




 本文介绍了一种求解子数组最大和的动态规划算法,时间复杂度为O(n)。通过定义dp[i]为以nums[i]结尾的连续子数组最大和,利用转移方程优化计算过程。示例中,对于数组[-2,1,-3,4,-1,2,1,-5,4],最大子数组和为6。
本文介绍了一种求解子数组最大和的动态规划算法,时间复杂度为O(n)。通过定义dp[i]为以nums[i]结尾的连续子数组最大和,利用转移方程优化计算过程。示例中,对于数组[-2,1,-3,4,-1,2,1,-5,4],最大子数组和为6。
题目链接
输入一个整型数组,数组里有正数也有负数。数组中的一个或连续多个整数组成一个子数组。求所有子数组的和的最大值。
要求时间复杂度为O(n)。
示例1:
输入: nums = [-2,1,-3,4,-1,2,1,-5,4]
输出: 6
解释: 连续子数组 [4,-1,2,1] 的和最大,为 6。
提示:
1 <= arr.length <= 10^5
-100 <= arr[i] <= 100
题解转载自本链接
动态规划是本题的最优解法,以下按照标准流程解题。
动态规划解析:
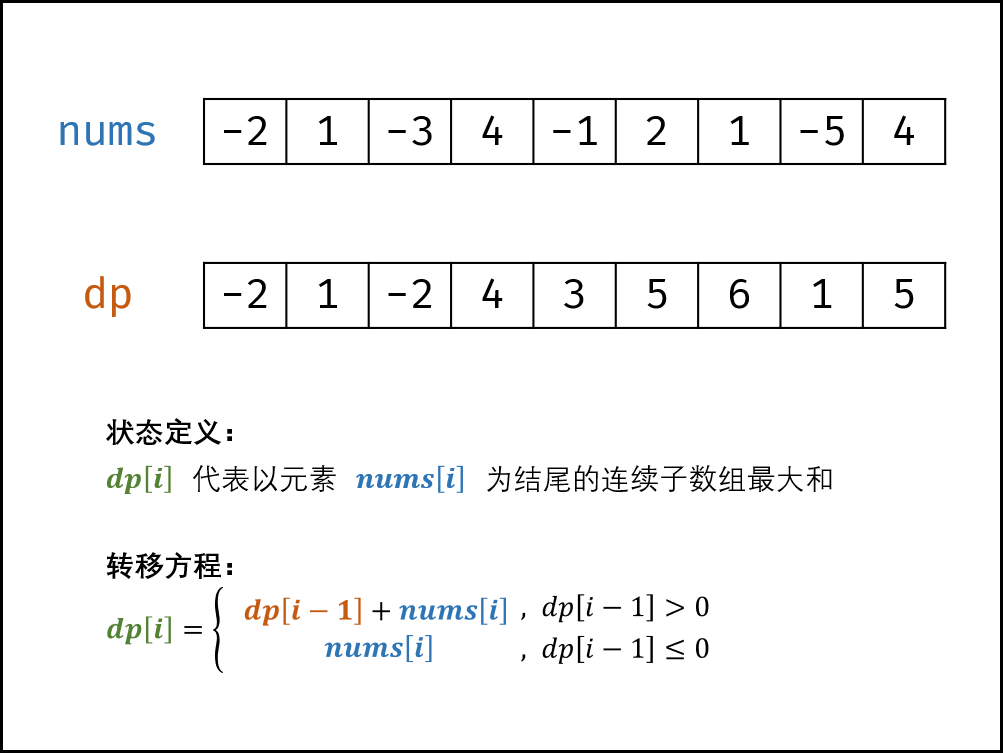
状态定义: 设动态规划列表 dp ,dp[i] 代表以元素 nums[i] 为结尾的连续子数组最大和。
为何定义最大和 dp[i] 中必须包含元素 nums[i] :保证 dp[i] 递推到 dp[i+1] 的正确性;如果不包含 nums[i] ,递推时则不满足题目的 连续子数组 要求。
转移方程: 若 dp[i−1]≤0 ,说明 dp[i−1] 对 dp[i] 产生负贡献,即 dp[i−1]+nums[i] 还不如
nums[i] 本身大。
当 dp[i−1]>0 时:执行 dp[i]=dp[i−1]+nums[i] ;
当 dp[i−1]≤0 时:执行 dp[i]=nums[i] ;
初始状态: dp[0]=nums[0],即以 nums[0] 结尾的连续子数组最大和为 nums[0] 。
返回值: 返回 dp 列表中的最大值,代表全局最大值。
代码
class Solution {
public int maxSubArray(int[] nums) {
//用于记录dp数组的最大值
int res = nums[0];
//dp[i]:以元素nums[i]为结尾的连续子数组的最大和
int[] dp = new int[nums.length];
dp[0] = nums[0];
for(int i=1; i <nums.length; i++ ){
if(dp[i-1]>0){
dp[i] = dp[i-1] + nums[i];
}
else{
dp[i] = nums[i];
}
res = Math.max(res, dp[i]);
}
return res;
}
}

















 495
495

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









