






 本文介绍了Python字典的基本概念,包括其特点、创建方式、访问与修改元素的方法,以及如何删除字典元素等内容,并提供了丰富的实例。
本文介绍了Python字典的基本概念,包括其特点、创建方式、访问与修改元素的方法,以及如何删除字典元素等内容,并提供了丰富的实例。
Python 字典
字典是另一种可变容器模型,且可存储任意类型对象。
字典的每个键值 key=>value 对用冒号 : 分割,每个键值对之间用逗号 , 分割,整个字典包括在花括号 {} 中 ,格式如下所示:

键必须是唯一的,但值则不必。
值可以取任何数据类型,但键必须是不可变的,如字符串,数字或元组。
一个简单的字典实例:

也可如此创建字典:

访问字典里的值
把相应的键放入熟悉的方括弧,如下实例:

以上实例输出结果:

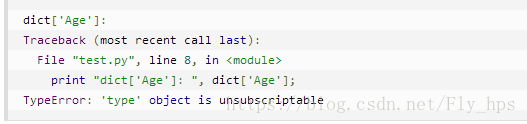
如果用字典里没有的键访问数据,会输出错误如下:

以上实例输出结果:

修改字典
向字典添加新内容的方法是增加新的键/值对,修改或删除已有键/值对如下实例:

以上实例输出结果:

删除字典元素
能删单一的元素也能清空字典,清空只需一项操作。
显示删除一个字典用del命令,如下实例:
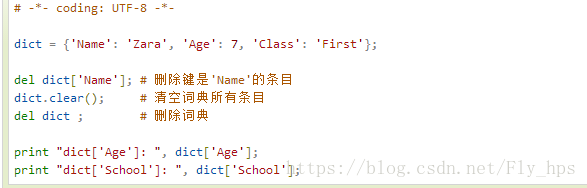
但这会引发一个异常,因为用del后字典不再存在:
注:del()方法后面也会讨论。
字典键的特性
字典值可以没有限制地取任何python对象,既可以是标准的对象,也可以是用户定义的,但键不行。
两个重要的点需要记住:
1)不允许同一个键出现两次。创建时如果同一个键被赋值两次,后一个值会被记住,如下实例:

以上实例输出结果:

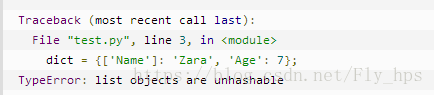
2)键必须不可变,所以可以用数字,字符串或元组充当,所以用列表就不行,如下实例:

以上实例输出结果:
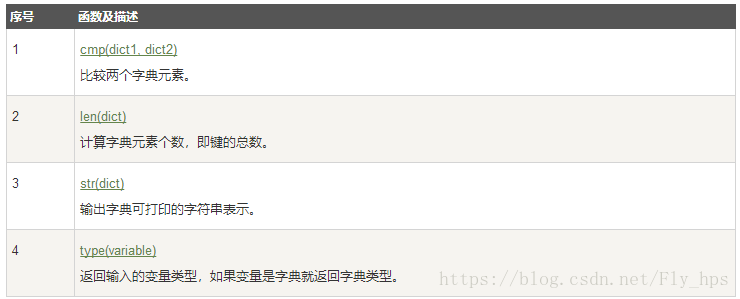
字典内置函数&方法
Python字典包含了以下内置函数:
Python字典包含了以下内置方法:



















 1362
1362

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









