







 本文介绍了如何在Prescan中利用OpenDRIVE和OpenStreetMap导入道路信息进行无人驾驶仿真。尽管OpenDRIVE文档较旧,而OpenStreetMap导入存在精度问题,但这些功能仍能帮助提升仿真环境的真实感。导入后可能需要大量手工调整,以确保仿真效果接近现实。
本文介绍了如何在Prescan中利用OpenDRIVE和OpenStreetMap导入道路信息进行无人驾驶仿真。尽管OpenDRIVE文档较旧,而OpenStreetMap导入存在精度问题,但这些功能仍能帮助提升仿真环境的真实感。导入后可能需要大量手工调整,以确保仿真效果接近现实。
前面提到Prescan自带比较全的模型库,能够方便用户快速构建仿真场景,但个人经验看来,手工YY搭建的仿真环境和实际差别较大,很多情况都是理想状态,难以反映真实情况,从而降低了仿真的价值。直白点,虚拟仿真结果都是OK的,但上路就撞到人。
值得高兴的是Prescan提供了一些数据的导入功能:
OpenDRIVE Network...、OpenStreetMap,GPS Track...
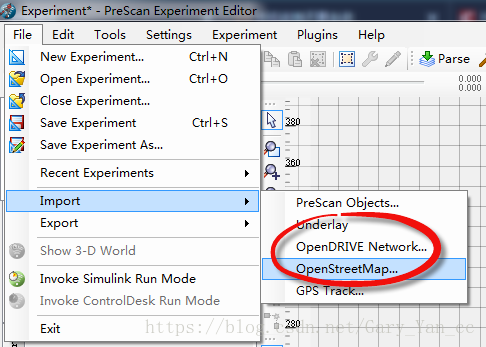
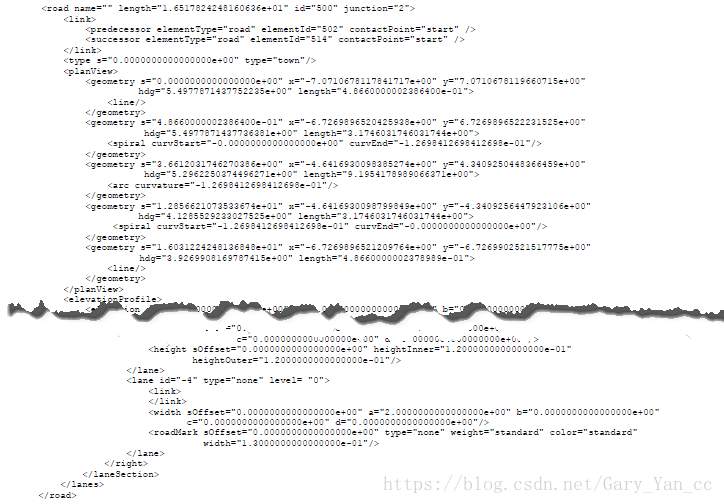
1、OpenDRIVE Network...
看起来有点失望,官网没有太多的信息,只有一个2015年版本的文档,估计后面没啥戏了,看起来就是XML数据
官方网址:http://www.opendrive.org/
2、OpenStreetMap
官网:https://www.openstreetmap.org
这个可以给大家试一下
第一步:打开网站,找一块区域,这里找一块我家附近的道路
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章

















 1643
1643

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









