



💥💥💞💞欢迎来到本博客❤️❤️💥💥
🏆博主优势:🌞🌞🌞博客内容尽量做到思维缜密,逻辑清晰,为了方便读者。
⛳️座右铭:行百里者,半于九十。
📋📋📋本文目录如下:🎁🎁🎁
目录
💥1 概述
使用自抗扰控制(ADRC)技术来控制永磁同步电机是一种常见的方法。在进行仿真模型设计时,通常需要考虑永磁同步电机的动态方程、控制策略以及系统的稳定性等因素。
1. 首先,编写永磁同步电机的动态方程。这可以是基于电机的物理特性和转子、定子之间的电磁耦合关系建立的微分方程组。
2. 接下来,设计ADRC控制器,包括观测器和控制器。ADRC控制器通常包括状态观测器、扰动观测器和控制器三部分,用于实现对系统状态和扰动的估计和补偿。
3. 将永磁同步电机的动态方程和ADRC控制器整合在一起,建立闭环控制系统的仿真模型。
4. 运行仿真,并根据仿真结果评估系统的性能,包括速度响应、转矩跟踪精度和系统稳定性等指标。
永磁同步电机的调速系统是多变量、强耦合的非线性系统,这种系统在实际控制中会面临诸多挑战。系统控制量之间的耦合性使得单独控制某一变量时会对其他变量产生影响,增加了系统控制的复杂度。为了有效应对这一问题,自抗扰控制技术被引入到永磁同步电机调速系统中。
自抗扰控制技术将系统的耦合项视为单一的扰动进行处理,从而在一定程度上解决了系统的耦合问题。通过这种方法,系统的控制变量数目得到减少,简化了控制系统的设计与实现。实验和仿真结果表明,自抗扰控制技术在永磁同步电机调速系统中表现出良好的动态和静态性能,为系统稳定性和性能提升提供了有效的解决方案。
