






 本文探讨了3D人体姿态估计中的坐标系转换问题,重点介绍了世界坐标系与相机坐标系之间的转换方法,包括旋转和平移的过程,并提供了转换矩阵的详细推导。
本文探讨了3D人体姿态估计中的坐标系转换问题,重点介绍了世界坐标系与相机坐标系之间的转换方法,包括旋转和平移的过程,并提供了转换矩阵的详细推导。
世界坐标系和相机坐标系的转换
在研究3D人体姿态估计的过程中,碰到了坐标系的转换问题,所以深入的研究和分析了一下这个部分的转换过程
世界坐标系主要是现实世界相机的位置,一般坐标原点在左相机或者右相机或者两个相机x轴方向的中心位置上面。
相机坐标系的坐标原点在光心的位置,Z轴垂直与光心所在平面。
所谓坐标系的转换其实也坐标系进行一个平移和旋转,坐标点在另外一个坐标系下的位置问题,本质上面坐标点的位置没有变换,只是点的坐标发生了变化。
世界坐标系和相机坐标系的转换问题:
首先介绍旋转过程。下图为世界坐标系绕z轴旋转模型:
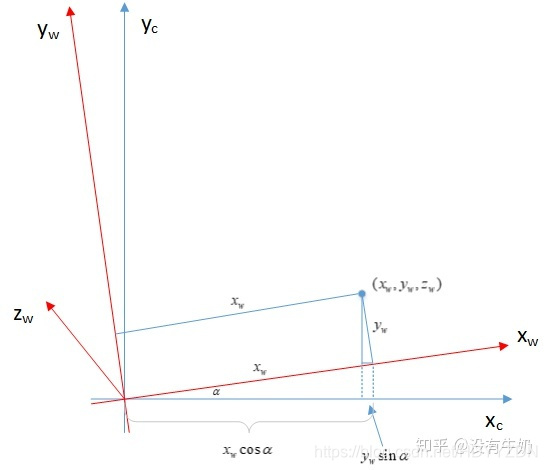
世界坐标系为Xw-Yw-Zw 相机坐标系为Xc-Yc-Zc ,当前一个世界坐标系中一个坐标点位置为 (Xw,Yw,Zw),在相机坐标系下Xc= ,Yc=
,由于围绕z轴旋转,故
,
写成矩阵的形式如下
其中, 3*3的变换矩阵称为 r1 。
同样的,可以得到关于x轴,y轴旋转的变换矩阵 r2, r3 。而总的旋转矩阵为R=r1*r2*r3 。
平移则相对简单,只需在旋转后的基础上加上一个平移量 ti即可。
综上,即可得世界坐标系到相机坐标系的变换为
R为旋转矩阵 即 为一个正交矩阵,正交矩阵的逆=正交矩阵的转置
那么利用 就可以得到Xw和Xc的关系了,也就是相机坐标系转化为世界坐标系
解析了我会利用空闲时间,将相应的python 代码附上,
如果有什么错误请踊跃指正。

















 2255
2255

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









