






 本文深入探讨机器学习中的过拟合与欠拟合现象,解释了两种情况下的模型表现,分析了过拟合的原因,如数据量不足、噪声过大及模型复杂度过高等,并提出了有效解决方案,包括从简单模型开始、数据清洗、数据提示、正则化及验证等策略。
本文深入探讨机器学习中的过拟合与欠拟合现象,解释了两种情况下的模型表现,分析了过拟合的原因,如数据量不足、噪声过大及模型复杂度过高等,并提出了有效解决方案,包括从简单模型开始、数据清洗、数据提示、正则化及验证等策略。
过拟合与欠拟合(under & over)
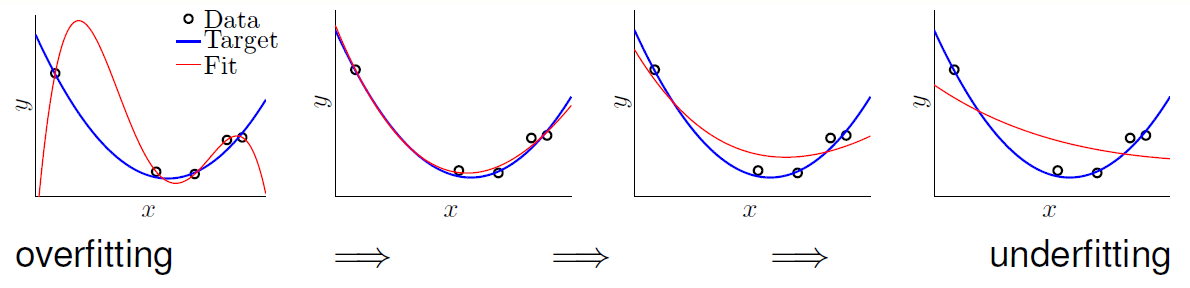
欠拟合(underfitting): EinE_{\text {in}}Ein较高,EoutE_{\text {out}}Eout也较高。
过拟合(overfitting): EinE_{\text {in}}Ein较低,EoutE_{\text {out}}Eout却较高。(例如数据中有噪声,却使用了高次多项式非线性转换,便会出现过拟合)
常见的过拟合原因有:数据量(data size)太少,随机噪声(stochastic noise)太大,目标函数(deterministic noise)太复杂,dvc过高(excessive power)。
示例如下:
一般而言欠拟合很好处理。过拟合却很难解决,比较实用的解决方案有以下五个:
- start from simple model(从简单的模型开始)
- data cleaning/pruning(数据清理和裁剪)
- data hinting(数据提示)
- regularization(正则化)
- validation(验证)
其中数据清理实际上就是纠正数据错误,而数据裁剪便是删除无用或冗余样本。而数据提示则是数据构造(加入构造样本),以图像处理为例:可以通过移动或旋转(shifting/rotating)已知图像构造虚拟样本数据。
下面介绍两个实用的工具正则化与验证。
正则化(Regularization)
正则化的本质是减少无用项的比重,从而减小 $d_{\mathbf{vc}} $ ,进而抑制过拟合。最理想的状态是通过学习使得某些不重要的项的系数为0,但是这是一种 NP-hard 问题,所以降低要求至减小比重。
minw∈RQ+1Ein (w)=1N∑n=1N(wTzn−yn)2⏟(Zw−y)T(Zw−y) s.t. ∑q=0Qwq2⏟wTw≤C
\begin{array} { r l } \min _ { \mathbf { w } \in \mathbb { R } ^ { Q + 1 } } & E _ { \text {in } } ( \mathbf { w } ) = \frac { 1 } { N } \underbrace { \sum _ { n = 1 } ^ { N } \left( \mathbf { w } ^ { T } \mathbf { z } _ { n } - y _ { n } \right) ^ { 2 } } _ { ( \mathbf { Z } \mathbf { w } - \mathbf { y } ) ^ { T } ( \mathbf { Z } \mathbf { w } - \mathbf { y } ) } \\ \text { s.t. } & \underbrace { \sum _ { q = 0 } ^ { Q } w _ { q } ^ { 2 } } _ { \mathbf { w } ^ { T } \mathbf { w } } \leq C \end{array}
minw∈RQ+1 s.t. Ein (w)=N1(Zw−y)T(Zw−y)n=1∑N(wTzn−yn)2wTwq=0∑Qwq2≤C
这个限制实际上是将比重系数限制在半径为 C\sqrt{C}C 的球体内。所以优化结果转换为 regularized hypothesis wREG\mathbf{w}_{REG}wREG(optimal solution from regularized hypothesis set H(C)H(C)H(C))。
可见这是一个有条件最优化问题,经典的解法是使用拉格朗日乘数。即找一个拉个朗日乘数(Lagrange multiplier)λ>0\lambda > 0λ>0 和 wREG\mathbf { w } _ { \mathrm { REG } }wREG 使得:
∇Ein (wREG)+2λN∣wREG∣=0
\nabla E _ { \text {in } } \left( \mathbf { w } _ { \mathrm { REG } } \right) + \frac { 2 \lambda } { N } \left| \mathbf { w } _ { \mathrm { REG } } \right| = \mathbf { 0 }