基于自抗扰控制(ADRC)的永磁同步电机仿真模型研究
一、研究背景与意义
永磁同步电机(PMSM)凭借其高效率、高功率密度和良好的调速性能,在工业、汽车、航空航天等领域得到了广泛应用。然而,PMSM是一个多变量、强耦合的非线性系统,其控制过程中存在参数变化、外部扰动等不确定性因素,传统控制方法如PID控制难以满足高精度、强鲁棒性的控制需求。自抗扰控制(ADRC)作为一种先进的控制策略,将系统内部参数变化、外部扰动等不确定性因素统一视为“总和扰动”,并通过扩张状态观测器(ESO)实时估计和补偿,能够有效提高系统的抗干扰能力和控制精度,为PMSM的高性能控制提供了新的解决方案。
二、自抗扰控制(ADRC)原理
2.1 ADRC基本结构
ADRC主要由跟踪微分器(TD)、扩张状态观测器(ESO)和非线性状态误差反馈(NLSEF)三部分组成。
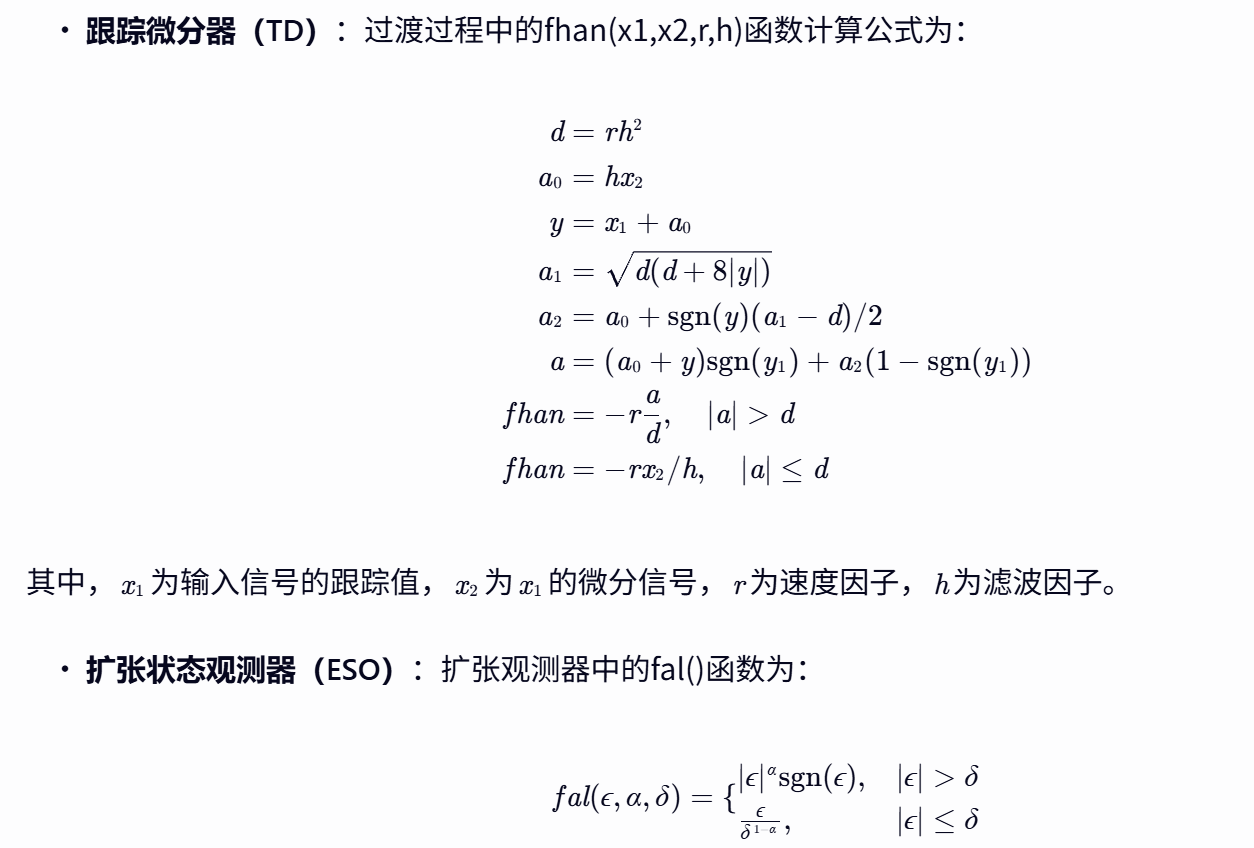
- 跟踪微分器(TD):用于安排合适的过渡过程,抑制输入信号突变引起的振荡,并提供微分信号。其作用是使系统能够快速且平稳地跟踪输入信号,避免因输入信号的突变导致系统出现超调或振荡。
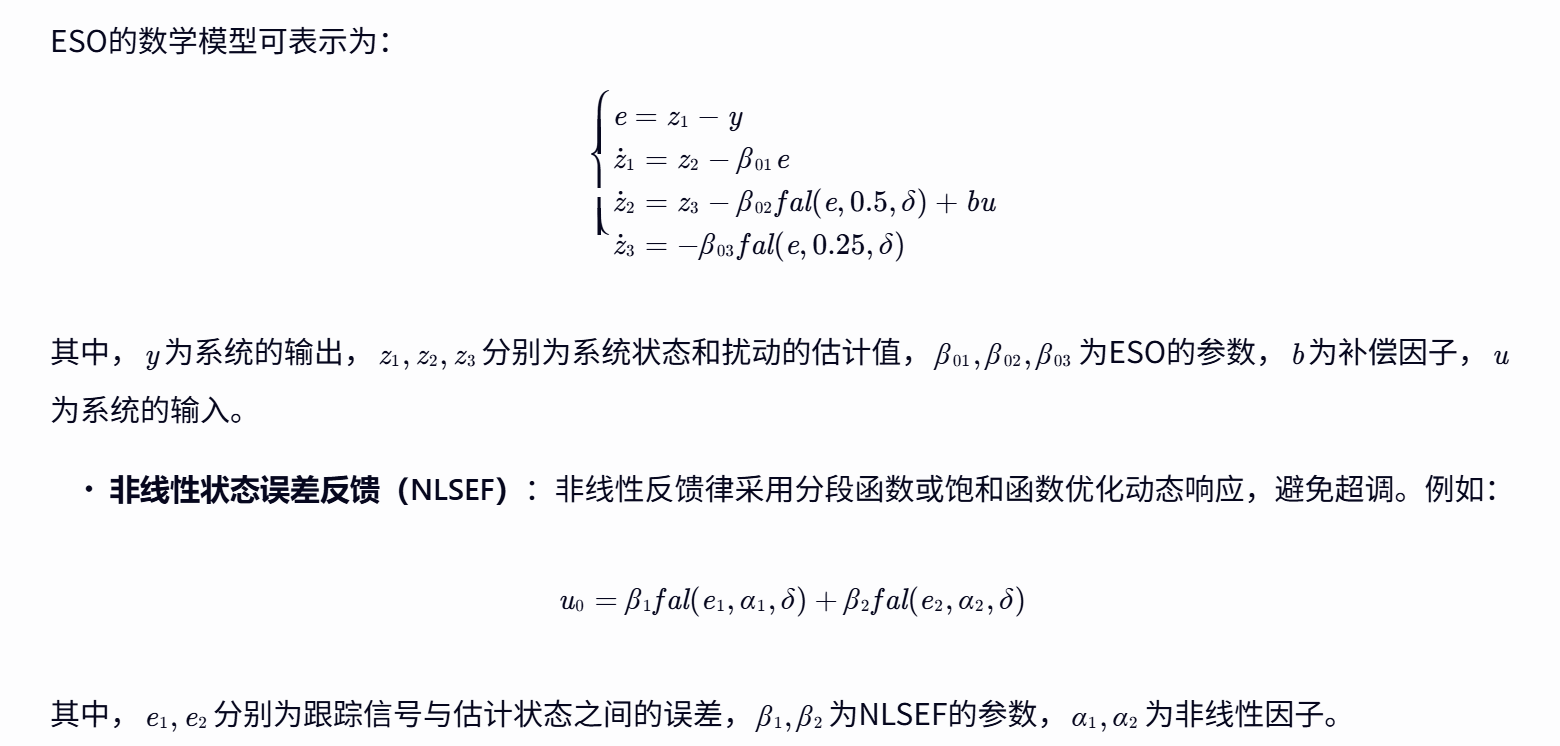
- 扩张状态观测器(ESO):将扰动扩展为系统的额外状态变量,通过输入输出数据实时估计系统状态和总和扰动。ESO是ADRC的核心部分,它不需要精确知道系统的数学模型,只需通过系统的输入输出信息就能估计出系统的状态和扰动,从而实现对扰动的补偿。
