






一.入门
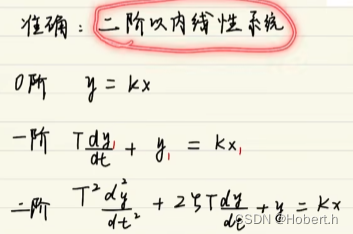
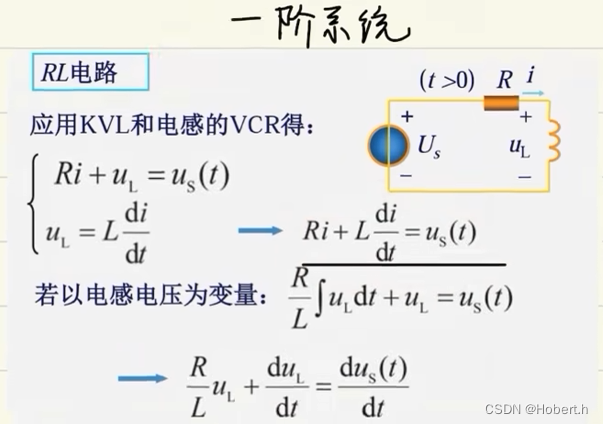
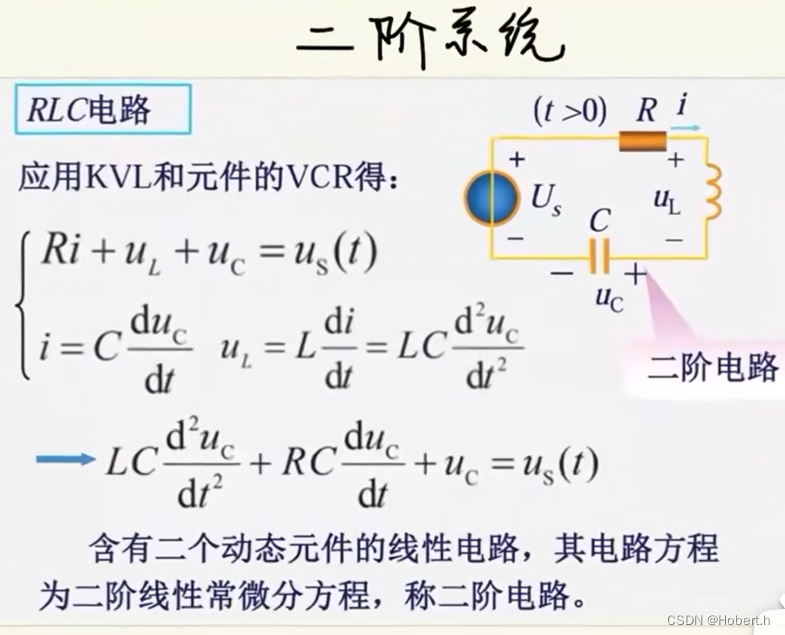
1.适用于二阶以内的线性系统
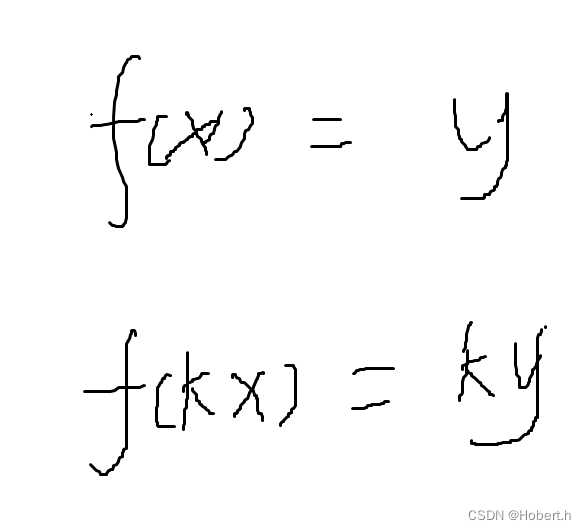
满足齐次性
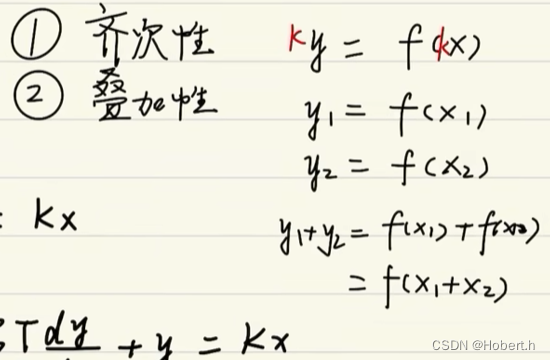
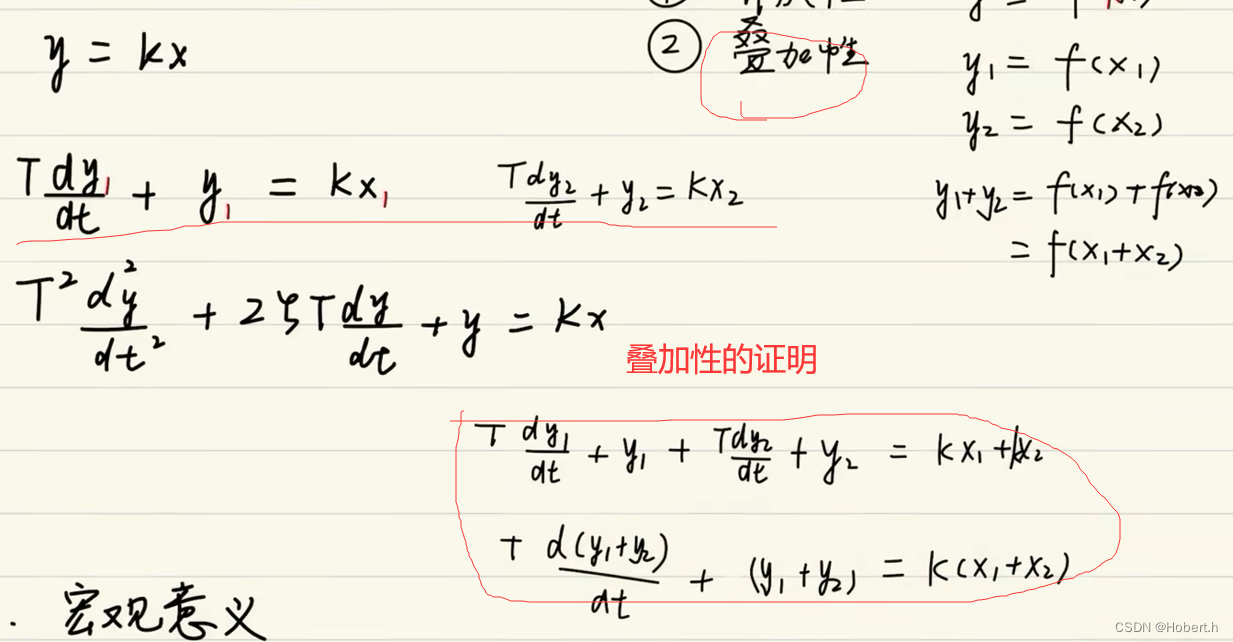
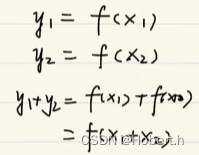
和叠加性
问题:
对于y1和y2的求导可以变成对于(y1+y2的求导)吗?
