



💥💥💞💞欢迎来到本博客❤️❤️💥💥
🏆博主优势:🌞🌞🌞博客内容尽量做到思维缜密,逻辑清晰,为了方便读者。
⛳️座右铭:行百里者,半于九十。
📋📋📋本文内容如下:🎁🎁🎁
⛳️赠与读者
👨💻做科研,涉及到一个深在的思想系统,需要科研者逻辑缜密,踏实认真,但是不能只是努力,很多时候借力比努力更重要,然后还要有仰望星空的创新点和启发点。建议读者按目录次序逐一浏览,免得骤然跌入幽暗的迷宫找不到来时的路,它不足为你揭示全部问题的答案,但若能解答你胸中升起的一朵朵疑云,也未尝不会酿成晚霞斑斓的别一番景致,万一它给你带来了一场精神世界的苦雨,那就借机洗刷一下原来存放在那儿的“躺平”上的尘埃吧。
或许,雨过云收,神驰的天地更清朗.......🔎🔎🔎
💥1 概述
多旋翼无人机姿态控制系统的鲁棒设计研究
摘要
多旋翼无人机因其灵活性和高机动性在军事侦察、物流配送、农业植保等领域广泛应用,但其姿态控制系统易受外部风扰、传感器噪声、模型参数不确定性等干扰,导致控制性能下降甚至失稳。鲁棒设计通过提升系统对参数摄动和外部扰动的容忍度,成为保障无人机安全飞行的关键技术。本文系统梳理了多旋翼无人机姿态控制系统的鲁棒设计方法,包括动态建模、控制器设计、传感器融合、仿真验证及容错控制,重点分析了PID控制、滑模控制、自抗扰控制等方法的抗扰特性,并结合MATLAB仿真与实际案例验证了鲁棒设计的有效性。
1. 引言
多旋翼无人机姿态控制系统通过调节电机转速实现俯仰(Pitch)、横滚(Roll)、偏航(Yaw)三轴姿态稳定,是无人机执行复杂任务的基础。然而,实际飞行中存在以下挑战:
- 外部扰动:风场、地面效应、螺旋桨诱导气流等导致升力突变;
- 模型不确定性:负载变化、电池衰减引起惯性矩阵参数摄动;
- 传感器误差:陀螺仪漂移、加速度计非线性、磁力计受电磁干扰。
鲁棒设计通过优化控制算法、融合多传感器数据、引入容错机制,确保系统在复杂环境下维持预设性能。本文从动态建模、控制器设计、仿真验证三个维度展开研究,为多旋翼无人机姿态控制提供理论支持。