∇Ein (wREG)+N2λ∣wREG∣=0
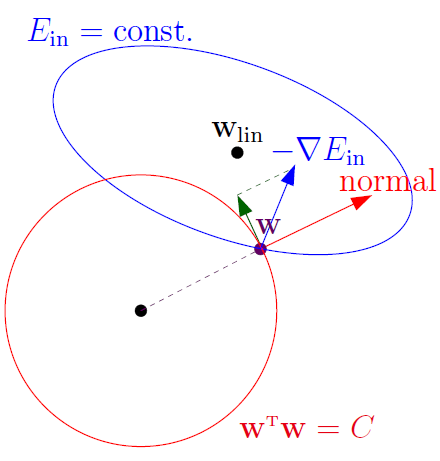
图解拉格朗日乘数(Lagrange Multiplier)法
当现在有一个球需要向负梯度方向(谷底)滚,但是呢现在有一个限制条件,不能超出半径为 C\sqrt{C}C 的球,所以在球的最佳位置是满足条件且不能往下滚,现在有两种状态一种是谷底在这个限制的球内,那么无所谓。如果在球外呢,便需要找出一个球边界上的点,并且该点的负梯度方向为球切面的法向量,这样的话便会满足条件且无法滚动(会导致出界)。
根据上述拉格朗日乘数方程,可以写出:
∇Ein(wREG)+2λNwREG=02N(ZTZWREG−ZTy)+2λNWREG=0
\nabla E _ { \mathrm { in } } \left( \mathbf { w } _ { \mathrm { REG } } \right) + \frac { 2 \lambda } { N } \mathbf { w } _ { \mathrm { REG } } = \mathbf { 0 }\\
\frac { 2 } { N } \left( \mathrm { Z } ^ { T } \mathrm { ZW } _ { \mathrm { REG } } - \mathrm { Z } ^ { T } \mathbf { y } \right) + \frac { 2 \lambda } { N } { \mathbf { W } _ { \mathrm { REG } } } = \mathbf { 0 }
∇Ein(wREG)+N2λwREG=0N2(ZTZWREG−ZTy)+N2λWREG=0
可以看出这是根据 wREG\mathbf { w } _ { \mathrm { REG }}wREG 的 一个一元一次线性方程,所以可以解得:
wREG←(ZTZ+λI)−1ZTy
\mathbf { w } _ { \mathrm { REG } } \leftarrow \left( \mathrm { Z } ^ { T } \mathrm { Z } + \lambda \mathrm { I } \right) ^ { - 1 } \mathrm { Z } ^ { T } \mathbf { y }
wREG←(ZTZ+λI)−1ZTy
这个在统计上叫做岭回归(ridge regression)。其中ZTZ\mathrm { Z } ^ { T } \mathrm { Z }ZTZ是正半定的,λI\lambda \mathrm { I }λI是正定的,所以两者相加一定有逆。
实际上上述拉格朗日乘数方程,等同于下面这个优化问题
Ein (w)+λNwTw⏞regularier⏟augmented error Eaug
E _ { \text {in } } ( \mathbf { w } ) + \underbrace{\frac { \lambda } { N } \overbrace { \mathbf { w } ^ { T } \mathbf { w } }^{\text{regularier}}}_{\text{augmented error } E _ { \text {aug } }}
Ein (w)+augmented error Eaug NλwTwregularier
所以将有约束的最优化问题转换为用扩大误差的正则化(regularization with augmented error instead of constrained EinE_{\text{in}}Ein)
wREG←argminwEaug for given λ>0 or λ=0 \mathbf { w } _ { \mathrm { REG }} \leftarrow \mathop { \text{argmin} }_{\mathbf{w}} E _ { \text {aug } } \text{ for given }\lambda > 0 \text { or } \lambda = 0 wREG←argminwEaug for given λ>0 or λ=0
即最小化无约束 Eaug E _ { \text {aug } }Eaug 可以有效的最小化有约束的EinE_{\text{in}}Ein (minimizing unconstrained Eaug E _ { \text {aug } }Eaug effectively minimizes some C-constrained EinE_{\text{in}}Ein.)
