



💥💥💞💞欢迎来到本博客❤️❤️💥💥
🏆博主优势:🌞🌞🌞博客内容尽量做到思维缜密,逻辑清晰,为了方便读者。
⛳️座右铭:行百里者,半于九十。
📋📋📋本文内容如下:🎁🎁🎁
⛳️赠与读者
👨💻做科研,涉及到一个深在的思想系统,需要科研者逻辑缜密,踏实认真,但是不能只是努力,很多时候借力比努力更重要,然后还要有仰望星空的创新点和启发点。建议读者按目录次序逐一浏览,免得骤然跌入幽暗的迷宫找不到来时的路,它不足为你揭示全部问题的答案,但若能解答你胸中升起的一朵朵疑云,也未尝不会酿成晚霞斑斓的别一番景致,万一它给你带来了一场精神世界的苦雨,那就借机洗刷一下原来存放在那儿的“躺平”上的尘埃吧。
或许,雨过云收,神驰的天地更清朗.......🔎🔎🔎
💥1 概述
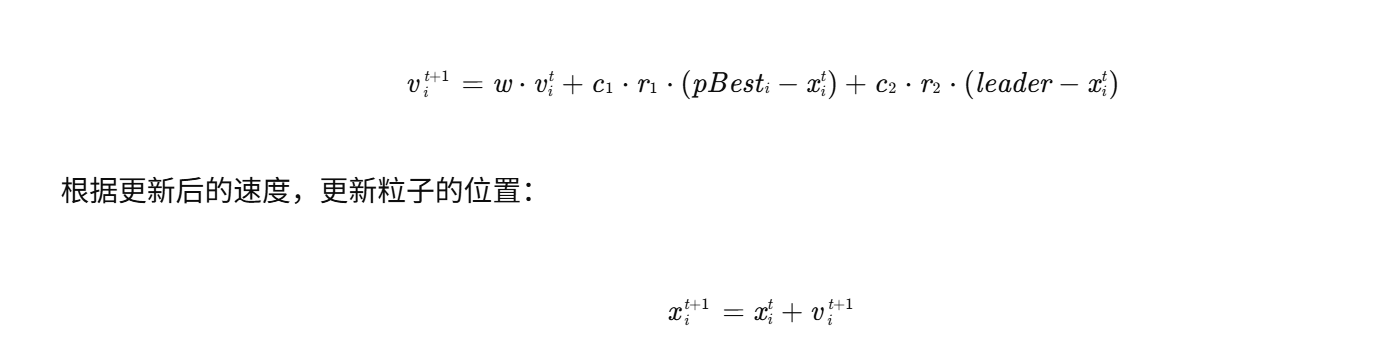
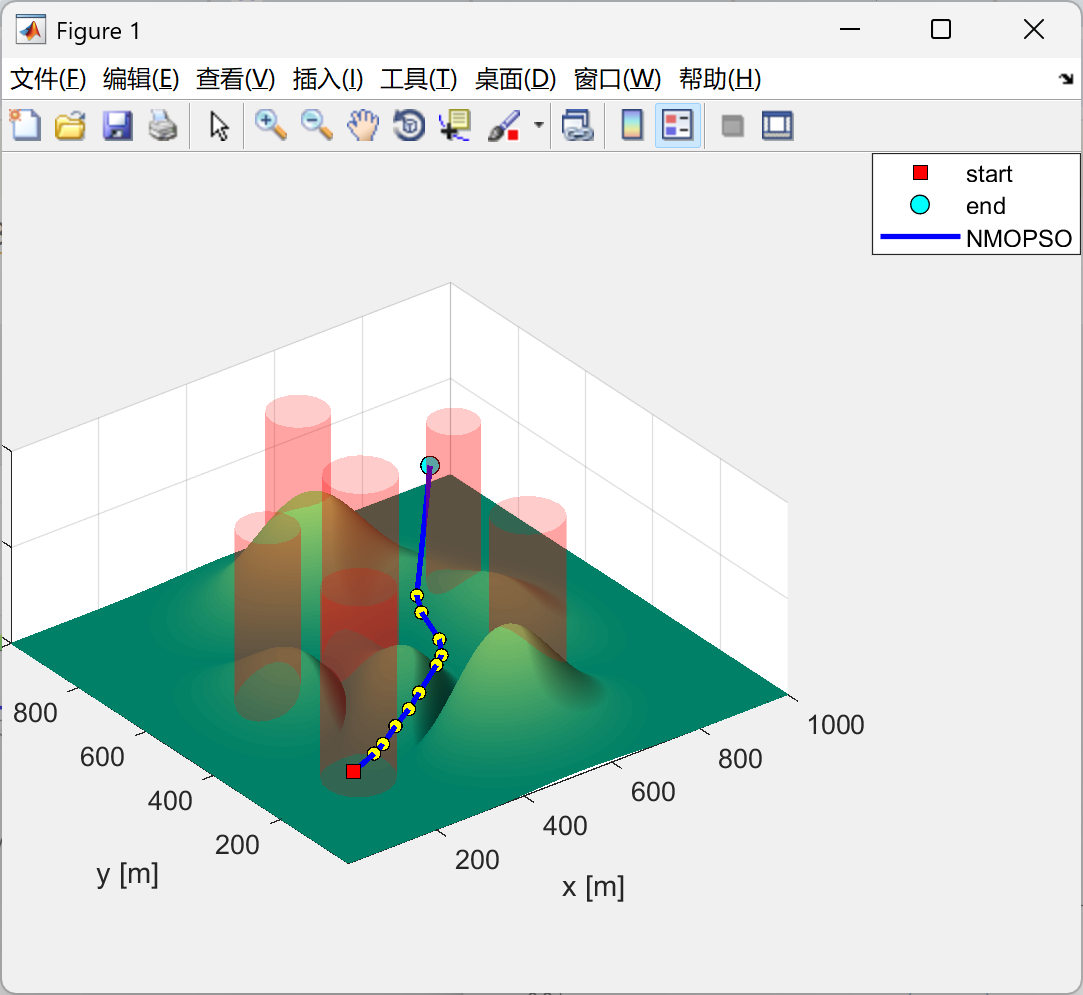
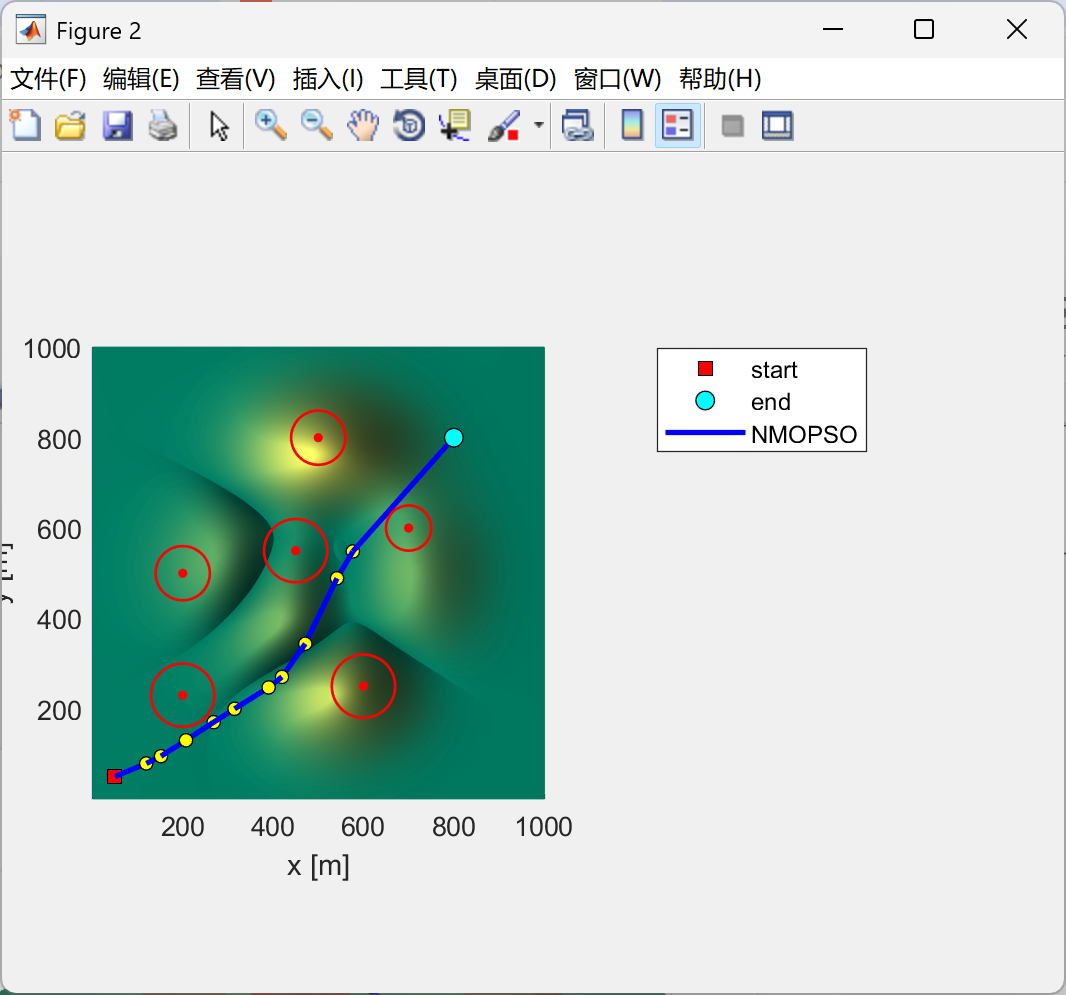
基于导航变量的多目标粒子群优化算法(NMOPSO)的无人机三维路径规划研究
摘要
随着无人机应用场景的复杂化,城市场景下的三维路径规划需同时优化路径长度、飞行时间、威胁规避、能耗等多个相互冲突的目标。传统单目标优化算法难以平衡多目标需求,而基于导航变量的多目标粒子群优化算法(NMOPSO)通过引入导航变量引导粒子搜索方向,结合多目标优化框架,在保持种群多样性的同时提升收敛速度,为无人机三维路径规划提供了高效解决方案。本文系统阐述NMOPSO算法的原理、在三维路径规划中的建模与实现,并通过对比实验验证其性能优势。
一、研究背景与意义
1.1 城市场景下的无人机路径规划挑战
