




 本文围绕RT-Thread操作系统展开,介绍了其设备驱动框架,包括设备结构体、注册、操作函数等概念。还详细阐述了串口(UART)、SPI、I2C、GPIO驱动的使用、注册方法及应用程序代码示例,为开发者在嵌入式设备驱动开发提供了指导。
本文围绕RT-Thread操作系统展开,介绍了其设备驱动框架,包括设备结构体、注册、操作函数等概念。还详细阐述了串口(UART)、SPI、I2C、GPIO驱动的使用、注册方法及应用程序代码示例,为开发者在嵌入式设备驱动开发提供了指导。
目录
一、概述
1.1 设备驱动框架
RT-Thread 提供了一个灵活且易用的设备驱动框架,用于开发和管理各种硬件设备的驱动。
该框架旨在简化设备驱动的开发流程,提高设备驱动的可复用性和可移植性。
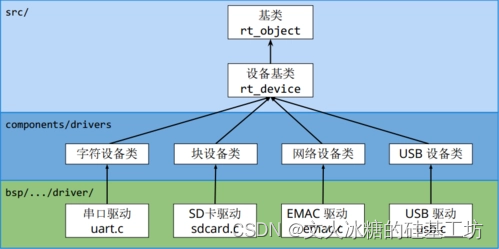
以下是 RT-Thread 设备驱动框架的一些重要概念和组件:
-
设备结构体(struct device):RT-Thread 设备驱动框架使用结构体来表示设备。设备结构体包含了设备的名称、类型、状态等信息,并通过函数指针提供了设备操作的接口函数。
-
设备驱动注册(rt_device_register):设备驱动注册是将设备与设备驱动程序关联起来的过程。通过调用
rt_device_register函数,可以将设备结构体和相应的设备驱动程序进行关联,并将设备注册到 RT-Thread 设备驱动框架中。 -
设备操作函数(read、write、control 等):设备操作函数是设备驱动程序中定义的用于操作设备的函数,如读取设备数据、写入设备数据、设备控制等。设备操作函数是通过设备结构体中的函数指针进行调用的。
-
设备号(dev_num):设备号是用于唯一标识设备的数字或符号,可以通过设备号来唯一地识别和访问设备。
-
设备管理(rt_device_open、rt_device_close):设备管理函数负责设备的打开和关闭操作。通过调用
rt_device_open函数,可以打开设备并准备开始设备操作;通过调用rt_device_close函数,可以关闭设备并释放相关资源。 -
设备文件系统(Device Filesystem):RT-Thread 提供了设备文件系统(设备文件描述符)来统一管理设备的访问。应用程序可以通过打开和关闭设备文件描述符来访问设备。
RT-Thread 设备驱动框架还支持许多其他特性,如设备的中断处理、DMA(直接内存访问)支持、设备电源管理等。开发者可以根据具体的硬件设备的需求,使用 RT-Thread 设备驱动框架来实现相应的设备驱动程序。
关于 RT-Thread 设备驱动框架的更详细的说明和使用方法,您可以参考 RT-Thread 官方文档和相应的示例代码。
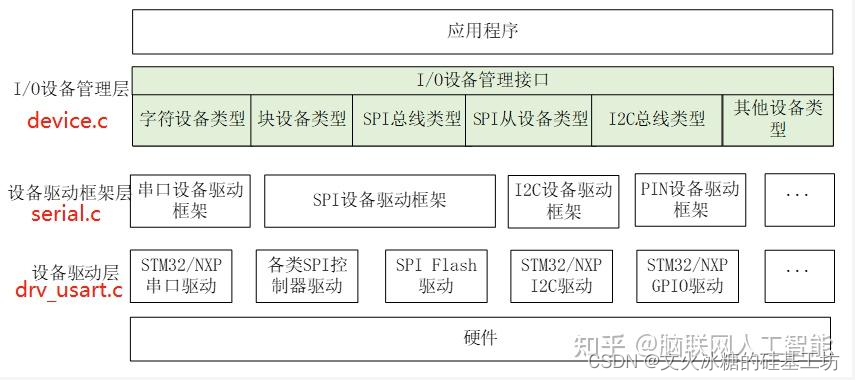
1.2 设备驱动软件架构
二、串口驱动(UART)
2.1 串口驱动的使用
在RT-Thread中,串口驱动(UART驱动)是一种常用的设备驱动,用于实现串口通信功能。
RT-Thread提供了可配置和可拓展的串口驱动框架,使得在不同平台上开发和移植串口驱动变得更加简单和灵活。
下面是使用RT-Thread串口驱动的一般流程:
-
配置串口设备:在RT-Thread的配置文件
rtconfig.h中,需添加或修改相关的配置选项,包括串口设备的数量、引脚配置、中断优先级等。 -
初始化串口驱动:在应用程序初始化时,调用
rt_hw_uart_init()函数来初始化和注册串口设备。该函数需要传入相关参数,如UART端口号、波特率和数据位等。 -
打开和使用串口:使用
rt_device_open函数来打开并获取串口设备的句柄。之后,可以使用rt_device_read和rt_device_write函数来读取和写入数据。还可以设置串口的其他属性,如流控、超时等。
以下是示例代码展示了如何使用RT-Thread的串口驱动:
#include <rtthread.h>
/* 串口设备的名称 */
#define UART_NAME "uart1"
/* 应用程序入口 */
void uart_example_entry(void *parameter)
{
rt_device_t uart;
/* 查找串口设备 */
uart = rt_device_find(UART_NAME);
if (uart == RT_NULL)
{
rt_kprintf("UART device not found!\n");
return;
}
/* 打开串口设备 */
if (rt_device_open(uart, RT_DEVICE_FLAG_RDWR) != RT_EOK)
{
rt_kprintf("Failed to open UART device!\n");
return;
}
/* 读写数据 */
char tx_buffer[] = "Hello, RT-Thread!";
char rx_buffer[32];
rt_device_write(uart, 0, tx_buffer, sizeof(tx_buffer));