- 非线性状态误差反馈(NLSEF):基于TD和ESO的输出设计非线性控制律,将跟踪信号与估计状态之间的误差进行非线性组合得到初级控制量,然后同总扰动的补偿量一起生成最终的控制信号。NLSEF采用非线性函数,能够提高系统的动态响应速度和抗干扰能力。
2.2 ADRC数学模型
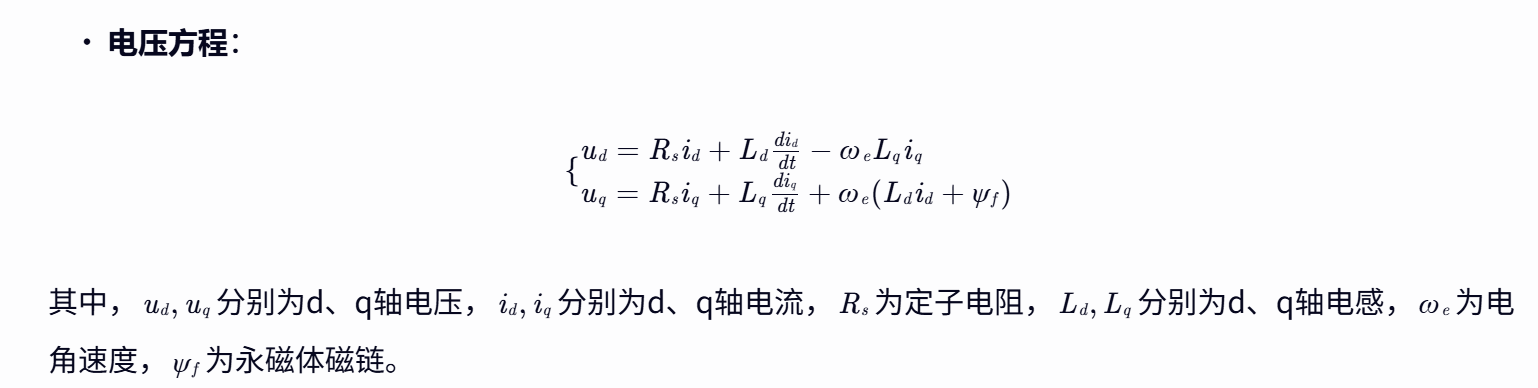
三、永磁同步电机(PMSM)数学模型
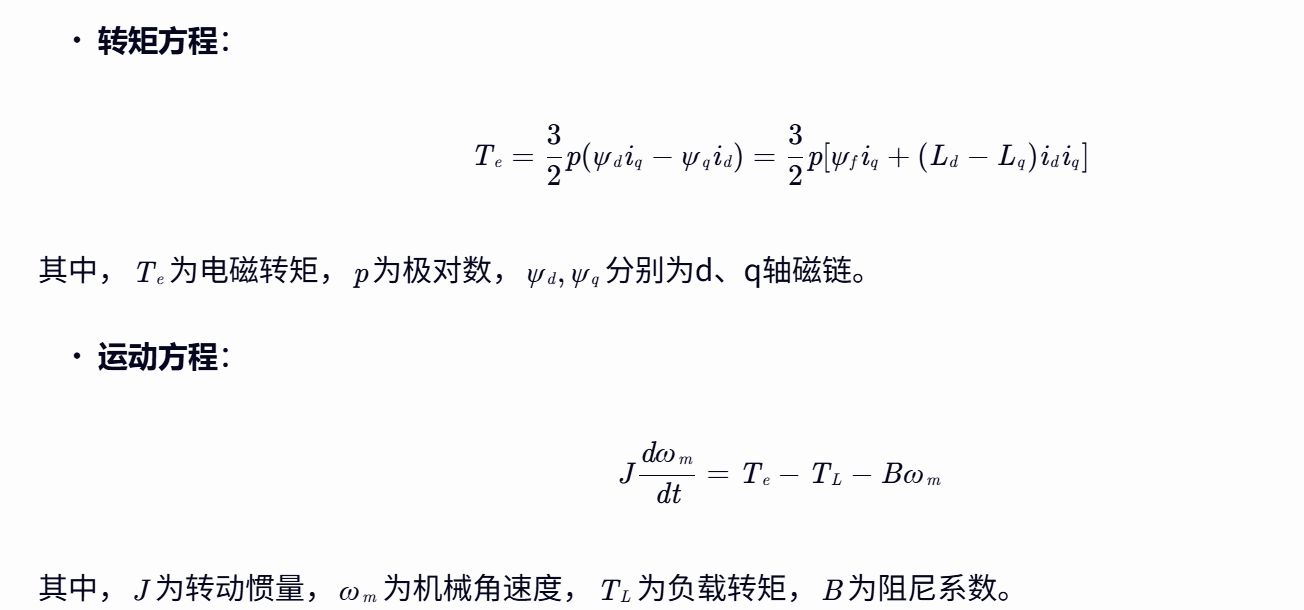
PMSM在矢量控制中常采用d - q旋转坐标系模型,假设忽略磁滞、涡流损耗和阻尼绕组,其动态方程如下:
四、基于ADRC的PMSM控制策略设计
4.1 速度环ADRC设计
将PMSM的速度环采用ADRC控制,替代传统PI控制器。速度环ADRC将负载扰动和参数变化视为总和扰动,通过ESO实时估计和补偿。
-
TD设计:根据给定的速度参考信号,设计TD生成过渡过程信号和微分信号,避免速度参考信号突变引起的系统振荡。
-
ESO设计:将速度环的系统状态和扰动进行扩张观测。设速度环的系统状态方程为:
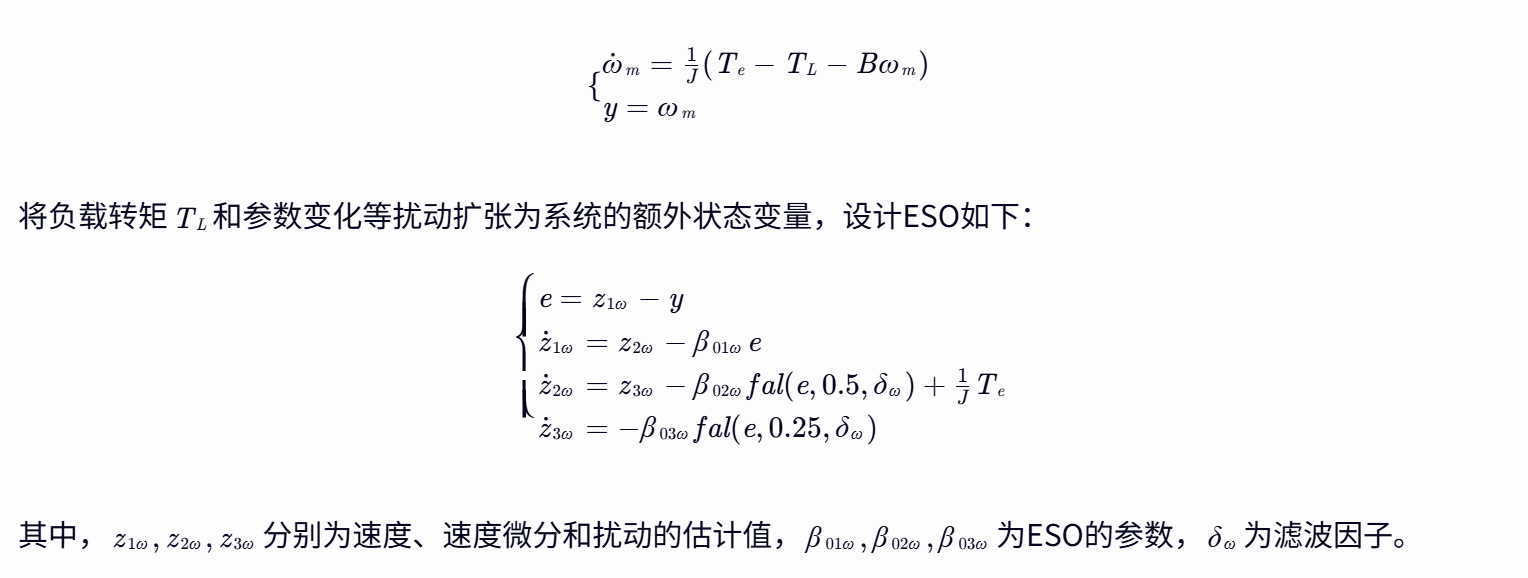
-
NLSEF设计:根据TD输出的跟踪信号和微分信号以及ESO输出的状态估计值,设计NLSEF生成速度环的控制信号。

4.2 电流环设计
电流环可采用PI或ADRC控制,实现d - q轴电流解耦。若采用PI控制,其控制律为:

五、仿真建模与实现
5.1 仿真工具选择