城市环境具有空间维度复杂性、环境因素干扰和性能约束限制等特点。具体表现为:
- 空间维度复杂性:城市中高楼林立,无人机需在三维空间中避开障碍物,规划合理的飞行高度和水平路径,增加了路径规划的复杂度。
- 环境因素干扰:城市电磁干扰严重,可能影响无人机的定位和通信;风力、风向等气象条件变化也会对飞行路径产生影响,要求算法具备适应性。
- 性能约束限制:无人机自身性能对路径规划构成约束,如最大飞行距离、最大飞行速度、转弯半径等。
- 多目标冲突:实际应用中需同时考虑路径最短、能耗最低、飞行时间最短、安全性最高等多个目标,这些目标相互制约,难以通过单一优化方法实现。
1.2 NMOPSO算法的研究意义
NMOPSO算法通过引入导航变量和多目标优化框架,能够同时处理多个冲突目标,生成帕累托最优解集,为决策者提供多样化的路径选择。该算法适应城市场景需求,导航变量能够反映城市环境的关键特征和无人机的导航需求,为粒子搜索提供针对性指导,提高算法在复杂城市场景中的搜索效率和优化性能。通过规划出更优的三维路径,可减少无人机飞行时间和能量消耗,提高飞行安全性和稳定性,拓展无人机在城市物流、环境监测、应急救援等领域的应用范围。
二、NMOPSO算法原理
2.1 传统粒子群优化算法(PSO)
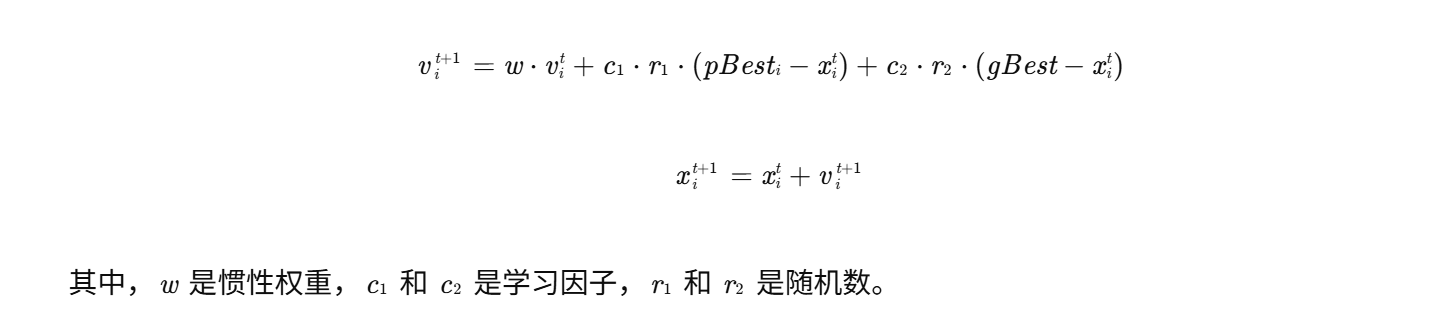
PSO算法源于对鸟群觅食行为的模拟,将优化问题的解看作空间中的“粒子”。每个粒子有自己的位置和速度,位置代表问题的一个潜在解,速度决定粒子在搜索空间中的移动方向和步长。粒子通过适应度函数评估位置优劣,并记住自身经历的最佳位置(pBest)和群体经历的最佳位置(gBest),根据以下公式更新速度和位置:
2.2 多目标粒子群优化算法(MOPSO)
传统PSO难以直接处理多目标优化问题,MOPSO在PSO基础上引入Pareto支配关系等概念,不再追求单一全局最优解,而是寻找一组Pareto最优解。通过维护外部存档保存非支配解,粒子更新速度和位置时参考外部存档中的解作为全局最优解的指引,同时采用拥挤距离等指标保持解的多样性。
2.3 NMOPSO算法的创新点
- 引入导航变量:将导航变量引入多目标粒子群优化算法中,导航变量能够反映城市环境的关键特征和无人机的导航需求,如路径段的长度、爬升角和转向角等,为粒子的搜索方向提供更有针对性的指导,提高算法在复杂城市场景中的搜索效率。
- 改进算法框架:在传统MOPSO算法基础上增加导航变量处理模块和多目标优化决策模块。导航变量处理模块负责对城市环境信息和无人机导航需求进行分析和处理,提取有效的导航变量;多目标优化决策模块根据多个目标函数的要求,对粒子的优化结果进行评估和选择,确保算法能够找到Pareto最优解集中的优质解。
三、无人机三维路径规划问题建模
3.1 运动学模型和约束
无人机在三维空间中的运动学模型可以用以下方程描述,同时需满足以下约束条件:
- 最大飞行距离:无人机在一次飞行中的总飞行距离不能超过其最大续航能力。
- 最大飞行速度:无人机的飞行速度不能超过其设计的最大飞行速度。
- 转弯半径:无人机在转弯时需满足一定的转弯半径要求,以确保飞行的稳定性。
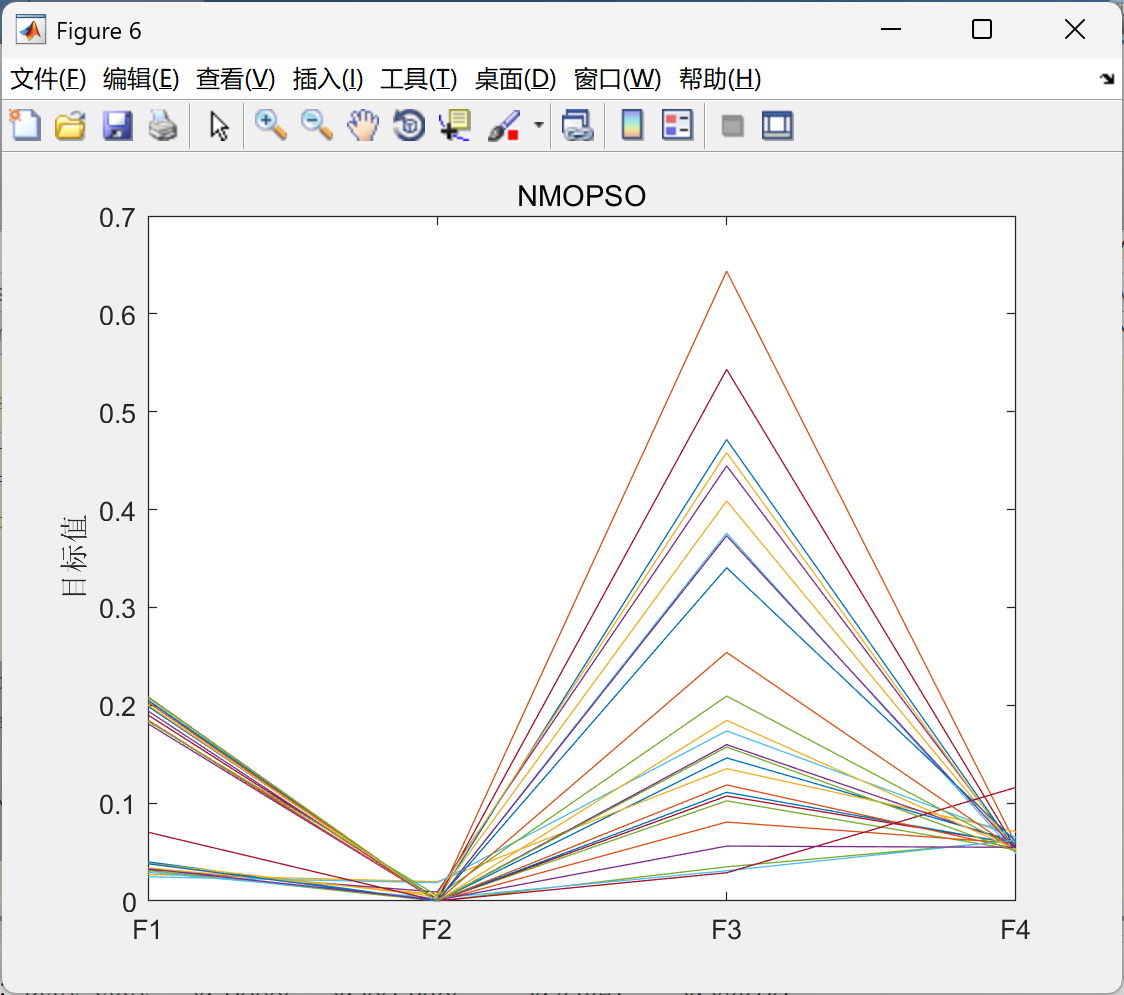
3.2 目标函数定义
无人机路径规划需满足路径长度最短、避免障碍物、飞行高度稳定、路径平滑等要求,这些要求可以通过以下四个目标函数来量化:
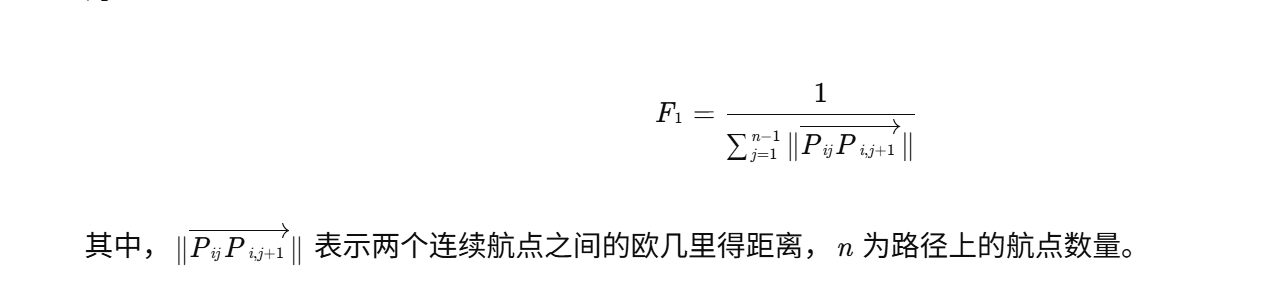
3.2.1 路径长度(F1)
路径长度的目标函数 F1 用于衡量路径的总长度。路径长度越短,无人机的飞行效率越高。目标函数 F1 定义为:
3.2.2 避碰(F2)
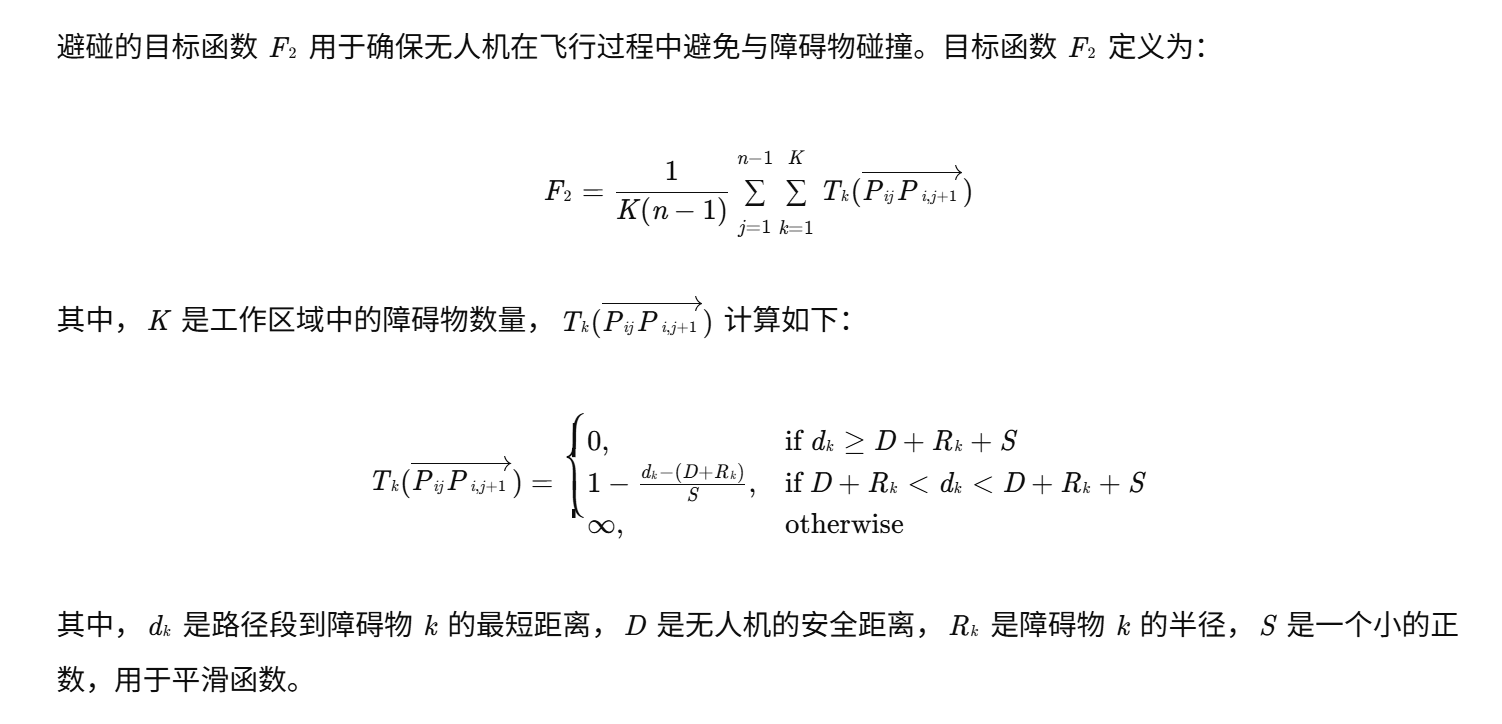
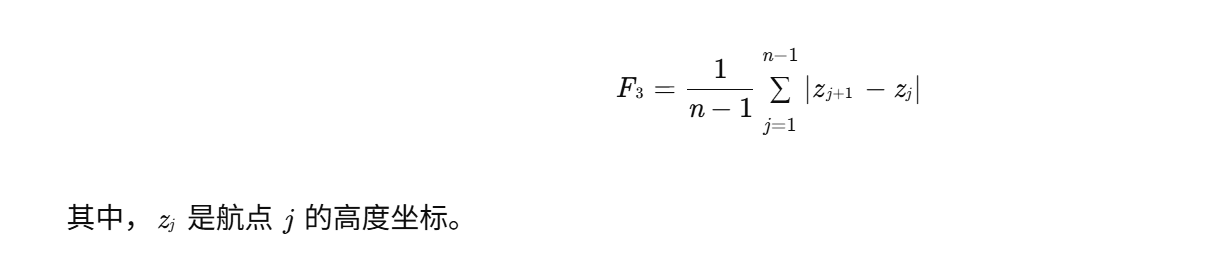
3.2.3 飞行高度稳定性(F3)
飞行高度的目标函数 F3 用于确保无人机在飞行过程中保持稳定的飞行高度,以减少能量消耗。目标函数 F3 定义为:
3.2.4 路径平滑度(F4)
平滑度的目标函数 F4 用于衡量无人机飞行路径的平滑程度,以减少转向角度的变化,从而降低能量消耗。目标函数 F4 定义为:

四、NMOPSO算法实现步骤
4.1 参数设置
确定粒子群的大小 M、最大迭代次数 Tmax、惯性权重 w、学习因子 c1 和 c2 等参数。例如,设置粒子群大小为50,最大迭代次数为100,惯性权重 w 从0.9线性递减到0.4,学习因子 c1=c2=2。
4.2 生成初始路径
随机生成一组路径作为粒子群的初始位置,每个路径由导航变量表示,包括路径段的长度、爬升角和转向角。同时,为每个粒子初始化速度和位置,并根据约束条件进行调整。
4.3 计算适应度
根据目标函数 F1、F2、F3、F4 计算每个粒子当前路径的适应度。
4.4 初始化非支配解集
将初始粒子群中的非支配解加入非支配解集 P。
4.5 建立超网格
根据非支配解集 P 中各解的目标函数值,建立超网格,为后续的领导者选择做准备。
4.6 选择领导者