举例一阶和二阶系统:
1.齐次性
2.叠加性
(1)可以将高阶系统转换为低阶系统
(2)用李亚普诺夫第一方法在非线性系统的平衡点处线性化
以上两种方法就可以实现PID系统对非线性系统和高阶系统进行控制
2.宏观意义
上手简单,不需要进行精确的建模
二.略懂
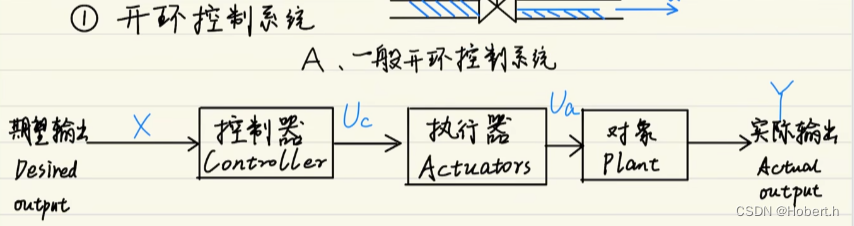
Uc:控制信号
|1|.控制系统
1.开环控制系统
不存在反馈
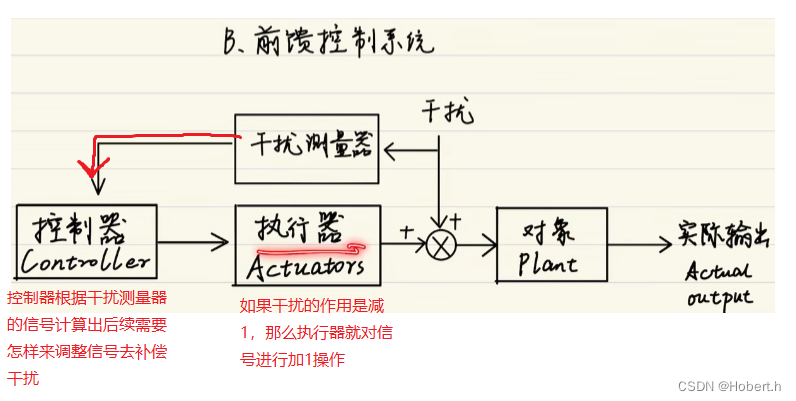