rt_device_read(uart, 0, rx_buffer, sizeof(rx_buffer));
/* 关闭串口设备 */
rt_device_close(uart);
}
/* 主函数 */
int main(void)
{
/* 创建一个线程来执行串口示例程序 */
rt_thread_t tid = rt_thread_create("uart", uart_example_entry, RT_NULL, 1024, 25, 10);
if (tid != RT_NULL)
{
rt_thread_startup(tid);
}
return 0;
}
请注意,上述代码仅展示了使用RT-Thread串口驱动的基本流程,具体的配置和使用方法可能因平台和芯片的不同而有所差异。在实际使用时,您需要根据硬件平台和使用的串口设备进行适当的配置和修改。
2.2 如何注册一个串口驱动
在RT-Thread中,注册一个串口驱动需要执行以下步骤:
-
配置串口信息:在RT-Thread的配置文件(
rtconfig.h)中,添加或修改配置选项以匹配您的串口设备。包括串口设备的数量、引脚配置和中断优先级等。 -
编写串口驱动代码:在源代码中实现串口驱动,这涉及到底层硬件的操作。需要编写对应平台和硬件的串口驱动代码,包括初始化、中断处理和数据读写等操作。
-
注册串口设备:使用
rt_device_register函数注册串口设备到RT-Thread的设备管理框架中。在注册过程中,需要提供一个结构体struct rt_serial_device,该结构体用于描述串口设备的属性。
下面是一个示例代码展示如何注册一个串口驱动到RT-Thread中:
#include <rtdevice.h>
/* 串口设备的名称 */
#define UART_NAME "uart1"
/* 串口设备结构体 */
static struct rt_serial_device serial;
/* 串口初始化函数 */
static rt_err_t uart_init(struct rt_serial_device *serial)
{
/* 具体的串口初始化代码 */
return RT_EOK;
}
/* 串口配置函数 */
static rt_err_t uart_configure(struct rt_serial_device *serial, struct serial_configure *cfg)
{
/* 具体的串口配置代码 */
return RT_EOK;
}
/* 串口接收函数 */
static rt_size_t uart_rx_indicate(struct rt_serial_device *serial, rt_size_t size)
{
/* 具体的串口接收代码 */
return size;
}
/* 串口发送函数 */
static rt_err_t uart_tx_complete(struct rt_serial_device *serial, void *buffer)
{
/* 具体的串口发送代码 */
return RT_EOK;
}
/* 注册串口设备函数 */
void uart_device_register(void)
{
/* 配置串口设备 */
serial.ops = &uart_ops;
serial.config = rt_malloc(sizeof(struct serial_configure));
serial.ops->init = uart_init;
serial.ops->configure = uart_configure;
serial.config->baud_rate = BAUD_RATE_115200;
/* ... 设置其他串口属性 ... */
/* 注册串口设备 */
rt_device_register((rt_device_t)&serial, UART_NAME, RT_DEVICE_FLAG_RDWR);
/* 打开串口设备 */
rt_device_open((rt_device_t)&serial, RT_DEVICE_FLAG_RDWR);
}
在上述示例代码中,uart_device_register函数负责注册一个串口设备到RT-Thread中。需要创建一个struct rt_serial_device结构体,用于描述串口设备的属性和操作函数。通过初始化结构体的成员变量,并设置操作函数,完成对串口驱动的注册。
最后,通过调用rt_device_register函数注册串口设备到RT-Thread的设备管理框架中,并通过rt_device_open打开串口设备以供应用程序使用。
请注意,上述代码仅展示了注册一个串口驱动的基本流程,具体的实现和配置可能因平台和硬件的不同而有所差异。在实际使用时,您需要根据您的硬件平台和串口设备,编写相应的初始化、配置和操作函数。
三、SPI 驱动
3.1 SPI设备概述
RT-Thread是一个实时操作系统,为嵌入式设备提供了丰富的设备驱动支持,其中包括对SPI(Serial Peripheral Interface)设备的支持。
