



据高工机器人产业研究所(GG)在《2025年人形机器人产业发展蓝皮书》中预测,2025年全球人形机器人市场规模63.39亿元;2030年市场规模将超过640亿元;到2035年,将超过4000亿元。
目前国内人形机器人赛道竞争激烈,已形成白热化。不仅有多家创业公司参与其中,互联网科技巨头也纷纷通过投资或自研的方式入场......
在人形机器人从概念走向现实的关键征程中,如何让其像人类一样感知世界、实现人机交互,是核心挑战之一。其中,“力觉”感知——即精确感知与控制交互力与力矩的能力,是实现精细操作、自适应行走与安全碰撞应对的基石。海伯森技术以其在六维力传感器上的双重改革:应变片材质从硅到金属的转变,以及控制器内置的一体化结构设计,为人形机器人赋予了前所未有的“细腻触觉”,实现了产品品质的跨越式提升。
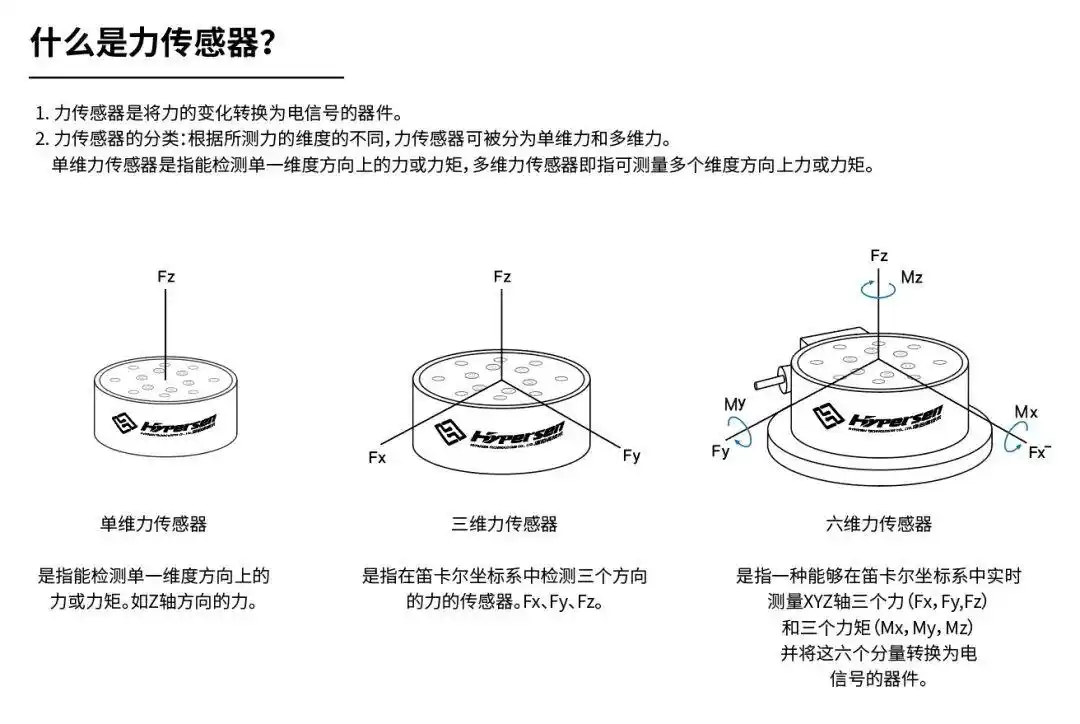
六维力传感器是一种能够同时测量物体在三个空间方向上的力(Fx, Fy, Fz)和绕这三个方向的力矩(Mx, My, Mz)的高精度智能传感设备,其核心工作原理通常依赖于贴有应变片的弹性结构体;当外界施加力和力矩时,这个结构体会产生微小的形变,附着其上的应变片的电阻值就会发生相应变化,通过精密解耦这多个应变片信号组成的复杂电桥电路,并经过复杂的解耦算法,就可以精确地分离并计算出六个独立分量的数值,这种强大的能力使得六维力传感器成为机器人、高端制造和科研领域的关键部件。
一、海伯森材质革新:金属应变片,铸就稳定可靠的“神经末梢”
人形机器人的工作环境复杂多变,从恒温实验室到有温差的真实场景,其“腕踝”等关键关节处的传感器必须能承受持续动态负载并保持稳定输出。海伯森将应变片材料从传统的硅基升级为航空金属,正是为了满足这一严苛需求。
材质变革如何夯实品质基础?
温漂性能的质的飞跃:硅材料对温度变化极其敏感,传统硅基传感器零点温漂通常高达 0.1%/℃以上,导致传感器零点与灵敏度随环境温度大幅漂移,是长期稳定性的大敌。海伯森采用的特种航空金属材料具备优异的热稳定性,其电阻温度系数极低,且热膨胀系数能与传感器金属弹性体形成完美匹配。TF080系列配合内置温度补偿算法,温漂性能较行业平均水平大幅降低。这一突破使得机器人在 - 20℃~80℃的温度范围内,将温漂控制在<0.1%FS/10℃。这从物理层面显著抑制了温漂,使传感器在复杂的工业环境下也能保持输出稳定,降低了系统对复杂温补算法的依赖。这一突破使得机器人无论是执行“精密擒拿”鸡蛋,还是“大力旋紧”瓶盖的任务,都能实现精准稳定的力道控制,展现出卓越的环境适应性。