2.前馈控制系统
对干扰进行补偿
3.闭环控制系统
实际的输出会反馈到输入
(1)单闭环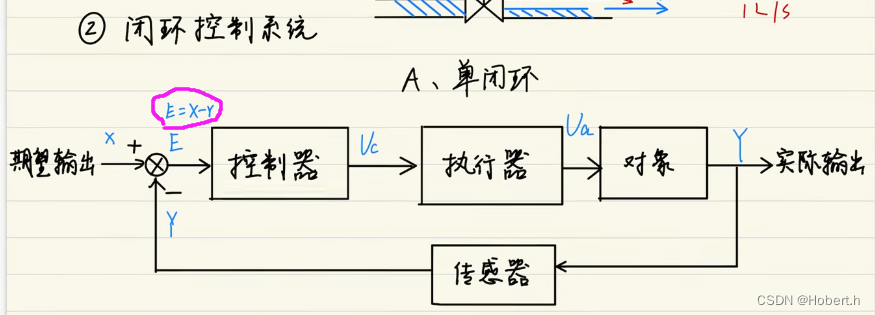
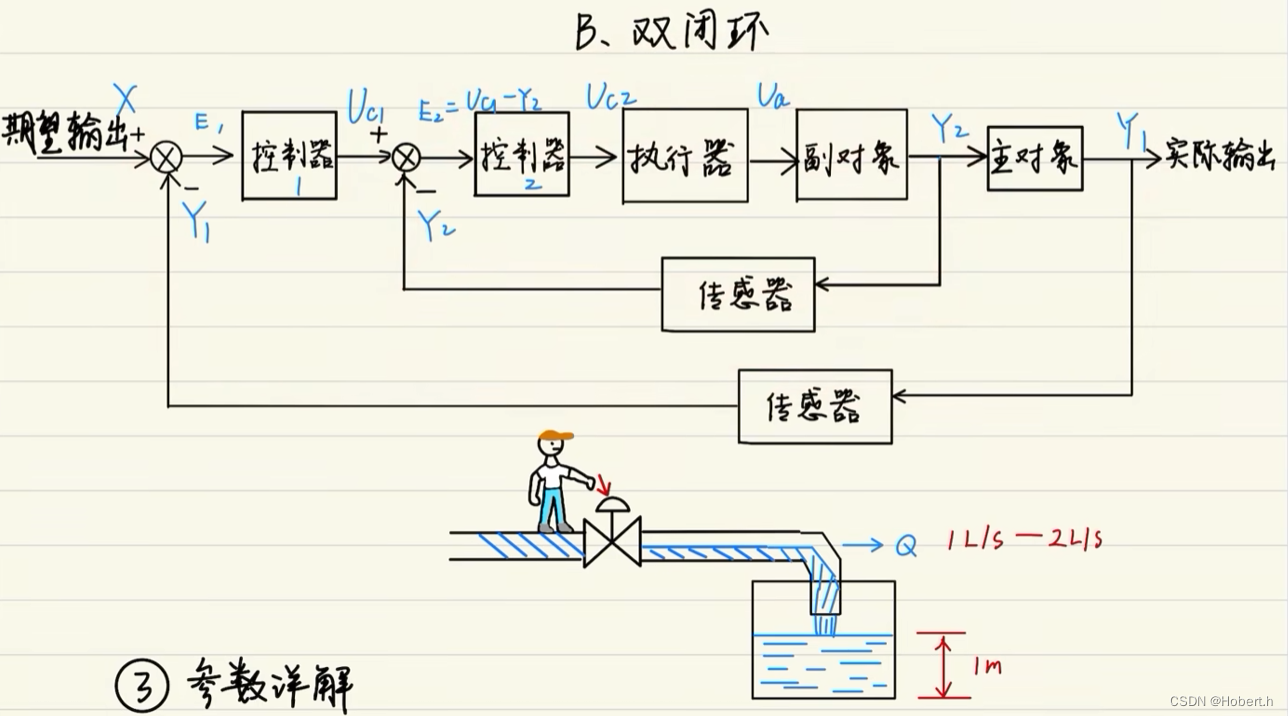
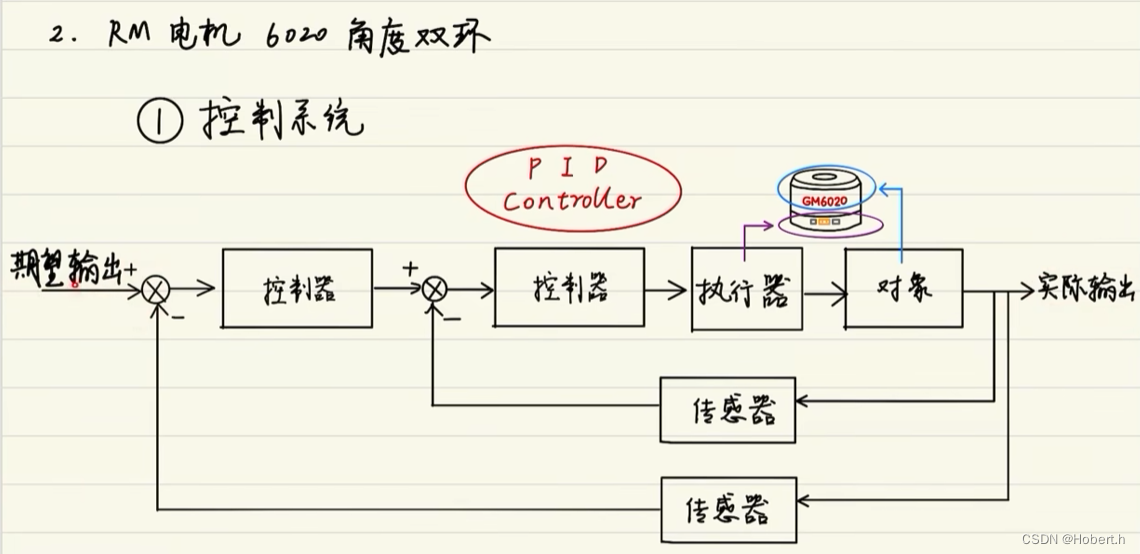
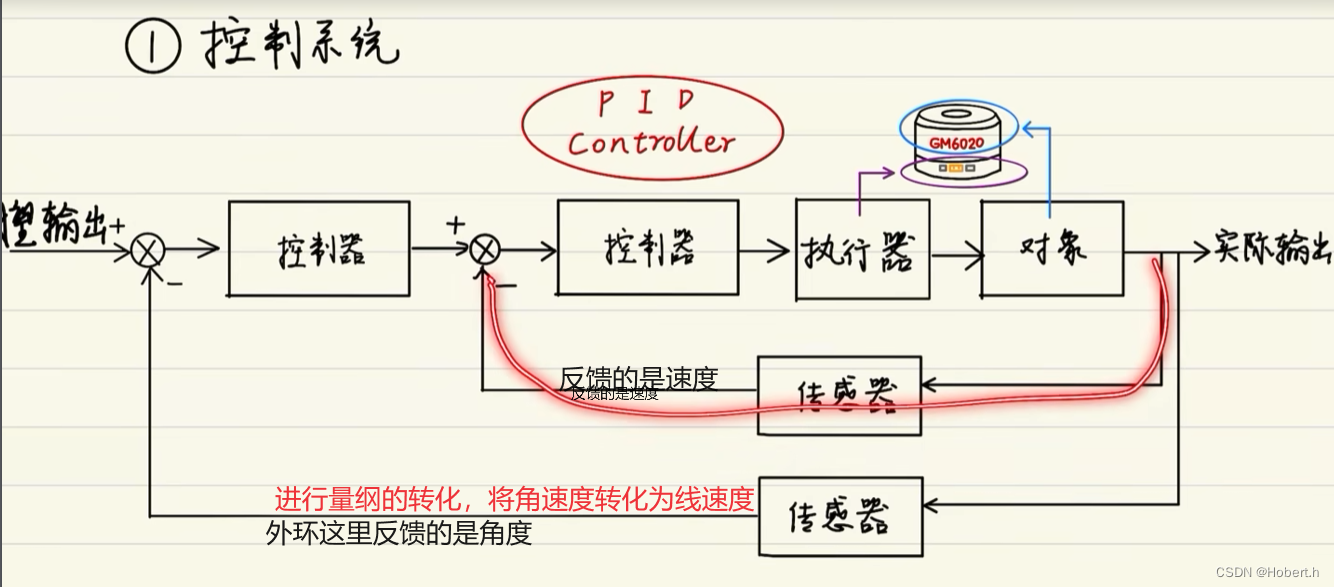
(2)双闭环 (内外环)
(3)前馈反馈复合控制系统
开环+闭环