SPI是一种串行通信协议,用于在嵌入式系统中连接外部设备,如传感器、存储器、显示屏等。它使用四根线(主从模式)或三根线(主模式),通过主设备和从设备之间的全双工通信来传输数据。
在RT-Thread中,对SPI设备的支持主要包括以下几个方面:
-
SPI总线驱动:RT-Thread提供了SPI总线的驱动,用于初始化和控制硬件上的SPI控制器。这部分的代码根据具体的硬件平台和芯片进行编写,它通常包括对SPI控制器的初始化、配置和控制等操作。
-
SPI设备驱动:SPI设备驱动用于实现对具体SPI设备的操作功能,如数据传输、设置通信模式和参数等。它通过SPI总线驱动来与硬件上的SPI控制器通信,然后访问和控制具体的SPI设备。SPI设备驱动通常以设备节点的形式存在于RT-Thread的设备管理框架中。
-
SPI设备节点注册:在使用SPI设备之前,需要将SPI设备驱动注册到RT-Thread的设备管理框架中。通常使用
rt_device_register函数将SPI设备驱动注册为一个设备节点,并指定设备的名称和访问模式。 -
SPI设备访问:通过打开设备节点并使用标准的读写接口来访问SPI设备。可以使用
rt_device_open函数打开设备节点,并通过rt_device_read和rt_device_write等函数进行数据的读写操作。
需要注意的是,对于不同的硬件平台和芯片,SPI的具体配置和操作方法可能会有所不同。因此,您需要根据自己使用的硬件平台和SPI设备的规格书,编写相应的SPI总线驱动和SPI设备驱动。
3.2 使用SPI设备
在 RT-Thread 中使用 SPI 设备,通常需要进行以下步骤:
-
配置硬件和引脚:首先,要确保硬件平台上的 SPI 控制器和引脚已经正确配置。这包括指定 SPI 接口的引脚、时钟配置和其他相关的硬件设置。具体的配置方式可能因硬件平台而异,请参考相关的硬件文档或例程。
-
确认 SPI 设备驱动支持:在使用 SPI 设备之前,需要确保 RT-Thread 的 SPI 设备驱动已编译进内核或作为独立的模块加载。可以在配置 RT-Thread 内核时启用 SPI 设备驱动相关的选项。
-
注册 SPI 设备节点:使用
rt_device_register函数将 SPI 设备驱动注册为设备节点。例如,可以通过以下代码将一个名为 “spi0” 的 SPI 设备驱动注册为设备节点:
rt_spi_bus_attach_device("spi0", "spi0", (void *)SPI_CS_PIN, RT_NULL);
其中,“spi0” 是设备节点的名称,“spi0” 是 SPI 模块的名称(根据具体平台而定),SPI_CS_PIN 是片选引脚的编号(具体根据硬件平台定义)。可以根据需要注册多个 SPI 设备节点。
- 打开和使用 SPI 设备:可以使用
rt_device_open函数打开以前注册的 SPI 设备节点。例如,以下代码通过打开名为 “spi0” 的设备节点来打开 SPI 设备:
rt_device_t spi_dev = rt_device_find("spi0");
rt_device_open(spi_dev, RT_DEVICE_FLAG_RDWR);
将 spi_dev 作为参数传递到 SPI 设备的读写函数中,通过 rt_device_read 和 rt_device_write 等函数与 SPI 设备进行数据的读写操作。
3.3 注册SPI设备
在 RT-Thread 中注册 SPI 设备涉及以下步骤:
-
配置硬件和操作系统:根据你的具体硬件平台,在 RT-Thread 的菜单配置中启用 SPI 总线的支持,并将 SPI 引脚连接到正确的引脚上。
你需要在 bsp 目录下的board.c文件中初始化 SPI 总线,包括设置时钟、引脚复用等。确保硬件平台能正确识别和使用 SPI 总线。 -
编写 SPI 设备驱动:创建一个新的驱动文件,命名为
spi_device.c,其中spi_device为你的 SPI 设备名称。
在驱动文件中,你需要实现初始化和配置 SPI 设备的相关函数,包括打开、关闭、读取、写入、设置通信模式、设置时钟速率等操作。 -
注册 SPI 设备:在
spi_device.c文件中,使用rt_spi_bus_attach_device()函数将 SPI 设备注册到系统中。
该函数的参数包括 SPI 总线名称、SPI 设备名称、SPI 设备 CS 引脚、设备片选信号的电平极性等信息。 -
编译和链接:确保将驱动文件添加到 RT-Thread 工程的
pkg目录中,然后进行编译和链接。你可以使用menuconfig或Env工具进行配置和编译。 -
测试 SPI 设备:在应用程序中使用注册的 SPI 设备进行读取和写入操作,以验证设备是否正常工作。
你可以在应用程序中使用rt_device_open()函数打开 SPI 设备,然后使用read()和write()等函数进行数据的读取和写入。
请注意,以上步骤仅提供了一个基本的概述,在实际开发中可能会因硬件平台和具体的需求而有所不同。在使用 RT-Thread 注册 SPI 设备之前,请确保详细阅读 RT-Thread 相关文档,并根据你的项目需求进行适当的调整和配置。