因为该正则化方法有效的减小了无用项权重系数的大小,所以 +λNwTw+ \frac { \lambda } { N } \mathbf { w } ^ { T } \mathbf { w }+NλwTw 又叫做权重衰减正则化(weight-decay regularization)。
知识拓展:勒让德多项式(Legendre polynomials)
minw∈RQ+11N∑n=0N(wTΦ(xn)−yn)2+λN∑q=0Qwq2 \min _ { \mathbf { w } \in \mathbb { R } ^ { Q + 1 } } \frac { 1 } { N } \sum _ { n = 0 } ^ { N } \left( \mathbf { w } ^ { T } \mathbf { \Phi } \left( x _ { n } \right) - y _ { n } \right) ^ { 2 } + \frac { \lambda } { N } \sum _ { q = 0 } ^ { Q } w _ { q } ^ { 2 } w∈RQ+1minN1n=0∑N(wTΦ(xn)−yn)2+Nλq=0∑Qwq2
单纯的多项式转换(naïve polynomial transform):
Φ(x)=(1,x,x2,…,xQ)
\Phi ( x ) = \left( 1 , x , x ^ { 2 } , \ldots , x ^ { Q } \right)
Φ(x)=(1,x,x2,…,xQ)
当xn∈[−1,+1],xnqx _ { n } \in [ - 1 , + 1 ] , x _ { n } ^ { q }xn∈[−1,+1],xnq 非常小,需要很大的 wq\mathbf{w}_qwq,但是正则化项却限制了这一行为。这时便提出另一种多项式转换: 归一化多项式转换(normalized polynomial transform):
Φ(x)=(1,L1(x),L2(x),…,LQ(x))
\Phi ( x ) = \left( 1 , L _ { 1 } ( x ) , L _ { 2 } ( x ) , \ldots , L _ { Q } ( x ) \right)
Φ(x)=(1,L1(x),L2(x),…,LQ(x))
这叫 正交基函数 ‘orthonormal basis functions’,该多项式叫做勒让德多项式(Legendre polynomials)。
与 VC 理论的关系
minimizing Eaug E _ { \text {aug } }Eaug 的三个不同的理解
- indirectly getting VC guarantee without confining to H(C)H(C)H(C).
即在不设置限制条件的状态下,间接的获得保证VC的安全性。 - (heuristically) operating with Eaug E _ { \text {aug } }Eaug ( a better proxy of EoutE _ { \text {out} }Eout than EinE _ { \text {in} }Ein ); (technically) enjoying flexibility of whole HHH.