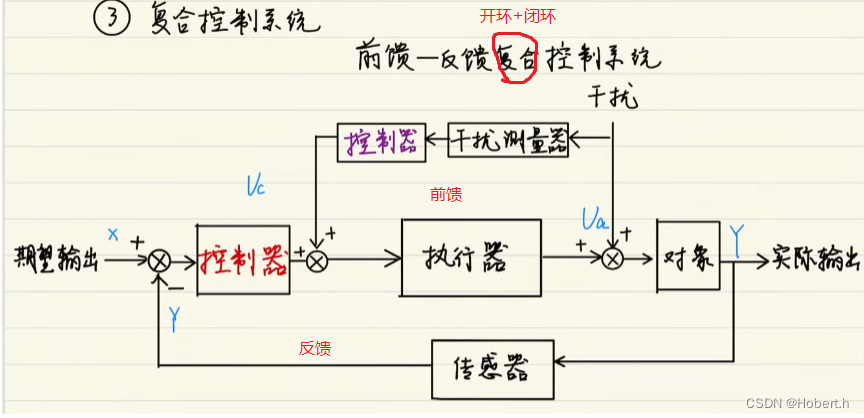
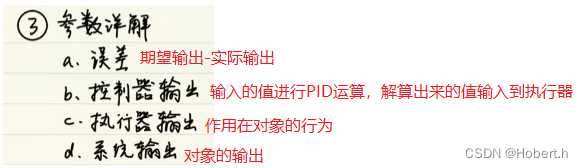
输入-输出=误差值
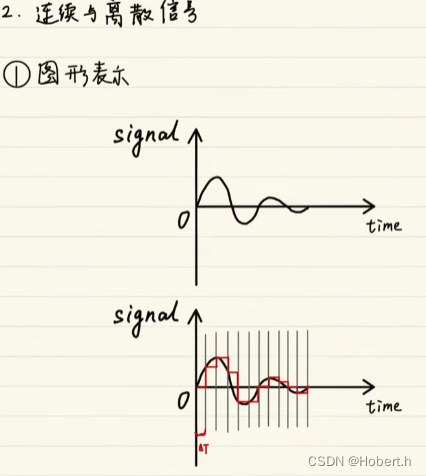
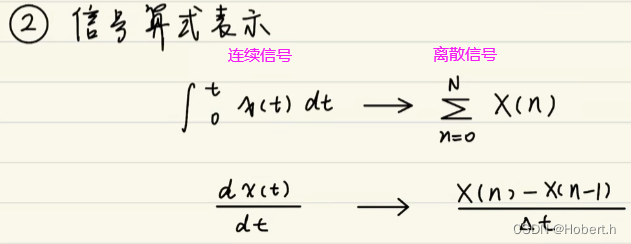
|2|.连续离散信号
三.懂得都懂
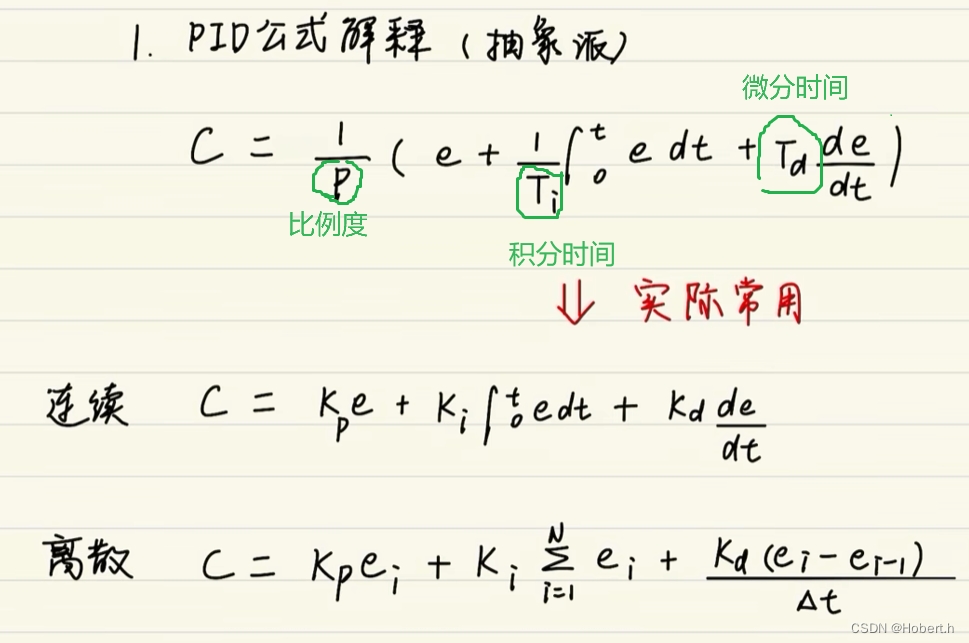