3.4 RT-Thread 应用程序使用SPI设备代码示例
以下是一个使用 RT-Thread 应用程序访问 SPI 设备的代码示例:
#include <rtthread.h>
#include <rtdevice.h>
#define SPI_DEV_NAME "spi0" // SPI 设备节点名称
#define SPI_CS_PIN 0 // 片选引脚
#define BUFFER_SIZE 10 // 数据缓冲区大小
static rt_device_t spi_dev; // SPI 设备节点
int spi_device_example(void)
{
rt_err_t result;
rt_uint8_t tx_buffer[BUFFER_SIZE] = {0x01, 0x02, 0x03, 0x04, 0x05, 0x06, 0x07, 0x08, 0x09, 0x0A};
rt_uint8_t rx_buffer[BUFFER_SIZE] = {0};
// 查找并打开 SPI 设备节点
spi_dev = rt_device_find(SPI_DEV_NAME);
if (spi_dev == RT_NULL)
{
rt_kprintf("SPI device not found!\n");
return -1;
}
// 打开 SPI 设备节点
result = rt_device_open(spi_dev, RT_DEVICE_FLAG_RDWR);
if (result != RT_EOK)
{
rt_kprintf("Failed to open SPI device: %d\n", result);
return -1;
}
// 配置 SPI 设备参数
result = rt_device_control(spi_dev, RT_DEVICE_CTRL_SPI_CONFIG, (void *)RT_SPI_MODE_0);
if (result != RT_EOK)
{
rt_kprintf("Failed to configure SPI device: %d\n", result);
return -1;
}
// 片选使能
result = rt_device_control(spi_dev, RT_DEVICE_CTRL_SPI_SEL, (void *)SPI_CS_PIN);
if (result != RT_EOK)
{
rt_kprintf("Failed to enable SPI selection: %d\n", result);
return -1;
}
// 发送数据并接收应答数据
result = rt_device_write(spi_dev, 0, tx_buffer, BUFFER_SIZE);
if (result != BUFFER_SIZE)
{
rt_kprintf("Failed to send data: %d\n", result);
return -1;
}
result = rt_device_read(spi_dev, 0, rx_buffer, BUFFER_SIZE);
if (result != BUFFER_SIZE)
{
rt_kprintf("Failed to receive data: %d\n", result);
return -1;
}
// 片选禁用
result = rt_device_control(spi_dev, RT_DEVICE_CTRL_SPI_UNSEL, (void *)SPI_CS_PIN);
if (result != RT_EOK)
{
rt_kprintf("Failed to disable SPI selection: %d\n", result);
return -1;
}
// 输出接收到的数据
rt_kprintf("Received data: ");
for (int i = 0; i < BUFFER_SIZE; i++)
{
rt_kprintf("0x%02X ", rx_buffer[i]);
}
rt_kprintf("\n");
// 关闭 SPI 设备节点
rt_device_close(spi_dev);
return 0;
}
MSH_CMD_EXPORT(spi_device_example, SPI device example);
这个示例程序中,首先通过 rt_device_find 函数查找 SPI 设备节点,然后使用 rt_device_open 函数打开设备节点。接下来,通过 rt_device_control 函数配置 SPI 设备参数,如通信模式,然后使用 rt_device_control 函数使能片选。最后,使用 rt_device_write 函数发送数据,并使用 rt_device_read 函数接收应答数据。最后,通过 rt_device_control 函数禁用片选,并输出接收到的数据。
请注意,示例中的 SPI 设备节点名称和片选引脚(SPI_DEV_NAME 和 SPI_CS_PIN)需要根据具体的硬件平台和 SPI 设备进行配置。