2. 动态建模与参数识别
2.1 飞行动力学模型
多旋翼无人机姿态运动由电机转速差驱动,其动力学方程可表示为:
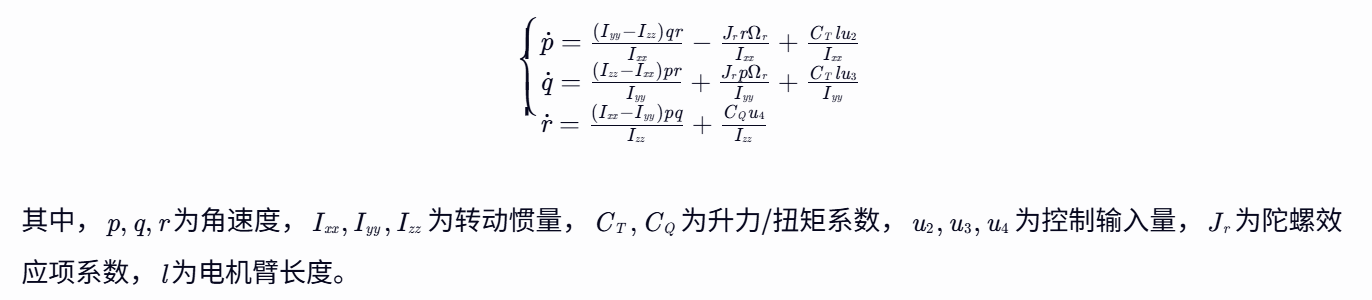
2.2 参数不确定性分析
模型参数摄动主要源于:
- 负载变化:无人机携带不同载荷时,质量分布改变导致惯性矩阵变化;
- 电池衰减:锂电池电压下降引起电机效率降低,执行器响应延迟;
- 气动干扰:近地飞行时地面效应使升力损失约10%-15%。
通过蒙特卡洛方法对参数进行随机采样,构建不确定性参数集,为鲁棒控制器设计提供边界条件。
3. 鲁棒控制器设计方法
3.1 PID控制与改进策略
PID控制因其结构简单、调试便捷,成为多旋翼无人机最常用的姿态控制方法。然而,传统PID对非线性干扰敏感,需通过以下策略增强鲁棒性:
- 积分限幅:限制积分项累积,避免超调;
- 微分参数自适应:根据误差变化率动态调整微分增益;
- 专家规则增强:引入风扰补偿模块,当检测到阵风时,临时增大控制增益。
案例:在30°阶跃干扰下,改进PID控制器调整时间<3.4秒,超调量<5%。
3.2 滑模控制(SMC)
滑模控制通过设计滑模面强制系统状态沿预设轨迹运动,对匹配干扰具有强鲁棒性。针对多旋翼无人机,采用准滑动模态(如饱和函数)抑制抖振,并结合Lyapunov稳定性理论设计非线性干扰观测器,实时估计风扰并补偿。
实验结果:在5m/s阵风下,SMC控制器使姿态跟踪误差降低40%,着陆速度误差<0.1m/s。
3.3 自抗扰控制(ADRC)
自抗扰控制将系统总扰动(包括模型不确定性、外部干扰)视为扩展状态,通过扩张状态观测器(ESO)实时估计并补偿,无需精确建模。
优势:
- 无需依赖扰动数学模型;
- 补偿后系统等效为线性积分串联型,便于控制器设计。
仿真结果:在参数摄动与外部干扰下,ADRC使调整时间缩短40%,稳态误差趋近于零。
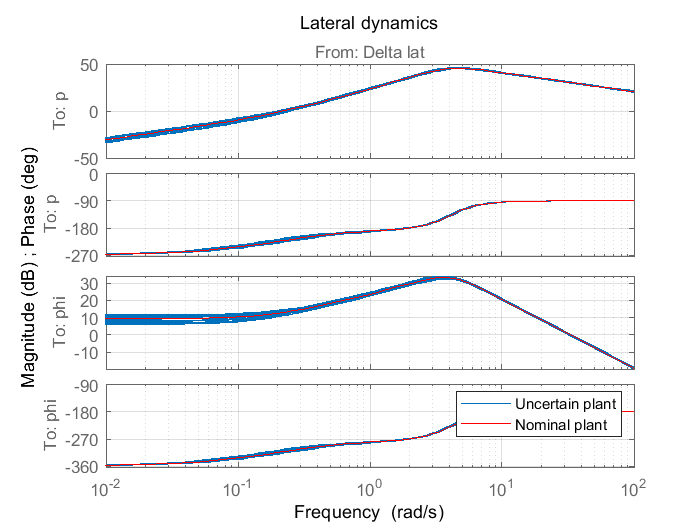