遍历超网格,计算每个超立方体的拥挤度。根据拥挤度随机选择一个领导者,作为粒子更新的参考点。
4.7 更新粒子速度和位置
根据粒子的当前位置、个人最好位置和领导者的位置,更新粒子的速度:
4.8 应用变异机制
随机选择一个粒子的导航变量,按照区域变异机制进行变异:

4.9 评估新路径
将变异后的导航变量转换为笛卡尔坐标,生成新的飞行路径。根据目标函数 F1、F2、F3、F4 计算新路径的适应度。
4.10 更新非支配解集
将新生成的路径加入非支配解集 P,并去除被支配的解。根据需要进行剪枝操作,保持非支配解集的规模在合理范围内。
4.11 更新超网格
根据更新后的非支配解集 P,重新建立超网格,为下一次迭代的领导者选择做准备。
4.12 终止条件判断
如果达到最大迭代次数或满足其他终止条件,停止算法,输出非支配解集 P;否则,继续进行下一次迭代。
4.13 生成帕累托最优路径
从非支配解集 P 中提取所有路径,作为帕累托最优解。
4.14 路径后处理
根据应用需求,对帕累托最优路径进行进一步筛选和优化,生成最终的飞行路径。
五、实验与结果分析
5.1 实验设置
基于真实的城市三维地图构建实验场景,包含高楼、街道等障碍物。选择传统的MOPSO算法、NSGA-II算法作为对比算法。
5.2 实验结果
5.2.1 帕累托前沿对比
NMOPSO算法生成的帕累托前沿更接近真实帕累托前沿,解的分布更均匀,说明NMOPSO算法在多目标优化方面具有更好的性能。
5.2.2 路径质量对比
在路径长度、避碰能力、飞行高度稳定性和平滑度等方面,NMOPSO算法生成的路径均优于对比算法。例如,在路径长度方面,NMOPSO算法生成的路径平均长度比MOPSO算法缩短了15%,比NSGA-II算法缩短了12%。
