



windows安装
启动盘制作:
- 下载win10安装媒体,如下图:
- 点击下载之后的exe文件,按照下面的步骤进行操作,制作启动盘

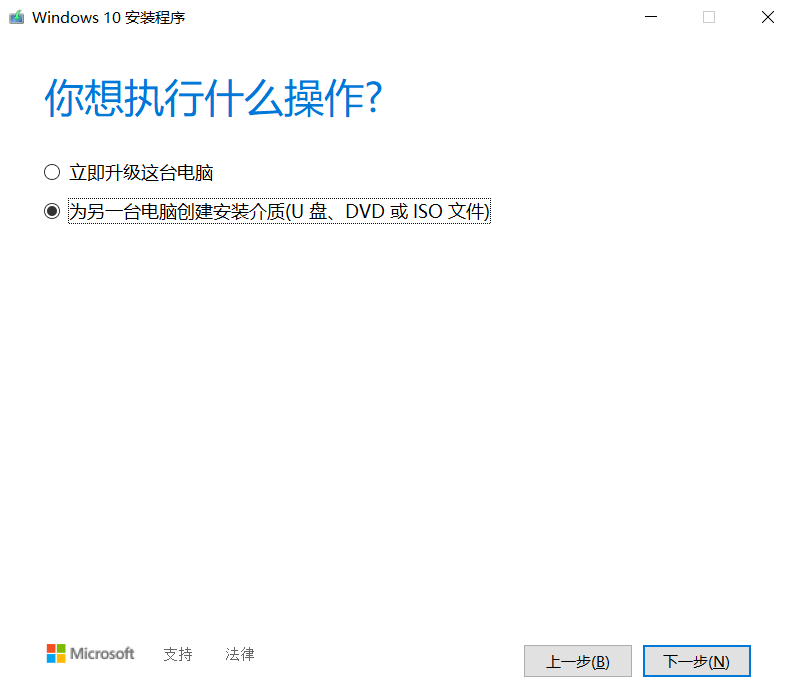
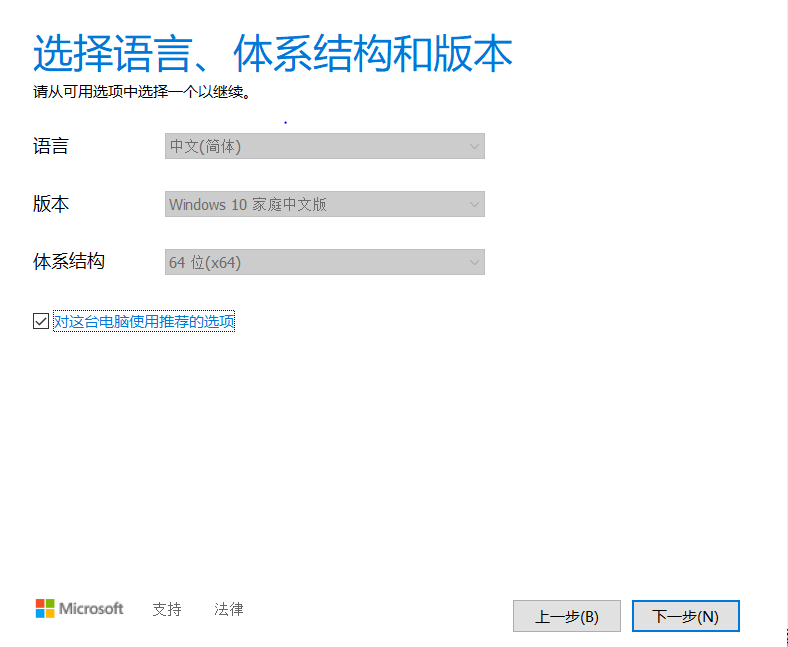
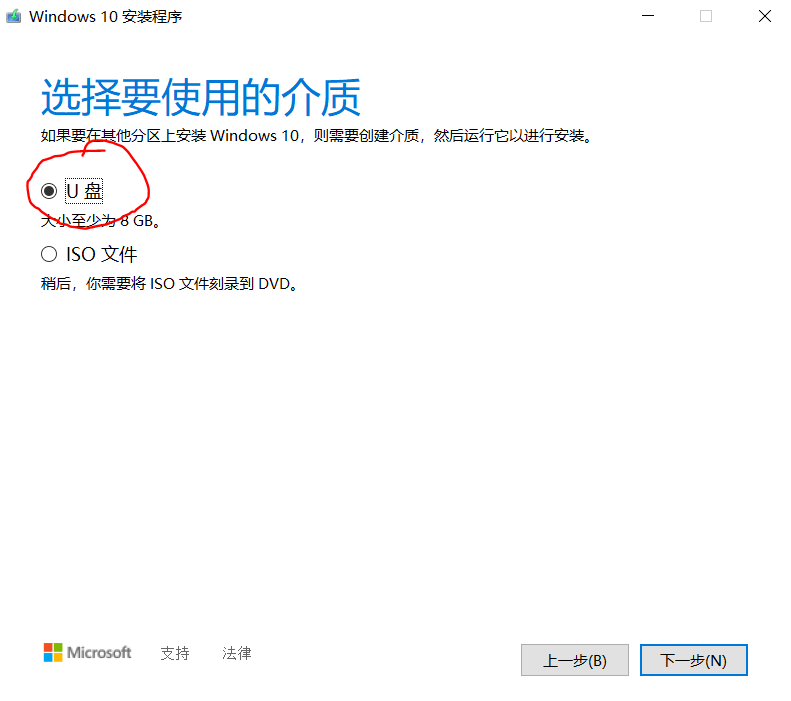
继续下一步(后续步骤省略),选择U盘完成启动盘的制作
win10安装:
插入U盘,重启系统,进入BIOS界面,选择从刚刚制作的启动盘启动,一步步操作完成系统的安装。
ubuntu安装
启动盘制作:
- 下载ubuntu系统
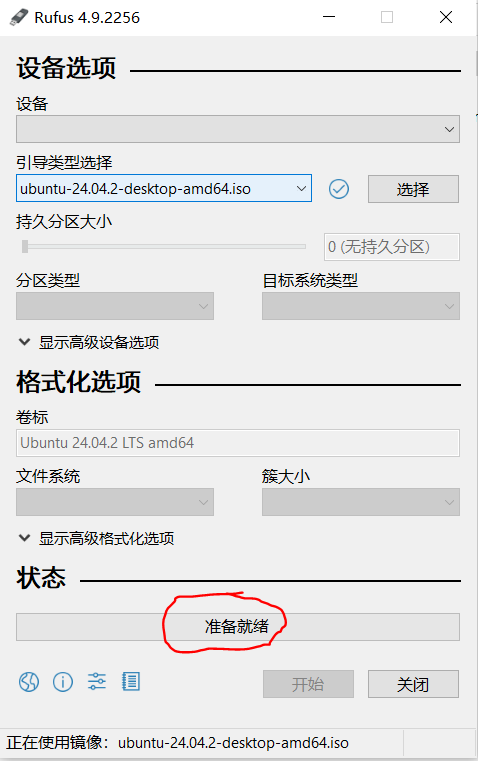
- 下载rufus,选择镜像文件,选择U盘,点击开始,制作完成之后,“准备就绪”会变绿
ubuntu安装:
开机进入BIOS界面,选择从刚刚制作的启动盘启动,接下来选择“Install Ubuntu”,分配各个分区,完成最终的系统安装

















 1823
1823

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