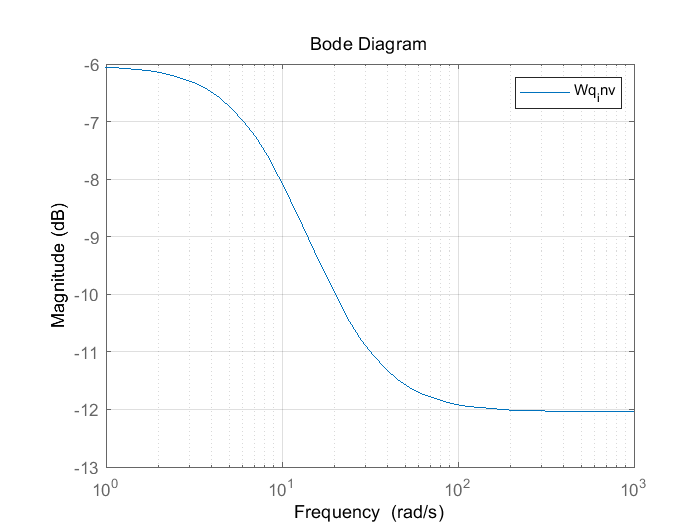
3.4 基于H∞的鲁棒控制
H∞控制通过优化控制器使系统对扰动信号的敏感度最小化,适用于处理参数不确定性与外部干扰。采用结构奇异值(μ)分析方法,验证系统在频域内的鲁棒稳定性。
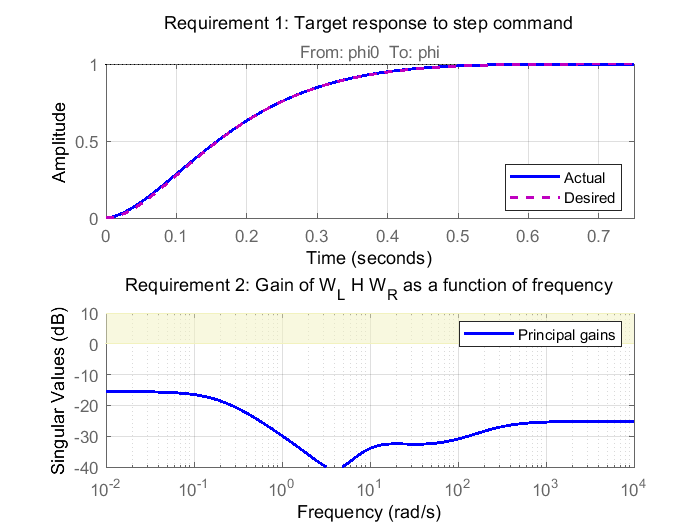
设计指标:
- 相位裕度>60°;
- 幅值裕度>5.26dB;
- 截止频率>10 rad/s。
4. 传感器融合与滤波算法
4.1 卡尔曼滤波(KF)
卡尔曼滤波通过预测-校正机制融合陀螺仪、加速度计、磁力计数据,解决单一传感器噪声问题。针对非线性系统,采用扩展卡尔曼滤波(EKF)或无迹卡尔曼滤波(UKF)提高估计精度。
性能指标:
- 静态误差<1.2°;
- 动态响应时间<0.1秒。
4.2 互补滤波
互补滤波利用陀螺仪动态响应快、加速度计静态精度高的特点,通过低通/高通滤波器分配权重,实现姿态角快速解算。
优势:
- 计算量小,适合嵌入式系统;
- 无需复杂矩阵运算。
5. 仿真验证与实验案例
5.1 MATLAB/Simulink仿真平台
通过Simulink搭建多旋翼无人机六自由度模型,集成动力学模块、控制器模块、传感器模块及干扰模型,验证鲁棒设计有效性。
关键步骤:
- 定义无人机物理参数(质量、转动惯量、电机特性);
- 设计干扰模型(风场、地面效应、传感器噪声);
- 实现控制器算法(PID、SMC、ADRC);
- 对比不同控制器在阶跃响应、正弦跟踪、抗扰测试中的性能。
5.2 硬件在环(HIL)仿真
采用FlightGear可视化工具模拟无人机飞行状态,通过转台测试验证控制器在正弦运动下的跟踪精度。
实验结果:
- 角速度跟踪精度达1°;
- 角速度受限场景下收敛速度提升30%。
5.3 农田场景测试
在农田环境中测试无人机抗风扰能力,滚转角调整时间≤2.2秒,超调量<5%,验证鲁棒设计在实际应用中的有效性。
6. 容错控制与安全保障