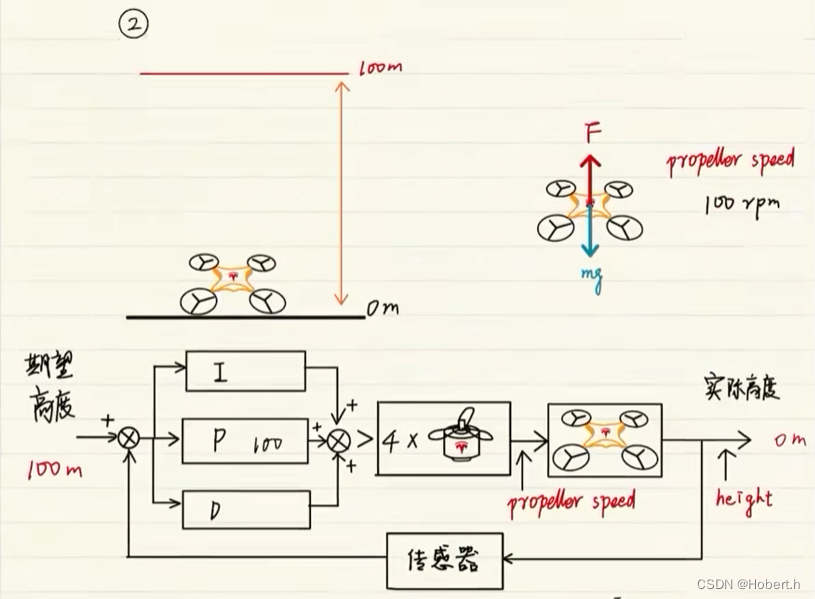
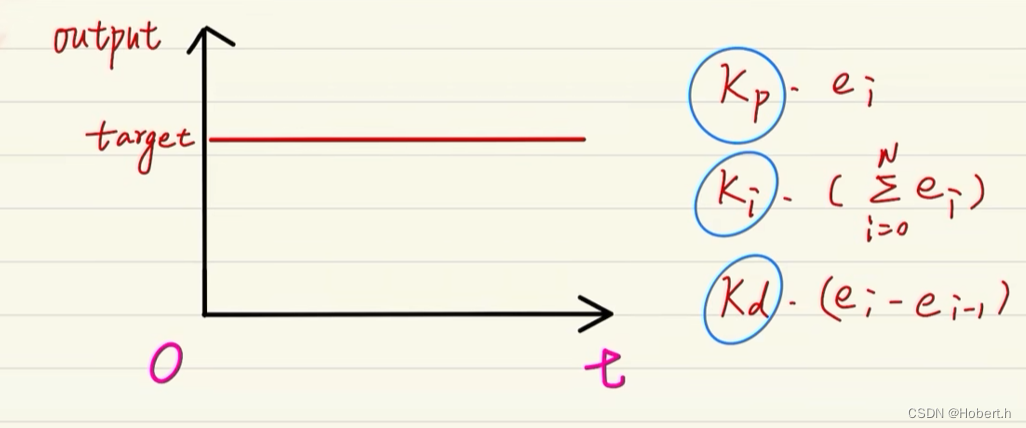
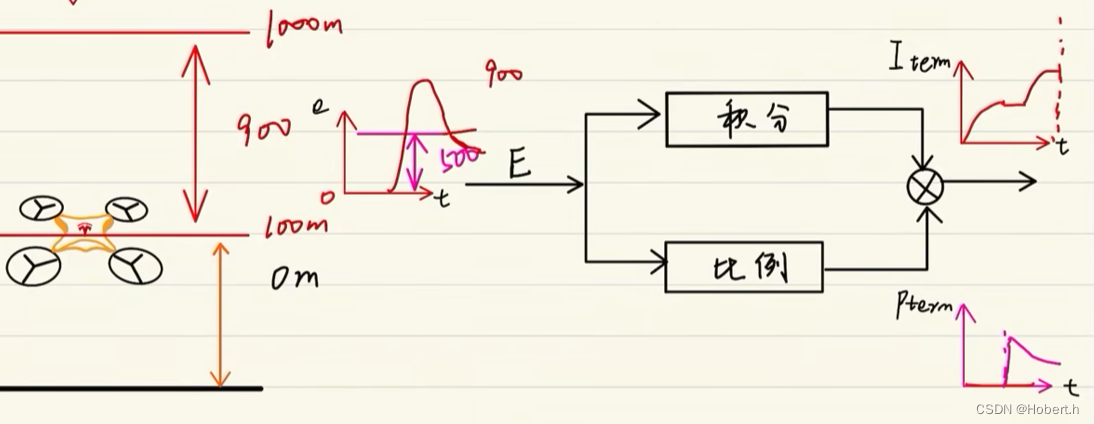
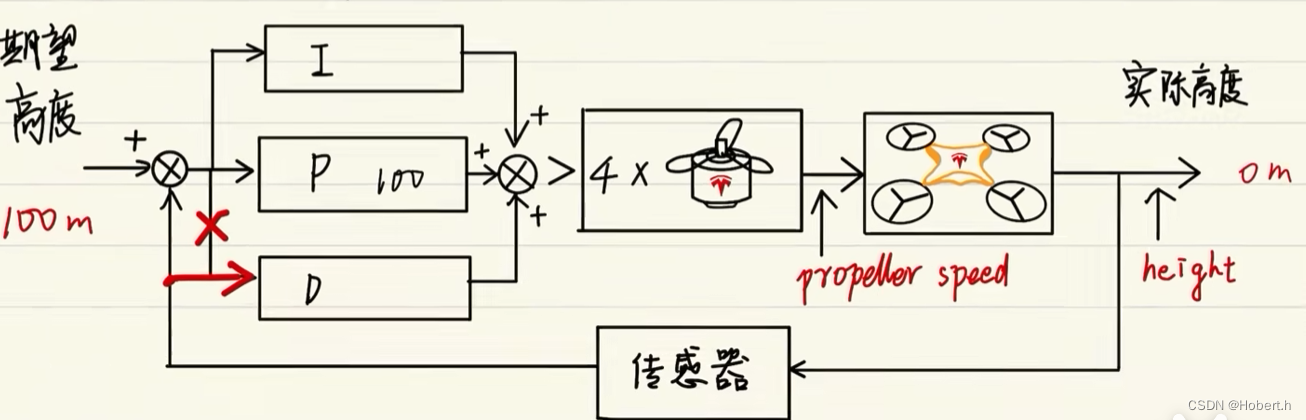
1.PID公式的解释
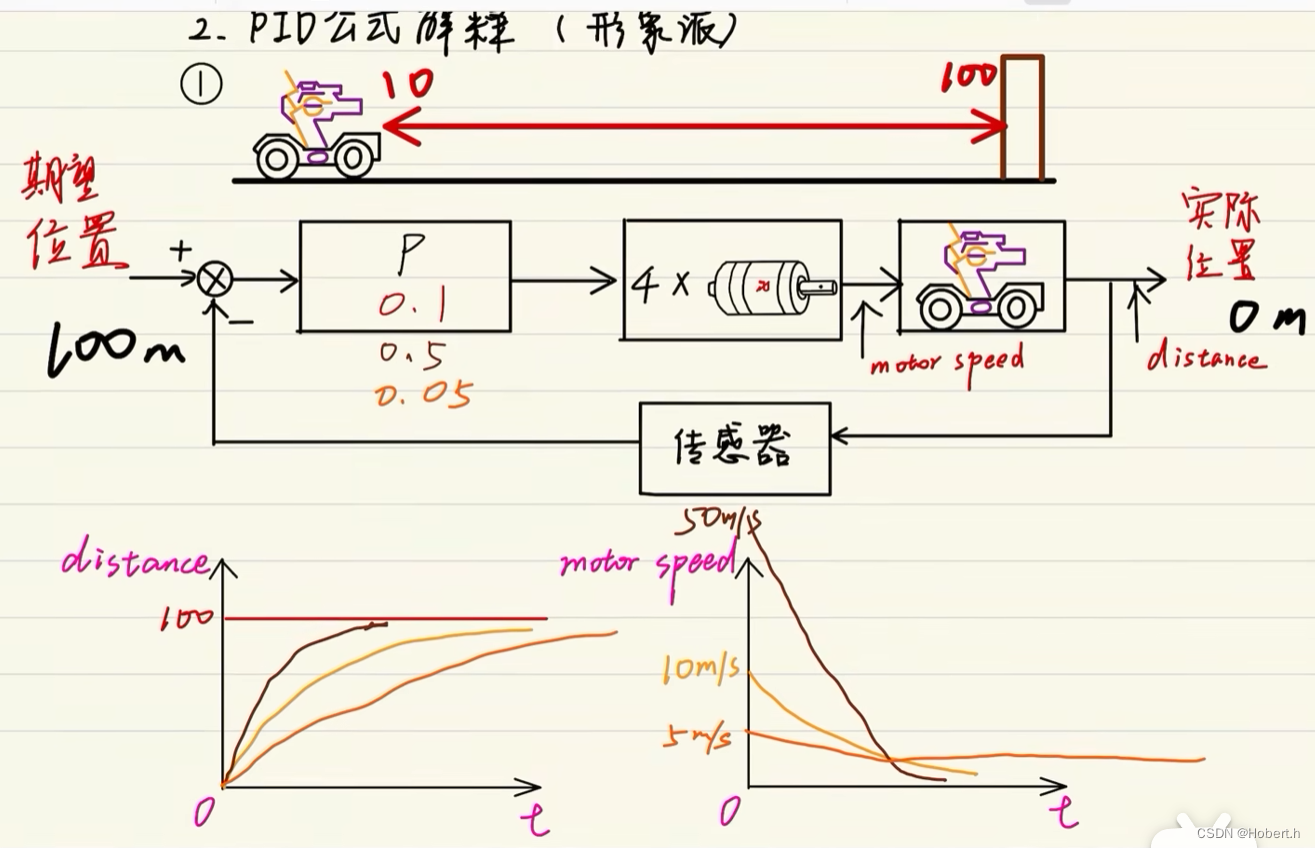
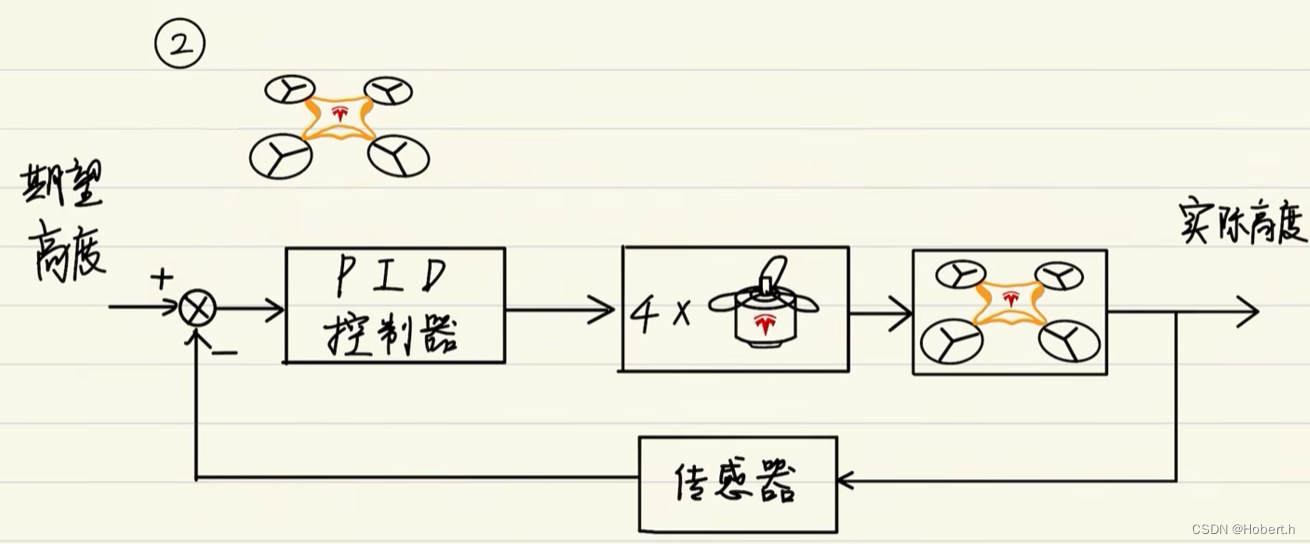