将此示例代码添加到 RT-Thread 的应用程序中,并根据硬件平台进行适当的配置和修改,即可使用 SPI 设备进行数据通信。
四、I2C 驱动
4.1 I2C设备概述
I2C(Inter-Integrated Circuit)是一种串行通信协议,用于在微控制器、传感器、存储器芯片等设备之间进行短距离的数据传输。它由飞利浦(Philips)公司开发,现在已成为广泛使用的通信标准。
I2C 设备是采用 I2C 协议进行通信的外设或集成电路。它们可以包括各种传感器(如温度、湿度、加速度等)、存储器芯片、显示屏、扩展模块等。
以下是一些关键特点和优点:
-
简单性:I2C 设备使用两根信号线(时钟线 SCL 和数据线 SDA)进行通信,相对于其他串行协议来说,它的硬件连接和配置相对简单。
-
多设备支持:I2C 具备多主多从的能力,可以连接多个设备在同一总线上进行通信。每个设备都由唯一的地址进行识别。
-
速度灵活性:I2C 提供不同的通信速率,通常有标准模式(100 Kbps)、快速模式(400 Kbps)和高速模式(3.4 Mbps)可供选择。
-
双向通信:I2C 支持双向的数据传输,可以在同一通信线上进行读取和写入操作。
-
快速应答机制:I2C 使用应答(ACK/NACK)机制,允许从设备快速响应主设备的请求。
在使用 I2C 设备时,通常需要实现以下步骤:
-
硬件连接:连接 I2C 设备的 SCL 和 SDA 引脚到主控制器(如微控制器或单片机)的相应引脚。
-
I2C 总线配置:对于主控制器,需要配置 I2C 总线的时钟速率、主/从模式、地址等参数。
-
I2C 设备驱动:实现 I2C 设备的驱动程序,包括初始化设备、读取和写入数据等操作。这通常涉及到在操作系统或微控制器的软件中使用相应的库或驱动代码。
-
注册 I2C 设备:在操作系统或平台的设备管理中,将 I2C 设备注册到系统中,便于应用程序进行访问。
总之,I2C 设备是使用 I2C 协议进行通信的外设或集成电路,通过简单的硬件连接和驱动程序的开发,可以轻松地与主控制器通信并实现各种功能。
在 RT-Thread 中,使用 I2C 设备涉及以下概述:
-
配置硬件和操作系统:在 RT-Thread 的菜单配置中启用 I2C 总线的支持,并将 I2C 设备的引脚连接到正确的引脚上。
你需要在 bsp 目录下的board.c文件中初始化 I2C 总线,包括设置时钟、引脚复用等。确保硬件平台能正确识别和使用 I2C 总线。 -
编写 I2C 设备驱动:创建一个新的驱动文件,命名为
i2c_device.c,其中i2c_device为你的 I2C 设备名称。
在驱动文件中,你需要实现初始化和配置 I2C 设备的相关函数,包括打开、关闭、读取、写入等操作。 -
注册 I2C 设备:在
i2c_device.c文件中,使用rt_hw_i2c_device_attach()函数将 I2C 设备注册到系统中。
该函数的参数包括 I2C 设备编号、设备地址、时钟速率等信息。 -
编译和链接:将驱动文件添加到 RT-Thread 工程的
pkg目录中,然后进行编译和链接。你可以使用menuconfig或Env工具进行配置和编译。 -
测试 I2C 设备:在应用程序中使用注册的 I2C 设备进行读取和写入操作,以验证设备是否正常工作。
你可以在应用程序中使用rt_device_open()函数打开 I2C 设备,然后使用read()和write()等函数进行数据的读取和写入。
请注意,以上步骤仅提供了一个基本的概述,在实际开发中可能会因硬件平台和具体的需求而有所不同。在使用 RT-Thread 注册 I2C 设备之前,请确保详细阅读 RT-Thread 相关文档,并根据你的项目需求进行适当的调整和配置
4.2 使用I2C 设备
在 RT-Thread 中使用 I2C 设备,你需要按照以下步骤进行配置和编程:
-
配置硬件和操作系统:在 RT-Thread 的菜单配置中启用 I2C 总线的支持,并将 I2C 设备的引脚连接到正确的引脚上。
-
创建 I2C 总线设备:在 RT-Thread 中,I2C 总线是通过 I2C 总线设备来表示的。你需要在设备管理中注册 I2C 总线设备,通过配置正确的引脚和相关参数来初始化 I2C 总线。
-
注册 I2C 设备:在驱动文件中,使用
rt_i2c_bit_add_bus()函数将 I2C 设备注册到系统中。
该函数的参数包括 I2C 设备的名称、总线设备名称、设备地址、时钟速率等信息。rt_i2c_bit_add_bus("i2c1", &i2c1_bus); -
打开和操作 I2C 设备:在应用程序中,你可以使用
rt_device_open()函数打开 I2C 设备。rt_device_t i2c_dev = rt_device_find("i2c1"); rt_device_open(i2c_dev, RT_DEVICE_FLAG_RDWR);然后,你可以使用
