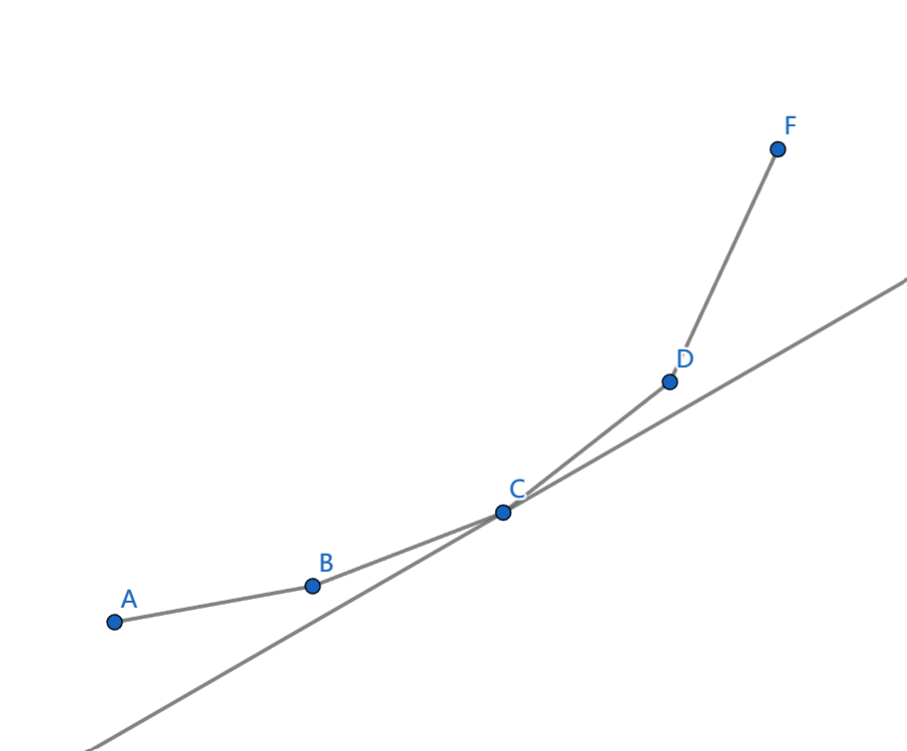
查询给定斜率的最小截距
下凸壳相邻点构成线段的斜率是单调递增的,我们把斜率从左往右存下来,然后使用二分查找,找到第一个比 k ( i , j ) k(i,j) k(i,j) 大的斜率,这个斜率位置上的点就是我们要找的。
总结
斜率优化需要先把DP方程化简成 y ( p ) = k ( i , j ) x ( p ) + b ( i , j ) y(p) = k(i,j)x(p) + b(i,j) y(p)=k(i,j)x(p)+b(i,j) 的形式,然后使用上凸壳或下凸壳维护 ( x ( p ) , y ( p ) ) (x(p),y(p)) (x(p),y(p)),使得能够在 O ( log n ) O(\log n) O(logn) 的时间复杂度内算出 d p [ i ] [ j ] dp[i][j] dp[i][j]。
例题
这题卡内存,需要使用滚动数组。
例题代码
#include <bits/stdc++.h>
using namespace std;
#define int long long
#define uint unsigned int
#define pii pair<int, int>
template <typename T> using vector2 = vector<vector<T>>;
template <typename T> using MaxHeap = priority_queue<T>;
template <typename T> using MinHeap = priority_queue<T, vector<T>, greater<T>>;
#define all(x) (x).begin(), (x).end()
// #define endl '\n'
// #define endl " line in : " << __LINE__ << endl
// 向量点积和叉积
struct Point { int x, y; };
#define Vector Point
Vector operator-(Point a, Point b) {
return { a.x - b.x, a.y - b.y };
}
int cross(Vector a, Vector b) {
return a.x * b.y - b.x * a.y;
}
// 返回值>0,ob在oa的逆时针方向
// 返回值<0,ob在oa的顺时针方向
// 返回值=0,oa与ob重合
// 逆正,顺负,重零
int vcmp(Point o, Point a, Point b) {
return cross(a - o, b - o);
}
struct DownConvexHull {
vector<Point> pt;
vector<double> ks;
void insert(Point p) {
// p.x 应该单调递增
if (pt.size())
assert(p.x > pt.back().x);
while (pt.size() >= 2) {
int n = pt.size();
Point p0 = pt[n - 2], p1 = pt[n - 1], p2 = p;
if (vcmp(p0, p1, p2) <= 0)
pt.pop_back(), ks.pop_back();
else
break;
}
if (pt.size())
ks.push_back(1.0 * (pt.back().y - p.y) / (pt.back().x - p.x));
pt.push_back(p);
}
int query(int k) {
assert(pt.size() >= 1);
if (pt.size() == 1) {
// y = kx + b, b = y - kx;
return pt[0].y - k * pt[0].x;
}
int i = lower_bound(all(ks), k) - ks.begin();
return pt[i].y - k * pt[i].x;
}
void clear() {
pt.clear(), ks.clear();
}
};
const int N = 5005, INF = 1e16, P = 998244353;
int n, s, t[N], f[N], sumt[N], sumf[N], dp[2][N], *f0 = dp[0], *f1 = dp[1];
void test() {
cin >> n >> s;
for (int i = 1; i <= n; i++)
cin >> t[i] >> f[i];
for (int i = 1; i <= n; i++) {
sumt[i] = sumt[i - 1] + t[i];
sumf[i] = sumf[i - 1] + f[i];
}
int ans = INF;
fill(f0, f0 + N, INF);
f0[0] = 0;
DownConvexHull dch;
for (int i = 1; i <= n; i++) {
fill(f1, f1 + N, INF);
dch.clear();
for (int j = i; j <= n; j++) {
// y = dp[i-1][k]
// x = sumf[k]
if (f0[j - 1] != INF)
dch.insert({ sumf[j - 1], f0[j - 1] });
// b = dp[i][j] - (sumt[j] + s * i) * sumf[j]
// dp[i][j] = (sumt[j] + s * i) * sumf[j] + b
// k = (sumt[j] + s * i)
f1[j] = (sumt[j] + s * i) * sumf[j] + dch.query(sumt[j] + s * i);
}
swap(f0, f1);
ans = min(ans, f0[n]);
}
cout << ans << endl;
}
signed main() {
ios::sync_with_stdio(0);
cin.tie(0);
// int T; cin >> T; while (T--)
test();
return 0;
}
最后,送给大家一只可爱的绫华。


















 1720
1720

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