Eaug E _ { \text {aug } }Eaug 相比 EinE _ { \text {in} }Ein 可以更好的代表 EoutE _ { \text {out} }Eout,实际上就是用权重惩罚项 Ω(w)\Omega(\mathbf{w})Ω(w) 代替模型复杂度惩罚项 Ω(H)\Omega(H)Ω(H),并且可以在全部的 HHH 中找寻有用的 hypothesis。 - dvc(H)d_{\mathbf{vc}}(H)dvc(H) large, while dEFF(H;A⏟minEaug )=dvc(H(C))d_{\mathbf{EFF}}(H;\underbrace{\mathcal{A}}_{\min E _ { \text {aug } }}) = d_{\mathbf{vc}}(H(C))dEFF(H;minEaug A)=dvc(H(C)) small if A regularized
显而易见的是当使用 regularization 后,会降低模型的复杂度,即降低 dvc(H)d_{\mathbf{vc}}(H)dvc(H)。
常用的正则化(General Regularizers)
正则化的目标是限制目标函数的 ‘ 学习方向 ’(constraint in the ‘direction’ of target function)。
正则化有三个特性:
- target-dependent:some properties of target(应该目标函数的属性或者范围有关)
- plausible:direction towards smoother or simpler (应该是合理的,让算法筛选出比较光滑或简单的hypothesis)
- friendly: easy to optimize (比较友好,更容易优化)
值得注意的是正则项中的的 λ\lambdaλ 可以控制正则项的权重或者影响,如果感觉正则项有不好的影响的话,可以尝试调低λ\lambdaλ 。
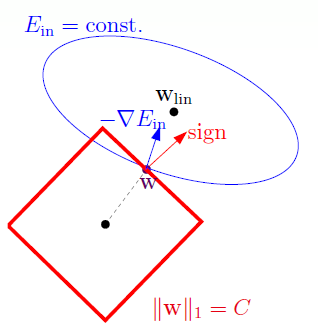
L1范数正则化(L1 Regularizer)
示意图如下:
其惩罚项表达式如下:
Ω(w)=∑q=0Q∣wq∣=∥w∥1
\Omega ( \mathbf { w } ) = \sum _ { q = 0 } ^ { Q } \left| w _ { q } \right| = \| \mathbf { w } \| _ { 1 }
Ω(w)=q=0∑Q∣wq∣=∥w∥1
可见这是一个凸函数(convex,),但不是随处可微的(not differentiable everywhere,比如顶点上)。值得注意的是其解的稀疏性(sparsity in solution),这是因为最优解常常在顶点上,也就是说某些项为零。所以说L1范数正则化常常用于稀疏解(sparse solution)。
L2范数正则化(L2 Regularizer)
示意图如下:
其惩罚项表达式如下:
Ω(w)=∑q=0Qwq2=∥w∥22
\Omega ( \mathbf { w } ) = \sum _ { q = 0 } ^ { Q } w _ { q } ^ { 2 } = \| \mathbf { w } \| _ { 2 } ^ { 2 }
Ω(w)=q=0∑Qwq2=∥w∥22
因为该正则化方法有效的减小了无用项权重系数的大小,所以 L2 范数正则化又叫做权重衰减正则化(weight-decay regularization)。
最佳(Optimal)λ\lambdaλ
在随机噪声(stochastic noise)下的λ\lambdaλ 调节曲线图:
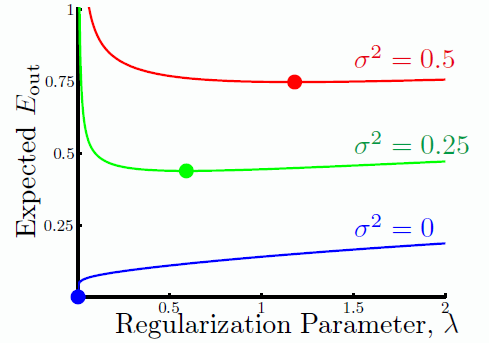
在确定噪声(deterministic noise)下的λ\lambdaλ 调节曲线图:
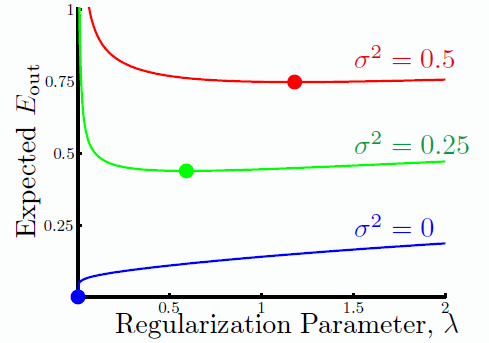
可见噪声越大,应当使用更多的正则化。但是噪声是不知道,如何进行选择呢,这便用到了下一节课的交叉验证进行模型选择了。
验证(Validation)
模型选择(Model Selection)
验证实际上就是为了解决模型选择的问题(Model Selection Problem),当然在可行性分析时有证明说,当 NNN (数据量)足够多时,机器学习可以保证Ein≈Eout,Ein≈0E_{\text {in}} \approx E_{\text {out}}, E_{\text {in}} \approx 0Ein≈Eout,Ein≈0,即 Eout≈0E_{\text {out}} \approx 0Eout≈0 所以说呢,只需要保证最佳的 EinE_{\text {in}}Ein 即可。但是这有一个前提那就是 NNN (数据量)足够多,实际生活中真的能保证数据足够多吗,答案是并不能,而且很有可能会为此付出过拟合的代价。