采用MATLAB/Simulink进行仿真建模。MATLAB/Simulink具有强大的数值计算能力和丰富的模块库,能够方便地实现PMSM的数学模型、ADRC控制器以及信号处理和显示模块的搭建。
5.2 仿真模型搭建
- PMSM电机模块:利用Simulink中的PMSM模块,根据电机的参数设置其电气特性和机械特性。
- ADRC控制器模块:根据上述设计的速度环ADRC和电流环(若采用ADRC)的数学模型,使用Matlab function编写TD、ESO和NLSEF等子模块,并将其封装为独立的ADRC控制器模块。
- 信号处理和显示模块:搭建转速波形、电流波形等信号的显示模块,用于实时观察系统的运行状态和性能指标。
- 闭环控制系统搭建:将PMSM电机模块、ADRC控制器模块、信号处理和显示模块等连接起来,构建完整的闭环控制系统仿真模型。
5.3 仿真参数设置
- 电机参数:根据实际PMSM的参数进行设置,如定子电阻Rs、d - q轴电感Ld,Lq、永磁体磁链ψf、转动惯量J、极对数p等。
- ADRC参数:根据带宽法或优化算法(如粒子群算法)调节TD、ESO和NLSEF的增益。例如,ESO带宽ωo设为控制器带宽ωc的3 - 5倍。
- 仿真条件:设置仿真时间、步长等仿真条件,并在仿真过程中加入负载扰动,以测试系统的抗干扰能力。
六、仿真结果与分析
6.1 动态性能分析
- 上升时间:系统从零初始状态到达目标转速所需的时间,一般要求上升时间小于0.05s。