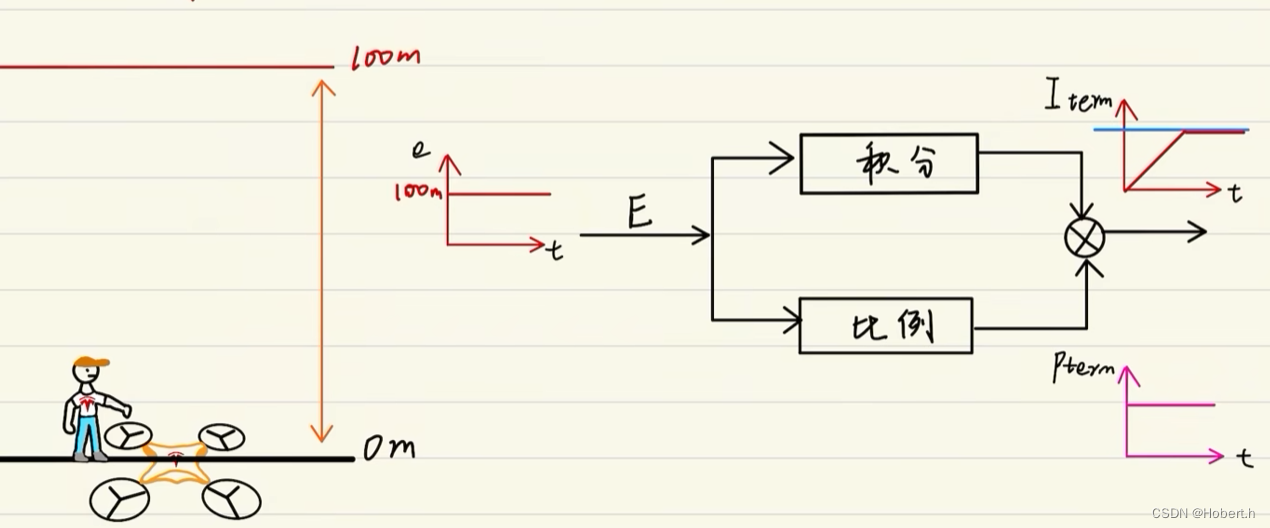
对于无人机控制系统仅仅调节P值是无法达到目标高度的
而最后的偏差在控制系统里叫做稳态误差
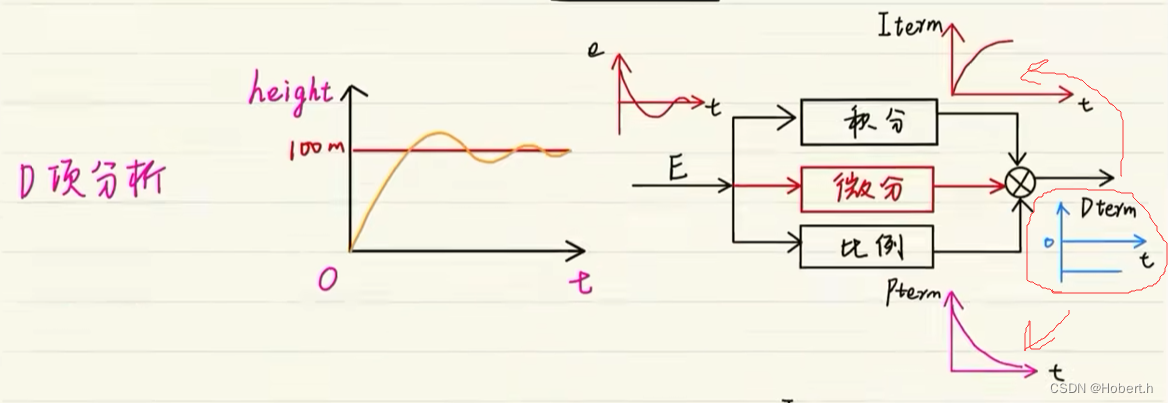
积分是根据以往的误差进行积累的,积分不受当前的状态影响,Ki越大积分作用就越强,消除径差的作用就越强
微分项是对误差进行求导,Kd*de/dt,防止无人机出现超调的现象
3.PID参数的整定
先调节Kp,直到渐渐贴合target值,然后引入Ki消除径差,除非有过大的震荡现象,才会加入Kd