线性度与重复精度的提升:金属应变片在弹性形变范围内,其电阻变化与机械应变之间呈现出高度线性的关系。其 HPS-FT080 型号非线性度仅为<0.5% FS,接近航空航天级标准,这种固有的优良特性,使得传感器在全量程范围内都具有卓越的线性度,测量结果更真实,重复性更高,简化了标定与数据处理的难度。确保了力觉反馈的高度真实,为机器人流畅完成推、拉、握、捏等复杂动作提供了可靠的数据基础。
方向性与长期可靠性的增强:传统硅基传感器因材料强度不足,在使用过程中容易造成断裂,而海伯森金属应变片强度更高,应力传递更直接。这不仅有效降低了六维力信号之间的串扰,提升了测量方向性,更确保了传感器在承受长期、交变负载时,性能不会因材料疲劳而衰减,使用寿命大幅延长在抗过载能力上,海伯森全系列产品则达到 350% 过载承受能力。这确保了在机器人的整个生命周期内,尽可能使其“脚踝”和“手腕”的力觉感知始终如一,为动态平衡与步态控制提供长期可靠的数据支持。
二、海伯森结构革新:内置控制器,打造高度集成的“神经线”
人形机器人结构紧凑,对空间的利用要求极为苛刻,同时需要极低的系统延迟以实现快速反应。海伯森将控制器内置的一体化设计,完美回应了这些需求。
结构变革如何改善用户体验?
简洁与可靠性:传统的分体式设计需要多根电缆在机器人与控制器之间连接,不仅布线繁琐,更是噪声干扰、故障频发的风险点。针对此类问题,海伯森将控制器内置后,传感器可直接输出经过处理的高质量数字信号,连接线缆大幅减少,系统集成度显著提高,整体可靠性倍增。集成时间从行业平均的 3 小时缩短至 1 小时(效率提升67%),同时后期维护成本降低 50%。
信号保真,抗干扰能力提升:模拟信号在长距离传输中极易受到电磁干扰。内置控制器使得微弱的应变片信号得以在传感器内部最短路径内被放大、模数转换和数字处理,最大限度地避免了噪声引入,保证了从感知到输出的全程信号纯净度。
智能内嵌,随连随用:内置的强大算力使得传感器能够实时完成温度补偿、非线性校正、动态解耦等复杂运算。用户无需再配置额外的处理单元或编写复杂的补偿算法,上电即可获得稳定、精准、已解耦的六维力/力矩数字信号,极大地降低了开发门槛和时间成本。
架构优化,为设备“减负”:一体化的结构为机器人等设备节省了宝贵的安装空间,并且强大的定制化能力可根据特定的结构空间、接口协议和性能要求,进行联合设计开发与参数深度定制,确保产品实现最优匹配与性能融合。

















 2192
2192

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