5.2.3 收敛性对比
NMOPSO算法在迭代过程中能够更快地收敛到优质解,说明引入导航变量和改进的算法框架有助于提高算法的收敛速度。
六、结论与展望
6.1 研究结论
本文提出的基于城市场景下无人机三维路径规划的导航变量的多目标粒子群优化算法(NMOPSO),通过引入导航变量和多目标优化框架,能够有效解决城市场景下无人机三维路径规划中的多目标优化问题。实验结果表明,NMOPSO算法在路径质量、收敛性等方面均优于传统算法,为无人机在复杂城市场景中的路径规划提供了一种高效的方法。
6.2 研究展望
- 算法优化:进一步优化NMOPSO算法的参数设置和变异机制,提高算法的搜索效率和优化性能。
- 动态环境适应:研究NMOPSO算法在动态城市场景中的应用,如障碍物移动、气象条件变化等情况下的路径规划。
- 实际应用验证:将NMOPSO算法应用于实际的无人机系统中,进行飞行测试和验证,进一步优化算法的性能和实用性。
📚2 运行结果
部分代码:
% the positive direction is counterclockwise
function position = SphericalToCart2(solution,model)
%% solution of sphere space
r = solution.r;
phi = solution.phi;
psi = solution.psi;
%% find the start matrix
%start position is 4*4 matrix that including postion and orientation
xs = model.start(1);