4.其余相关控制知识
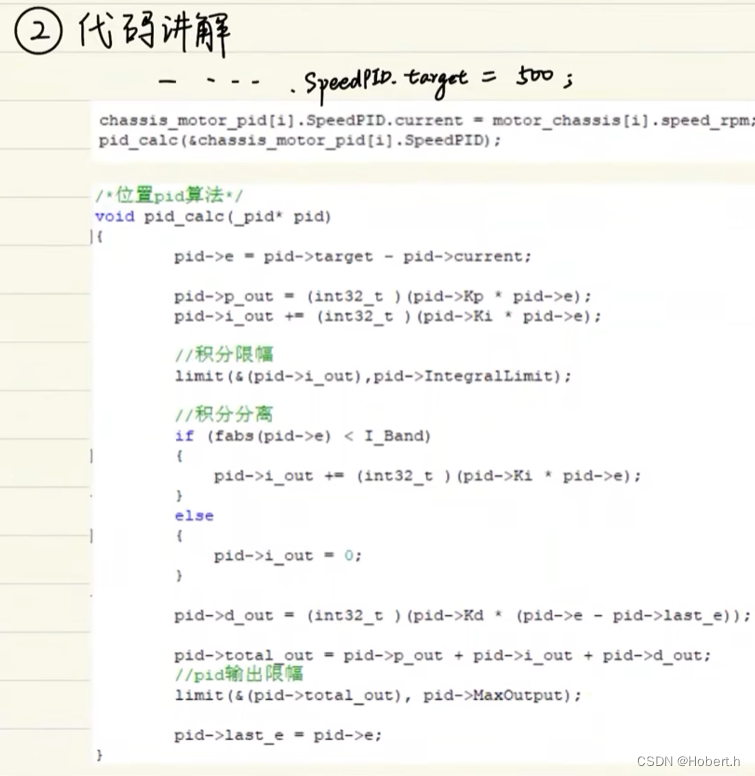
(1)积分限幅
对I值进行限幅,防止机器在被人按住,误差在时间的积累下,I值越来越大,松手后,骤然上升的情况
(2)积分分离
通过误差的阈值判断,对积分值进行一个限制,如设置误差值在500以下开启积分作用,以上关闭,这样就可以避免,当更改目标值后,误差过大时,积分作用明显,再加上P值,就会产生很大的升力,出现超调
(3)微分先行
