 SUSE网关配置指南
SUSE网关配置指南





1 文档编写目的
用户在使用Hadoop集群的过程中需要将集群外节点且跨操作系统(suse)的服务器配置为CDH的Gateway角色。本篇文章Fayson主要介绍在Redhat7操作系统上运行的非安全的CDH集群外,为一台suse12操作系统的节点配置为该集群的Gateway节点,且该节点不纳入Cloudera Manager管理。
2 Gateway配置过程
1.查看需要配置Gateway节点的操作系统版本

2.修改主机名
hostnamectl set-hostname cdh238.macro.com

3.将该主机添加到原集群的所有节点host文件中
sh batch_cmd.sh node.list “192.168.0.238 cdh238.macro.com”
并将cm节点的hosts文件拷贝到新节点上来:

4.创建/opt/cloudera/parcels目录
mkdir /opt/cloudera/parcels
5.上传对应CDH版本以及SUSE操作系统的parcel包

6.解压parcel包到/opt/cloudera/parcels下
tar -zxvf CDH-6.1.0-1.cdh6.1.0.p0.770702-sles12.parcel -C /opt/cloudera/parcels/
建立软连接
cd /opt/cloudera/parcels
ln -s CDH-6.1.0-1.cdh6.1.0.p0.770702 CDH

7.创建java_home目录
mkdir -p /usr/java
8.从cm节点拷贝jdk到新节点
scp -r cdh234.macro.com:/usr/java/jdk1.8.0_141-cloudera /usr/java

9.配置CDH_HOME和JAVA_HOME,并配置PATH
export JAVA_HOME=/usr/java/jdk1.8.0_141-cloudera
export CDH_HOME=/opt/cloudera/parcels/CDH
export PATH=$CDH_HOME/bin:$JAVA_HOME/bin:$PATH
更新环境变量
source /etc/profile

10.创建配置文件目录
mkdir -p /etc/spark/conf
mkdir -p /etc/hadoop/conf
mkdir -p /et/hbase/conf
mkdir -p /etc/hive/conf
mkdir -p /etc/hadoop/conf.cloudera.hdfs
mkdir -p /etc/hadoop/conf.cloudera.yarn
11.从原集群中拉取配置文件
scp -r cdh234.macro.com:/etc/hadoop/conf/* /etc/hadoop/conf
scp -r cdh234.macro.com:/etc/spark/conf/* /etc/spark/conf
scp -r cdh234.macro.com:/etc/hbase/conf/* /etc/hbase/conf
scp -r cdh234.macro.com:/etc/hive/conf/* /etc/hive/conf
scp -r cdh234.macro.com:/etc/hadoop/conf.cloudera.hdfs/* /etc/hadoop/conf.cloudera.hdfs
scp -r cdh234.macro.com:/etc/hadoop/conf.cloudera.yarn/* /etc/hadoop/conf.cloudera.yarn
3 客户端功能验证
1.HDFS命令验证
在目录下创建a.txt文件

在hdfs上新建一个目录/tmp/test

将a.txt上传到/tmp/test目录下
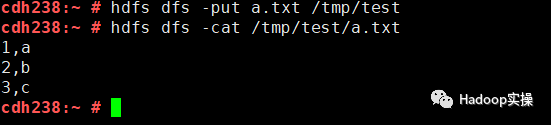
将本地的a.txt删除,从hdfs上拉取下来并查看

2.MapReduce作业验证
hadoop jar /opt/cloudera/parcels/CDH/jars/hadoop-examples.jar pi 5 5


在控制台上查看,生成了任务

3.Hive功能验证



4.Spark功能验证

5.HBase功能验证


















 773
773

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









