<?xml version="1.0" encoding="utf-8"?>
<robot
name="urdfonly">
<link
name="base_link">
</link>
<joint
name="joint_1"
type="continuous">
<origin
xyz="0 0 0.17"
rpy="3.14159265358979 0 0" />
<parent
link="base_link" />
<child
link="link_1" />
<axis
xyz="0 0 1" />
<limit
effort="7"
velocity="0.52" />
</joint>
<link
name="link_1">
<visual>
<origin
xyz="0 0 0"
rpy="0 0 0" />
<geometry>
<cylinder radius="0.05" length="0.34" />
</geometry>
<material
name="">
<color
rgba="0.86667 0.86667 0.8902 1" />
</material>
</visual>
<collision>
<origin
xyz="0 0 0"
rpy="0 0 0" />
<geometry>
<cylinder radius="0.05" length="0.34" />
</geometry>
</collision>
</link>
<joint
name="joint_2"
type="revolute">
<origin
xyz="0 -0.02 -0.1055"
rpy="-1.5707963267949 0 0" />
<parent
link="link_1" />
<child
link="link_2" />
<axis
xyz="0 0 1" />
<limit
lower="0"
upper="6.2832"
effort="14"
velocity="0.52" />
</joint>
<link
name="link_2">
<visual>
<origin
xyz="0 -0.205 0"
rpy="1.57079 0 0" />
<geometry>
<cylinder radius="0.05" length="0.50" />
</geometry>
<material
name="">
<color
rgba="1 1 1 1" />
</material>
</visual>
<collision>
<origin
xyz="0 -0.205 0"
rpy="1.57079 0 0" />
<geometry>
<cylinder radius="0.05" length="0.50" />
</geometry>
</collision>
</link>
<joint
name="joint_3"
type="revolute">
<origin
xyz="0 -0.41 0.04"
rpy="3.14159265358979 0 0" />
<parent
link="link_2" />
<child
link="link_3" />
<axis
xyz="0 0 1" />
<limit
lower="0"
upper="6.2832"
effort="5"
velocity="0.52" />
</joint>
<link
name="link_3">
<visual>
<origin
xyz="0 -0.10 0"
rpy="1.5707963267949 0 0" />
<geometry>
<cylinder radius="0.05" length="0.28" />
</geometry>
<material
name="">
<color
rgba="1 1 1 1" />
</material>
</visual>
<collision>
<origin
xyz="0 -0.10 0"
rpy="1.5707963267949 0 0" />
<geometry>
<cylinder radius="0.05" length="0.28" />
</geometry>
</collision>
</link>
<joint
name="joint_4"
type="continuous">
<origin
xyz="0 0 -0.00975"
rpy="-1.5707963267949 0 0" />
<parent
link="link_3" />
<child
link="link_4" />
<axis
xyz="0 0 1" />
<limit
effort="5"
velocity="0.52" />
</joint>
<link
name="link_4">
<visual>
<origin
xyz="0 0 -0.25"
rpy="0 0 0" />
<geometry>
<sphere radius="0.06" />
</geometry>
<material
name="">
<color
rgba="1 1 1 1" />
</material>
</visual>
<collision>
<origin
xyz="0 0 -0.25"
rpy="0 0 0" />
<geometry>
<sphere radius="0.06" />
</geometry>
</collision>
</link>
<joint
name="joint_5"
type="continuous">
<origin
xyz="0 0 -0.25001"
rpy="-1.0472 0 0" />
<parent
link="link_4" />
<child
link="link_5" />
<axis
xyz="0 0 1" />
<limit
effort="2"
velocity="0.52" />
</joint>
<link
name="link_5">
<visual>
<origin
xyz="0 0 -0.0856"
rpy="0 0 0" />
<geometry>
<sphere radius="0.06" />
</geometry>
<material
name="">
<color
rgba="1 1 1 1" />
</material>
</visual>
<collision>
<origin
xyz="0 0 -0.0856"
rpy="0 0 0" />
<geometry>
<sphere radius="0.06" />
</geometry>
</collision>
</link>
<joint
name="joint_6"
type="continuous">
<origin
xyz="0 0 -0.085514"
rpy="1.0472 0 0" />
<parent
link="link_5" />
<child
link="link_6" />
<axis
xyz="0 0 1" />
<limit
effort="2"
velocity="0.52" />
</joint>
<link
name="link_6">
<visual>
<origin
xyz="0 0 -0.10"
rpy="0 0 0" />
<geometry>
<sphere radius="0.07" />
</geometry>
<material
name="">
<color
rgba="0.1098 0.1098 0.1098 1" />
</material>
</visual>
<collision>
<origin
xyz="0 0 -0.10"
rpy="0 0 0" />
<geometry>
<sphere radius="0.07" />
</geometry>
</collision>
</link>
<joint
name="joint_7"
type="fixed">
<origin
xyz="0 0 -0.2"
rpy="3.14159265358979 0 1.5707963267949" />
<parent
link="link_6" />
<child
link="link_7" />
<axis
xyz="0 0 0" />
</joint>
<link
name="link_7">
</link>
</robot>







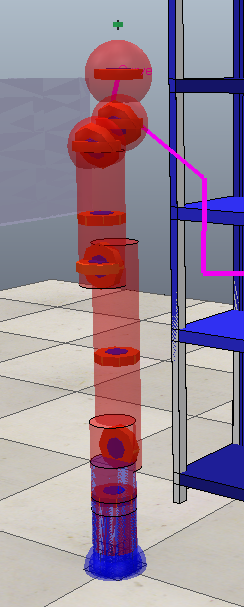
 这是一个关于机器人操作系统(ROS)中通用机器人描述格式(URDF)的XML文件,展示了机器人从基座到多个连杆及关节的详细结构。文件包含了连杆的几何形状、材质、碰撞模型以及各个连续和旋转关节的定义,包括关节类型、位置、限制和速度等参数。
这是一个关于机器人操作系统(ROS)中通用机器人描述格式(URDF)的XML文件,展示了机器人从基座到多个连杆及关节的详细结构。文件包含了连杆的几何形状、材质、碰撞模型以及各个连续和旋转关节的定义,包括关节类型、位置、限制和速度等参数。



















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