一个简答的方法便是针对测试集进行测试,验证模型的准确率。即使用 Dtest \mathcal{D} _ { \text {test } }Dtest 去求取 Etest E _ { \text {test } }Etest ,从而选择最优的模型。
m∗=argmin1≤m≤M(Em=Etest (Am(D)))
m ^ { * } = \underset { 1 \leq m \leq M } { \operatorname { argmin } } \left( E _ { m } = E _ { \text {test } } \left( \mathcal { A } _ { m } ( \mathcal { D } ) \right) \right)
m∗=1≤m≤Margmin(Em=Etest (Am(D)))
并且可以保证泛化性(generalization guarantee),可以通过有限海弗丁不等式 (finite-bin Hoeffding)求得:
Eout(gm∗)≤Etest(gm∗)+O(logMNtest)
E _ { \mathrm { out } } \left( g _ { m ^ { * } } \right) \leq E _ { \mathrm { test } } \left( g _ { m ^ { * } } \right) + O ( \sqrt { \frac { \log M } { N _ { \mathrm { test } } } } )
Eout(gm∗)≤Etest(gm∗)+O(NtestlogM)
但是真的可以使用 Etest E _ { \text {test } }Etest 来测试,答案仍然是否定的,因为 Dtest \mathcal{D} _ { \text {test } }Dtest 是无法获得的(infeasible & cheating)。
所以这里提出一种想法 通过验证集(validation set) Dval∈D,Dval∼ iid P(x,y),select K examples from D at random\mathcal { D }_{\text{val}} \in \mathcal { D },\mathcal { D } _ { \mathrm { val } } \stackrel { \text { iid } } { \sim } P ( \mathbf { x } , y ),\text{select K examples from } \mathcal{D} \text { at random}Dval∈D,Dval∼ iid P(x,y),select K examples from D at random,计算$ E_{\text{val}}$,来筛选模型,但是 Dval\mathcal { D }_{\text{val}}Dval 不可被Am\mathcal { A }_{\text{m}}Am(学习算法)用于模型训练,也就是说Dval∩Dtrain=∅,Dval∪Dtrain=D\mathcal { D }_{\text{val}} \cap \mathcal { D }_{\text{train}} = \empty , \mathcal { D }_{\text{val}} \cup \mathcal { D }_{\text{train}} = \mathcal { D }Dval∩Dtrain=∅,Dval∪Dtrain=D。这样一来保证了验证数据不可知(干净,clean),二来验证数据是可以获得的,是一种合法的欺骗(legal cheating)。
基本的结构如下所示:
Ein(h)Eval(h)↑↑D⏟size N→Dtrain ⏟size N−K∪Dval ⏟size K↓↓gm=Am(D)gm−=Am(Dtrain )
\begin{array}{ c c c c c }
E_{\text {in}}(h) &&&& E_{\text {val}}(h)\\
\uparrow &&&& \uparrow \\
\underbrace { \mathcal { D } } _ { \text {size } N } &\rightarrow &\underbrace { \mathcal { D } _ { \text {train } } } _ { \text {size } N - K } &\cup &\underbrace { \mathcal { D } _ { \text {val } } } _ { \text {size } K }\\