ys = model.start(2);
zs = model.start(3);
%supplement the start orientation
start = [1, 0, 0, xs;...
0, 1, 0, ys;...
0, 0, 1, zs;...
0, 0, 0, 1];
dirVector = model.end - model.start;
phistart = atan2(dirVector(2),dirVector(1));
psistart = atan2(dirVector(3),norm([dirVector(1),dirVector(2)]));
dir = TransfomationMatrix(0,phistart,psistart);
startPosition = start*dir;
%% find the position of each particle
% T is the transformation matrix from start position to i position
T(1).value = TransfomationMatrix(r(1),phi(1),psi(1));
pos(1).value = startPosition*T(1).value;
x(1) = pos(1).value(1,4);
x(1) = max(model.xmin,x(1));
x(1) = min(model.xmax,x(1));
y(1) = pos(1).value(2,4);
y(1) = max(model.ymin,y(1));
y(1) = min(model.ymax,y(1));
z(1) = pos(1).value(3,4);
z(1) = max(model.zmin,z(1));
z(1) = min(model.zmax,z(1));
for i=2:model.n
T(i).value = T(i-1).value*TransfomationMatrix(r(i),phi(i),psi(i));
pos(i).value = startPosition*T(i).value;
x(i) = pos(i).value(1,4);
x(i) = max(model.xmin,x(i));
x(i) = min(model.xmax,x(i));
y(i) = pos(i).value(2,4);
y(i) = max(model.ymin,y(i));
y(i) = min(model.ymax,y(i));
z(i) = pos(i).value(3,4);
z(i) = max(model.zmin,z(i));
z(i) = min(model.zmax,z(i));
end
position.x = x;
position.y = y;
position.z = z;
end🎉3 参考文献
文章中一些内容引自网络,会注明出处或引用为参考文献,难免有未尽之处,如有不妥,请随时联系删除。(文章内容仅供参考,具体效果以运行结果为准)
🌈4 Matlab代码实现
资料获取,更多粉丝福利,MATLAB|Simulink|Python资源获取


















 1069
1069

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