rt_device_read()和rt_device_write()函数进行数据的读取和写入操作。uint8_t read_buf[10]; uint8_t write_buf[] = {0x01, 0x02, 0x03}; rt_device_read(i2c_dev, 0x50, 0, read_buf, sizeof(read_buf)); rt_device_write(i2c_dev, 0x50, 0, write_buf, sizeof(write_buf));请注意,这里的地址参数是设备地址,可以根据你的具体设备进行设置。
-
关闭 I2C 设备:在程序结束时,记得关闭打开的 I2C 设备。
rt_device_close(i2c_dev);
以上是一个基本的概述,你可以根据具体的硬件和需求对上述步骤进行调整和扩展。确保阅读 RT-Thread 相关文档,并根据你的项目需要适当地配置和编程
4.3 注册I2C 设备
在 RT-Thread 中,注册 I2C 设备需要进行以下步骤:
-
创建 I2C 设备结构体:首先,你需要创建一个结构体来描述你的 I2C 设备。这个结构体包含设备的名称、设备地址、时钟速率等信息。
static struct rt_i2c_bus_device i2c_bus; i2c_bus.parent.user_data = (void *)I2C_DEVICE_ADDR; i2c_bus.parent.ops = &i2c_ops;这里的
i2c_ops是一个指向你实现的 I2C 操作函数的指针。 -
初始化 I2C 总线:接下来,你需要初始化 I2C 总线,配置引脚和时钟等信息。
rt_i2c_bit_add_bus(&i2c_bus, I2C_BUS_NAME);这里的
I2C_BUS_NAME是你给总线起的名称,在注册设备时会用到。 -
注册 I2C 设备:最后,你需要注册你的 I2C 设备到 RT-Thread 的设备管理器中。
rt_device_register(&i2c_bus.parent, I2C_DEV_NAME, RT_DEVICE_FLAG_RDWR);这里的
I2C_DEV_NAME是你给设备起的名称,应该与设备在系统中的名称一致。
完成上述步骤后,你的 I2C 设备就成功注册到了 RT-Thread 中。可以使用 rt_device_find() 函数找到设备,并使用 rt_device_open()、rt_device_read()、rt_device_write() 等函数操作你的设备。
4.4 应用程序使用I2C设备
在 RT-Thread 应用程序中使用 I2C 设备,你可以按照以下步骤进行配置和操作:
-
包含头文件:在应用程序中包含 I2C 相关的头文件。
#include <rtthread.h> #include <rtdevice.h> -
打开 I2C 设备:使用
rt_device_open()函数打开你需要使用的 I2C 设备。rt_device_t i2c_dev = rt_device_find("i2c1"); // 替换为你的 I2C 设备名称 rt_device_open(i2c_dev, RT_DEVICE_FLAG_RDWR); -
发送和接收数据:使用
rt_device_write()和rt_device_read()函数进行数据的发送和接收操作。uint8_t read_buf[10]; uint8_t write_buf[] = {0x01, 0x02, 0x03}; rt_device_read(i2c_dev, 0x50, 0, read_buf, sizeof(read_buf)); rt_device_write(i2c_dev, 0x50, 0, write_buf, sizeof(write_buf));这里的
i2c_dev是通过rt_device_find()函数找到的 I2C 设备结构体指针。地址参数是设备地址,可以根据你的具体设备进行设置。 -
关闭 I2C 设备:在程序结束时,记得关闭打开的 I2C 设备。
rt_device_close(i2c_dev);
完成上述步骤后,你就可以在 RT-Thread 应用程序中使用 I2C 设备进行数据的读取和写入操作了。确保根据你的硬件和具体需求进行适当的配置和编程。同时,阅读 RT-Thread 的相关文档,了解更多关于 I2C 设备的操作和配置选项。
五、GPIO 驱动
5.1 GPIO设备概述
在 RT-Thread 中,GPIO 设备用于控制和读取通用输入输出引脚。GPIO 设备是在 RT-Thread 的设备管理框架下实现的,它提供了标准的设备操作接口,使得用户可以像操作其他设备一样操作 GPIO。
下面是 GPIO 设备的一些常见操作:
-
打开 GPIO 设备:使用
rt_device_open()函数打开 GPIO 设备。rt_device_t gpio_dev = rt_device_find("gpio1"); // 替换为你的 GPIO 设备名称 rt_device_open(gpio_dev, RT_DEVICE_FLAG_INT_RX); -
配置引脚模式:使用
rt_device_control()函数配置引脚的输入输出模式,例如设置为输出模式或输入模式。rt_device_control(gpio_dev, RT_DEVICE_CTRL_GPIO_SET_MODE, (void *)GPIO_PIN_1, RT_GPIO_MODE_OUTPUT);这里的
