







 超级会员免费看
超级会员免费看
MPI效应
百科里解释信号在传播过程中,受一些物体的反射,而改变了信号的传播方向、振幅、极化以及相位等,这些变化了的信号到达接收端,与通过直线路径到达接收端的信号产生叠加,称为多路径效应。
这里面包括材质属性(比如高反材料反射),环境照明,散射介质,几何原因等都会引起多路径干扰,造成测距失真变成噪点飞点。如何克服或者缓解各种场景以及一些始料未及的场景的多路径干扰,是一个挑战,同时也是你这个产品在同行业中出类拔萃,成为卖点的重要因素。
只要有投射模块发射信号,理论上都有多路径干扰,包括卫星信号,itof,dtof,结构光等,只不过是严重影响程度而已。
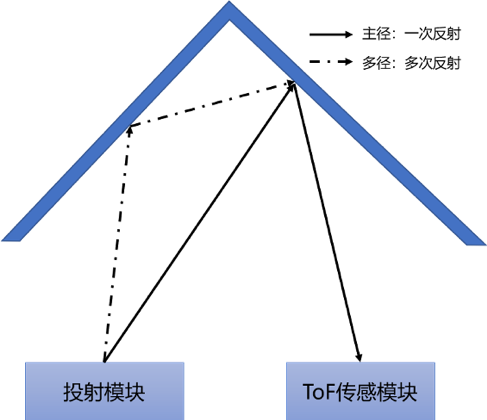
在图里可以看到,跟tx相关的实线是直线路径,跟tx相关的虚线是产生了两次反射的多路径效应。很明显虚线产生的测量值会偏大,明显大于真实值,并且不好标定,严重影响三维重建的效果。
itof多路径干扰
多路径是itof的一个致命缺陷,在最大的扫地机应用当中,成为诟病的槽点。因为多路径会产生错误的测距信息,导致平面扭曲,很难避障,造成扫地机装上物体。因为itof很难在源头缓解根治办法,比如ADI和PMD的产品,虽然实现了量产,但其实不少厂商寻求替换方案。

 订阅专栏 解锁全文
订阅专栏 解锁全文


















 102
102

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