- 调节时间:系统从受到扰动开始到进入稳态误差带(通常为±2%)所需的时间,一般要求调节时间小于0.1s。
- 超调量:系统响应的最大偏差与目标值的百分比,一般要求超调量小于2%。
通过仿真实验,观察PMSM电机在ADRC控制下的转速波形,分析其上升时间、调节时间和超调量等动态性能指标。与传统PID控制相比,ADRC控制能够显著缩短上升时间和调节时间,减小超调量,提高系统的动态响应速度和稳定性。
6.2 抗扰性能分析
在仿真过程中加入负载扰动(如突加负载),观察PMSM电机的转速波动和恢复时间。抗扰性能指标包括:
- 转速波动幅度:负载突变时转速的最大偏差与目标转速的百分比,一般要求转速波动幅度小于1%。
- 恢复时间:系统从受到负载扰动开始到恢复到稳态误差带所需的时间,一般要求恢复时间小于0.02s。
仿真结果表明,ADRC控制在负载突变时能够快速补偿扰动,使电机转速迅速恢复到目标值,转速波动幅度和恢复时间均明显优于传统PID控制,具有较强的抗干扰能力。
6.3 稳态精度分析
观察PMSM电机在稳态运行时的转速跟踪误差和电流畸变率(THD)。稳态精度指标包括:
- 转速跟踪误差:稳态时电机实际转速与目标转速的偏差,一般要求转速跟踪误差小于0.5%。
- 电流畸变率(THD):电流中谐波成分占总有效值的百分比,一般要求电流畸变率小于3%。
仿真结果显示,ADRC控制能够实现高精度的转速跟踪,转速跟踪误差小;同时,电流波形正弦度好,电流畸变率低,具有较高的稳态精度。
七、结论与展望
7.1 研究结论