GPIO_PIN_1是引脚的编号,可以根据你的具体硬件配置进行设置。 -
控制引脚电平:使用
rt_device_write()函数控制引脚的电平,例如设置引脚为高电平或低电平。uint8_t pin_state; rt_device_write(gpio_dev, GPIO_PIN_1, &pin_state, sizeof(pin_state));这里的
GPIO_PIN_1是引脚的编号,pin_state是控制引脚电平的变量。 -
读取引脚电平:使用
rt_device_read()函数读取引脚的电平状态。uint8_t pin_state; rt_device_read(gpio_dev, GPIO_PIN_1, &pin_state, sizeof(pin_state));这里的
GPIO_PIN_1是引脚的编号,pin_state是保存读取引脚电平的变量。 -
关闭 GPIO 设备:在程序结束时,记得关闭打开的 GPIO 设备。
rt_device_close(gpio_dev);
以上是 GPIO 设备在 RT-Thread 中的基本使用方法。你可以根据具体的硬件和应用需求,对引脚进行配置、控制电平和读取电平
5.2 使用GPIO 设备
要在 RT-Thread 应用程序中使用 GPIO 设备,可以按照以下步骤进行配置和操作:
-
包含头文件:在应用程序中包含 GPIO 相关的头文件。
#include <rtthread.h> #include <rtdevice.h> -
打开 GPIO 设备:使用
rt_device_open()函数打开你需要使用的 GPIO 设备。rt_device_t gpio_dev = rt_device_find("gpio1"); // 替换为你的 GPIO 设备名称 rt_device_open(gpio_dev, RT_DEVICE_FLAG_INT_RX); -
配置引脚模式:使用
rt_device_control()函数配置引脚的输入输出模式。rt_device_control(gpio_dev, RT_DEVICE_CTRL_GPIO_SET_MODE, (void *)GPIO_PIN_1, RT_GPIO_MODE_OUTPUT);这里的
GPIO_PIN_1是引脚的编号,可以根据你的具体硬件配置进行设置。 -
控制引脚电平:使用
rt_device_write()函数控制引脚的电平,例如设置引脚为高电平或低电平。uint8_t pin_state = 1; // 高电平 rt_device_write(gpio_dev, GPIO_PIN_1, &pin_state, sizeof(pin_state));这里的
GPIO_PIN_1是引脚的编号,pin_state是控制引脚电平的变量。 -
读取引脚电平:使用
rt_device_read()函数读取引脚的电平状态。uint8_t pin_state; rt_device_read(gpio_dev, GPIO_PIN_1, &pin_state, sizeof(pin_state));这里的
GPIO_PIN_1是引脚的编号,pin_state是保存读取引脚电平的变量。 -
关闭 GPIO 设备:在程序结束时,记得关闭打开的 GPIO 设备。
rt_device_close(gpio_dev);
通过以上步骤,你就可以在 RT-Thread 应用程序中使用 GPIO 设备进行引脚模式配置、控制引脚电平和读取引脚电平了。
5.3 注册GPIO 设备
在 RT-Thread 中注册 GPIO 设备需要进行以下步骤:
-
定义 GPIO 设备结构:首先,你需要定义一个 GPIO 设备结构,其中包含必要的成员变量和函数指针。例如:
struct rt_gpio_device { struct rt_device parent; // 继承自 rt_device 结构 // 添加你的 GPIO 设备相关成员变量 }; -
实现 GPIO 设备操作函数:根据你的硬件平台和 GPIO 设备的特性,实现 GPIO 设备操作函数。常见的操作函数包括打开设备、关闭设备、读取引脚电平、设置引脚电平等。例如:
// 打开 GPIO 设备 static rt_err_t gpio_open(rt_device_t dev, rt_uint16_t oflag) { // 实现打开设备的代码 } // 关闭 GPIO 设备 static rt_err_t gpio_close(rt_device_t dev) { // 实现关闭设备的代码 } // 读取引脚电平 static rt_size_t gpio_read(rt_device_t dev, rt_off_t pos, void *buffer, rt_size_t size) { // 实现读取引脚电平的代码 } // 设置引脚电平 static rt_size_t gpio_write(rt_device_t dev, rt_off_t pos, const void *buffer, rt_size_t size) { // 实现设置引脚电平的代码 } // 其他 GPIO 设备操作函数... -