\downarrow && \downarrow && \\
g _ { m } = \mathcal { A } _ { m } ( \mathcal { D } ) &&g _ { m } ^ { - } = \mathcal { A } _ { m } \left( \mathcal { D } _ { \text {train } } \right)&&
\end{array}
Ein(h)↑size ND↓gm=Am(D)→size N−KDtrain ↓gm−=Am(Dtrain )∪Eval(h)↑size KDval
最终使用海弗丁不等式可以保证:
Eout(gm−)≤Eval(gm−)+O(logMK)
E _ { \mathrm { out } } \left( g _ { m } ^ { - } \right) \leq E _ { \mathrm { val } } \left( g _ { m } ^ { - } \right) + O ( \sqrt { \frac { \log M } { K } } )
Eout(gm−)≤Eval(gm−)+O(KlogM)
从 N−KN - KN−K 到 NNN 的启发式增益(heuristic gain)变化为:
Eout (gm∗⏟Am∗(D))≤Eout (gm∗−⏟Am∗(Dtann ))
E _ { \text {out } } ( \underbrace { g _ { m ^ { * } } } _ { A _ { m ^ { * } } ( \mathcal { D } ) } ) \leq E _ { \text {out } } ( \underbrace { g _ { m ^ { * } } ^ { - } } _ { A _ { m ^ { * } } \left( \mathcal { D } _ { \text {tann } } \right) } )
Eout (Am∗(D)gm∗)≤Eout (Am∗(Dtann )gm∗−)
进一步可以得出以下关系:
Eout(gm∗)≤Eout(gm∗−)≤Eval(gm∗−)+O(logMK)
E _ { \mathrm { out } } \left( g _ { m ^ { * } } \right) \leq E _ { \mathrm { out } } \left( g _ { m ^ { * } } ^ { - } \right) \leq E _ { \mathrm { val } } \left( g _ { m ^ { * } } ^ { - } \right) + O ( \sqrt { \frac { \log M } { K } } )
Eout(gm∗)≤Eout(gm∗−)≤Eval(gm∗−)+O(KlogM)
即训练数据越多,学习算法选择的 ggg (best hypothesis)便越好。所以实用的验证使用流图如下,在获得 gm∗−g _ { m ^ { * } } ^ { - }gm∗− 后再求取gm∗g _ { m ^ { * } }gm∗,一般来说会获得更优的效果:
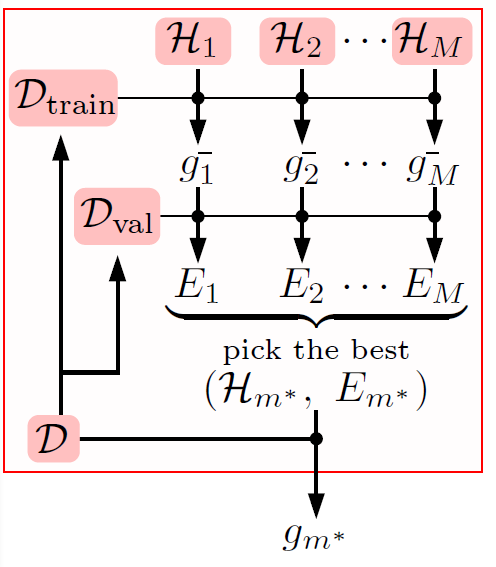
那在实际中K应当如何选择呢,下面以在 HΦ5\mathcal { H } _ { \boldsymbol { \Phi } _ { 5 } }HΦ5 和 HΦ10\mathcal { H } _ { \boldsymbol { \Phi } _ { 10 } }HΦ10 选择最优模型为例,变化曲线图如下:
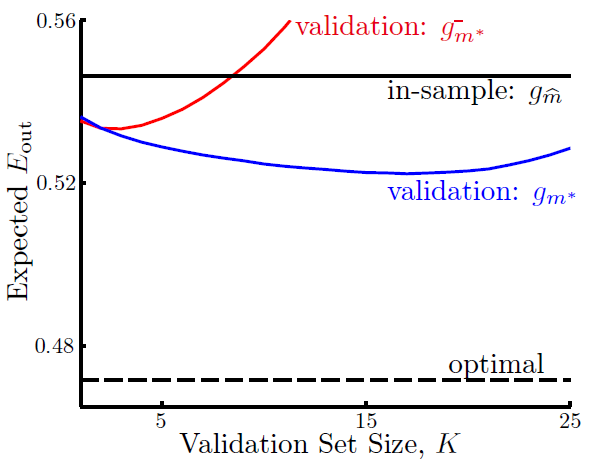
其中 gm^g_{\hat m}gm^ 指的是使用 EinE_{\text{in}}Ein 选择最优模型,gm∗−g _ { m ^ { * } } ^ { - }gm∗− 指的是使用 EvalE_{\text{val}}Eval 选择和使用 Dtrain\mathcal{D}_{\text{train}}Dtrain 训练的最优模型,gm∗g _ { m ^ { * } }gm∗ 指的是使用 EvalE_{\text{val}}Eval 选择和使用 D\mathcal{D}D 训练的最优模型,而 optimal 指的是使用 EtestE_{\text{test}}Etest 选择的最优模型输出的 EoutE_{\text{out}}Eout(不可能达到的最优值)。
可见 Eout(gm∗−)>Eout(gm∗)E_{\text{out}}(g _ { m ^ { * } } ^ { - }) > E_{\text{out}}(g _ { m ^ { * } } )Eout(gm∗−)>Eout(gm∗),证明了使用验证集进行模型选择的可行性。