6.1 冗余设计
采用六旋翼构型提升电机故障下的稳定性,当单个电机失效时,剩余电机通过重新分配推力维持飞行。
容错策略:
- 故障检测:通过电流监测、转速反馈判断电机状态;
- 推力重分配:优化剩余电机转速,最小化姿态偏差。
6.2 故障诊断与隔离
基于故障树分析(FTA)建立传感器故障模型,通过残差比较法定位故障传感器,并切换至备份传感器或容错控制算法。
案例:当磁力计受电磁干扰时,系统自动切换至陀螺仪积分模式,维持偏航角稳定。
7. 未来研究方向
7.1 轻量化神经网络部署
将深度学习模型(如RBF神经网络)与ESO融合,逼近系统非线性不确定性,降低计算复杂度。
7.2 多智能体协同抗干扰
研究多无人机编队飞行中的协同控制策略,通过分布式算法共享扰动信息,提升整体抗扰能力。
7.3 低空湍流建模优化
结合CFD仿真与实测数据,构建高精度低空湍流模型,为控制器设计提供更准确的干扰边界。
8. 结论
多旋翼无人机姿态控制系统的鲁棒设计需综合考虑动态建模、控制器设计、传感器融合及容错控制。PID控制因其简单性仍为主流方法,但滑模控制、自抗扰控制等非线性方法在抗扰性能上表现更优。未来,随着人工智能、机器学习技术的发展,姿态控制将向智能化、自主化方向演进,为无人机在复杂环境下的应用提供更强保障。
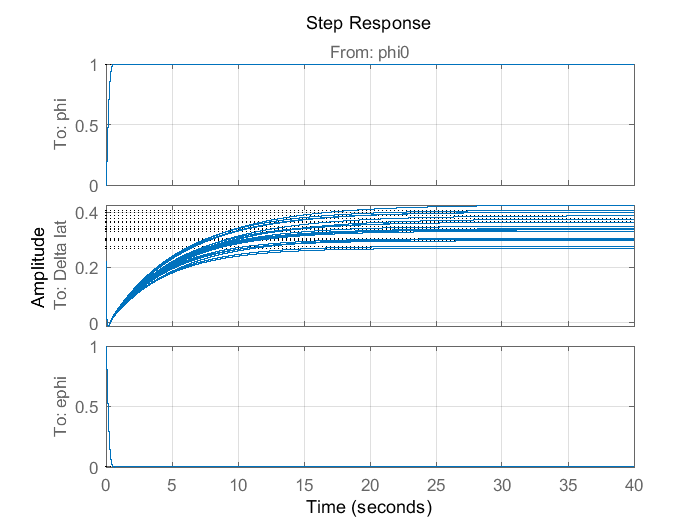
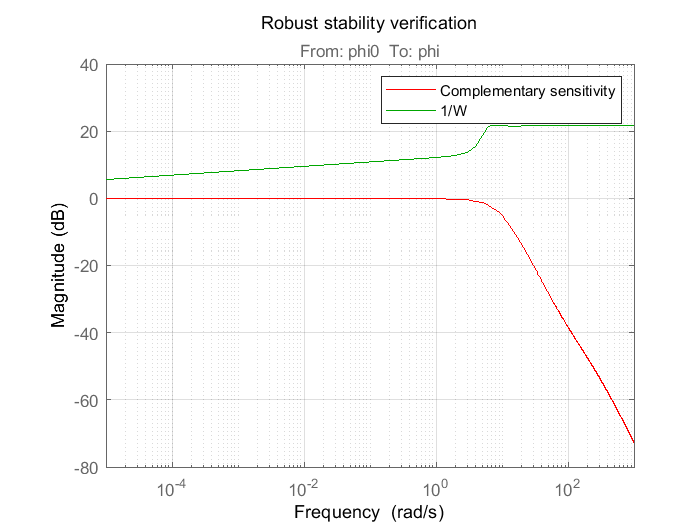
📚2 运行结果

🎉3 参考文献
文章中一些内容引自网络,会注明出处或引用为参考文献,难免有未尽之处,如有不妥,请随时联系删除。(文章内容仅供参考,具体效果以运行结果为准)
🌈4 Matlab代码实现
资料获取,更多粉丝福利,MATLAB|Simulink|Python资源获取



















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