初始化 GPIO 设备结构并注册设备:在系统初始化过程中,初始化 GPIO 设备结构,并通过
rt_device_register()函数将其注册为一个设备。例如:static struct rt_gpio_device gpio_dev; int rt_hw_gpio_init(void) { // 初始化 GPIO 设备结构 rt_memset(&gpio_dev, 0, sizeof(struct rt_gpio_device)); // 设置设备类型、名称和操作函数 gpio_dev.parent.type = RT_Device_Class_Char; gpio_dev.parent.init = gpio_init; gpio_dev.parent.open = gpio_open; gpio_dev.parent.close = gpio_close; gpio_dev.parent.read = gpio_read; gpio_dev.parent.write = gpio_write; // 其他初始化操作... // 注册 GPIO 设备 rt_device_register(&gpio_dev.parent, "gpio1", RT_DEVICE_FLAG_RDWR); return RT_EOK; }在上面的示例中,通过
rt_device_register()函数将 GPIO 设备结构注册为一个设备,并分配一个唯一的设备名称(例如 “gpio1”)。 -
编译并运行:完成 GPIO 设备的注册后,编译并运行 RT-Thread 程序。你可以在应用程序中通过设备名称获取 GPIO 设备,并使用 GPIO 设备提供的接口进行引脚的控制和读取。
请注意,以上是一个简化的 GPIO 设备注册过程示例。实际情况中,可能需要根据硬件平台和 GPIO 控制器的特性进行相应的修改和扩展。
5.4 应用程序使用GPIO设备
在应用程序中使用已注册的 GPIO 设备,你可以按照以下步骤进行:
-
包含必要的头文件:在应用程序中包含需要使用的头文件,包括 GPIO 设备的头文件和需要用到的其他相关头文件。用于 GPIO 设备的头文件通常以 “gpio.h” 或类似的命名。
#include <rtthread.h> #include <rtdevice.h> #include <gpio.h> // 假设使用的是名为 "gpio.h" 的 GPIO 设备头文件 -
获取 GPIO 设备句柄:使用
rt_device_find()函数根据设备名称获取已注册的 GPIO 设备的句柄。rt_device_t gpio_device = rt_device_find("gpio1"); if (gpio_device == RT_NULL) { rt_kprintf("Failed to find GPIO device.\n"); return; } -
打开 GPIO 设备:使用
rt_device_open()函数打开 GPIO 设备。rt_err_t ret = rt_device_open(gpio_device, RT_DEVICE_FLAG_RDWR); if (ret != RT_EOK) { rt_kprintf("Failed to open GPIO device. Error code: %d\n", ret); return; } -
控制和读取 GPIO 引脚:使用 GPIO 设备提供的接口进行 GPIO 引脚的控制和读取。根据具体的 GPIO 设备驱动和硬件平台,接口可能会有所不同。以下是一个示例,以设置 GPIO 引脚为输出和读取引脚电平为例:
// 设置引脚为输出 rt_pin_mode(0, PIN_MODE_OUTPUT); // 设置引脚电平为高电平 rt_pin_write(0, PIN_HIGH); // 延时 rt_thread_mdelay(100); // 读取引脚电平 int pin_level = rt_pin_read(0); // 输出引脚电平 rt_kprintf("GPIO pin level: %d\n", pin_level);在上面的示例中,假设 GPIO 设备对应的引脚编号是 0。具体的 GPIO 引脚编号和操作方式需要根据你的硬件平台和 GPIO 设备驱动进行相应的修改。
-
关闭 GPIO 设备:在使用完 GPIO 设备后,使用
rt_device_close()函数关闭 GPIO 设备。rt_device_close(gpio_device);
请注意,在实际应用中,你可能会根据需求添加其他逻辑,例如定时控制、中断处理等。以上步骤是一个简化的示例,具体操作方法可能需要根据你的应用场景和引脚配置进行相应的调整。同时,也要注意遵循 RT-Thread 的编程规范和 GPIO 设备的使用说明。



















 6597
6597

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