同时随着验证集大小 KKK 的增加, gm∗−g _ { m ^ { * } } ^ { - }gm∗− 的 EoutE_{\text{out}}Eout 不断增加,这是由于验证集越大,训练集越小,训练出来的模型精度越差(ggg 与 g−g^-g−的差距越大)。而验证集越小,训练集越大,在全局数据下模型精度越高(ggg 与 g−g^-g−的差距越小)。这便是矛盾的地方,因为当验证集越大时,g−g^-g−的 EoutE_{\text{out}}Eout 与 EvalE_{\text{val}}Eval 更相近,即 EvalE_{\text{val}}Eval 更能代表 EoutE_{\text{out}}Eout 但不能代表 ggg 的 EoutE_{\text{out}}Eout。
Eout (g)≈(small K)Eout (g−)≈(big K)Eval (g−)
E _ { \text {out } } ( g ) \quad \mathop{\approx}_{(\text{small }K)} \quad E _ { \text {out } } \left( g ^ { - } \right) \quad \mathop{\approx}_{(\text{big }K)} \quad E _ { \text {val } } \left( g ^ { - } \right)
Eout (g)≈(small K)Eout (g−)≈(big K)Eval (g−)
实践经验(practical rule of thumb)选择:K=N5K = \frac{N}{5}K=5N。
Leave-One-Out ( LOO ) Cross Validation
那怎么才能使得Eval (g−)≈Eout(g)E _ { \text {val } }(g^{-}) \approx E _ { \mathrm { out } } ( g )Eval (g−)≈Eout(g)呢,这便是LOO交叉验证的由来:
Eloocv (H,A)=1N∑n=1Nen=1N∑n=1Nerr(gn−(xn),yn)≈hopeEout(g)
E _ { \text {loocv } } ( \mathcal { H } , \mathcal { A } ) = \frac { 1 } { N } \sum _ { n = 1 } ^ { N } e _ { n } = \frac { 1 } { N } \sum _ { n = 1 } ^ { N } \operatorname { err } \left( g _ { n } ^ { - } \left( \mathbf { x } _ { n } \right) , y _ { n } \right) \mathop{\approx}^{\text{hope}} E_{\text{out}}(g)
Eloocv (H,A)=N1n=1∑Nen=N1n=1∑Nerr(gn−(xn),yn)≈hopeEout(g)
实际上就是每次取出一个样本作为验证集,使用剩下的 N−1N-1N−1 个作为训练集,计算 Eval E _ { \text {val }}Eval ,最后针对全部的样本计算平均值。下面进行证明(ED\mathop{\mathcal { E }} _ { \mathcal { D } }ED 指的是在数据集D\mathcal{D}D上取结果的平均):
EDEloocv(H,A)=ED1N∑n=1Nen=1N∑n=1NEDen→由于独立同分布(iid)所以ED可拆为EDnE(xn,yn)=1N∑n=1NEDnE(xn,yn)err(gn−(xn),yn)⏟=1N∑n=1NEDnEout (gn−)→一个固定的g在各式各样的样本下的误差均值=1N∑n=1NEout ‾(N−1)=Eout ‾(N−1) \begin{aligned} \mathop{\mathcal { E }} _ { \mathcal { D } } E _ { \operatorname { loocv } } ( \mathcal { H } , \mathcal { A } ) &= \mathop{\mathcal { E }} _ { \mathcal { D } } \frac { 1 } { \mathcal { N } } \sum _ { n = 1 } ^ { N } e _ { n } = \frac { 1 } { N } \sum _ { n = 1 } ^ { N } \mathop{\mathcal { E }} _ { \mathcal { D } } e _ { n } \rightarrow 由于独立同分布(iid)所以 \mathop{\mathcal { E }} _ { \mathcal { D } }可拆为\mathop{\mathcal { E }} _ { \mathcal { D_n } }\mathop{\mathcal { E }} _ { \mathcal { (\mathbf{x}_n, y_n) } } \\ &= \frac { 1 } { N } \sum _ { n = 1 } ^ { N } \mathop{\mathcal { E }} _ { \mathcal { D_n } } \underbrace{\mathop{\mathcal { E }} _ { \mathcal { (\mathbf{x}_n, y_n) } } \operatorname { err } \left( g _ { n } ^ { - } \left( \mathbf { x } _ { n } \right) , y _ { n } \right) } \\ & = \frac { 1 } { N } \sum _ { n = 1 } ^ { N } \mathop{\mathcal { E }} _ { \mathcal { D_n} } \quad \quad \quad E _ { \text {out } } \left( g _ { n } ^ { - } \right) \rightarrow 一个固定的g在各式各样的样本下的误差均值 \\ & = \frac { 1 } { N } \sum _ { n = 1 } ^ { N } \overline { E _ { \text {out } } } ( N - 1 ) = \overline { E _ { \text {out } } } ( N - 1 ) \end{aligned} EDEloocv(H,A)=EDN1n=1∑Nen=N1n=1∑NEDen→由于独立同分布(iid)所以ED可拆为EDnE(xn,yn)=N1n=1∑NEDnE(xn,yn)err(gn−(xn),yn)=N1n=1∑NEDnEout (gn−)→一个固定的g在各式各样的样本下的误差均值=N1n=1∑NEout (N−1)=Eout (N−1)
同时当 NNN 相当大时,Eout‾(N−1)≈Eout‾(N)\overline { E _ { \text {out} } } ( N - 1 ) \approx \overline { E _ { \text {out} } } ( N )Eout(N−1)≈Eout(N),所以 Eloocv (H,A)≈Eout(g−)E _ { \text {loocv } } ( \mathcal { H } , \mathcal { A } ) \approx E_{\text{out}}(g^{-})Eloocv (H,A)≈Eout(g−) 又叫 Eout(g)E_{\text{out}}(g)Eout(g) 的无偏估计。
V折交叉验证 (V-Fold Cross Validation)
V折交叉验证(V-fold cross-validation):将 D\mathcal{D}D 随机分为 V 块, 依次拿 V - 1 份进行训练 和 1 份进行测试。
Ecv(H,A)=1V∑v=1VEval(v)(gv−) E _ { \mathrm { cv } } ( \mathcal { H } , \mathcal { A } ) = \frac { 1 } { V } \sum _ { v = 1 } ^ { V } E _ { \mathrm { val } } ^ { ( v ) } \left( g _ { v } ^ { - } \right) Ecv(H,A)=V1v=1∑VEval(v)(gv−)
并依此找最优模型:
m∗=argmin1≤m≤M(Em=Ecv(Hm,Am)) m ^ { * } = \underset { 1 \leq m \leq M } { \operatorname { argmin } } \left( E _ { m } = E _ { \mathrm { cv } } \left( \mathcal { H } _ { m } , \mathcal { A } _ { m } \right) \right) m∗=1≤m≤Margmin(Em=Ecv(Hm,Am))
实践经验(practical rule of thumb)选择:V=5 or 10V = 5 \text{ or } 10V=5 or 10。


















 2989
2989

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