本研究针对永磁同步电机的控制问题,提出了一种基于自抗扰控制(ADRC)的控制策略,并通过MATLAB/Simulink仿真验证了该策略的有效性。仿真结果表明,ADRC控制能够有效提高PMSM的动态性能、抗扰性能和稳态精度,具有较强的鲁棒性和适应性,为PMSM的高性能控制提供了一种新的解决方案。
7.2 研究展望
- 参数自整定:结合在线学习算法(如强化学习)实现ADRC参数的自适应整定,进一步提高系统的自适应能力和控制性能。
- 硬件在环(HIL)验证:通过实时仿真平台(如dSPACE)验证ADRC在实际控制器中的性能,为ADRC的工程应用提供技术支持。
- 多电机协同控制:扩展ADRC至多机系统,解决多电机之间的耦合扰动问题,满足复杂工业应用的需求。
📚2 运行结果
2.1 模型搭建

2.2 自抗扰控制模块:

2.3 输出转矩

2.4 输出电流

2.5 电机转速

🎉3 参考文献
文章中一些内容引自网络,会注明出处或引用为参考文献,难免有未尽之处,如有不妥,请随时联系删除。
[1]刘彬.电动汽车永磁同步电机滑模自抗扰控制策略的研究[D].沈阳工业大学,2023.DOI:10.27322/d.cnki.gsgyu.2023.001454.
[2]刘明皓,周沛沅,许敏捷等.基于自抗扰控制的共轴直升机姿态控制律设计[J].海军航空大学学报,2024,39(01):123-130+146.

















 2万+
2万+

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









