



PID P、I、D的分别理解、说明:
https://www.cnblogs.com/whylinux/p/10960319.html
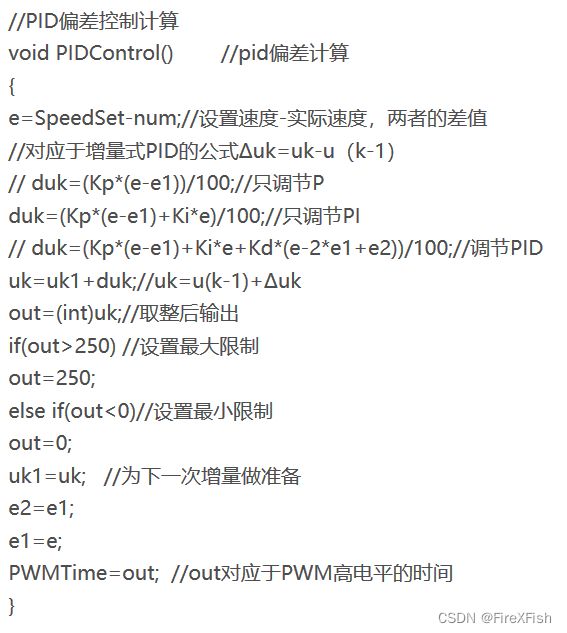
1)位置式PID控制的输出与整个过去的状态有关,用到了误差的累加值;而增量式PID的输出只与当前拍和前两拍的误差有关,因此位置式PID控制的累积误差相对更大;(2)增量式PID控制输出的是控制量增量,并无积分作用,因此该方法适用于执行机构带积分部件的对象,如步进电机等,而位置式PID适用于执行机构不带积分部件的对象,如电液伺服阀。(3)由于增量式PID输出的是控制量增量,如果计算机出现故障,误动作影响较小,而执行机构本身有记忆功能,可仍保持原位,不会严重影响系统的工作,而位置式的输出直接对应对象的输出,因此对系统影响较大。
在控制系统中,这种控制量确定了执行机构的位置,例如在阀门控制中,这种算法的输出对应了阀门的位置(开度)。所以,将这种算法称为“位置算法”。当执行机构需要的不是控制量的绝对值,而是控制量的增量(例如去驱动步进电动机)时,需要用PID的“增量算法”。已看不出是PID的表达式了,也看不出P、I、D作用的直接关系,只表示了各次误差量对控制作用的影响。数字增量式PID算法,只要贮存最近的三个误差采样值e(k)、e(k-1)、e(k-2)就足够了。
PID算法离散化和增量式PID算法原理及Matlab实现
https://blog.youkuaiyun.com/kilotwo/article/details/79829669
位置:
https://blog.youkuaiyun.com/github_39611196/article/details/81163694
增量:
数字pid简介,包括几种先进pid算法
https://wenku.baidu.com/view/595e1443be1e650e52ea995a.html

















 1万+
1万+

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