多分出一条路将误差值传给D,这样误差值就会先影响I,P,这样就可以消除输入突变的影响
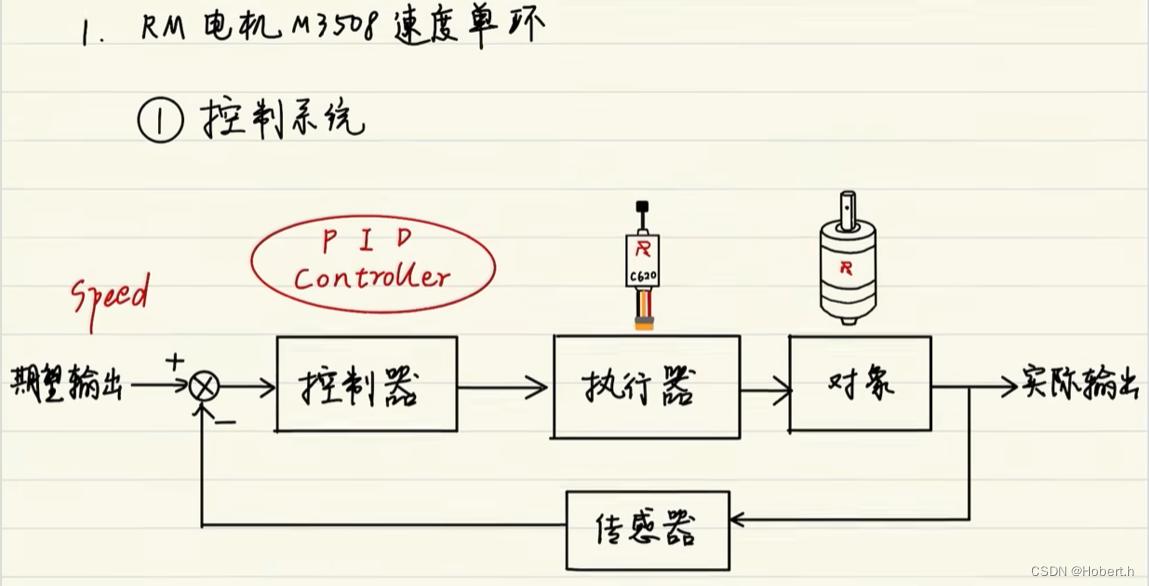
四.会用就行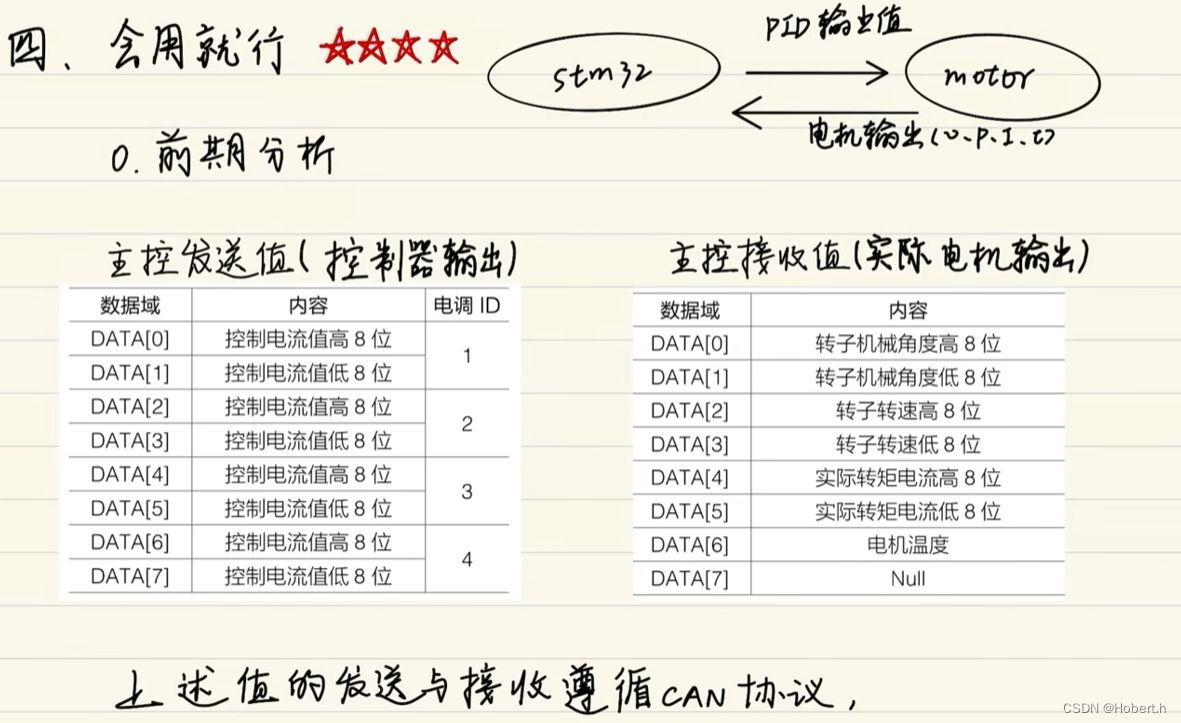
(1)单环
 代码讲解
代码讲解
(2)双环
代码可以去视频笔记里看

















 916
916

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









