



💥💥💞💞欢迎来到本博客❤️❤️💥💥
🏆博主优势:🌞🌞🌞博客内容尽量做到思维缜密,逻辑清晰,为了方便读者。
⛳️座右铭:行百里者,半于九十。
📋📋📋本文目录如下:🎁🎁🎁
目录
💥1 概述
调频连续波(FMCW)合成孔径雷达(SAR)模拟器研究
一、FMCW SAR基本原理与特点
-
信号波形与频率特性
FMCW SAR采用连续调频信号,其频率随时间线性变化(锯齿波、三角波等),通过比较发射与接收信号的频率差实现距离测量。与传统脉冲SAR相比,FMCW SAR具有以下特点:- 连续发射:波形周期性且幅度恒定,带宽(B)和脉冲重复间隔(PRI)决定分辨率。
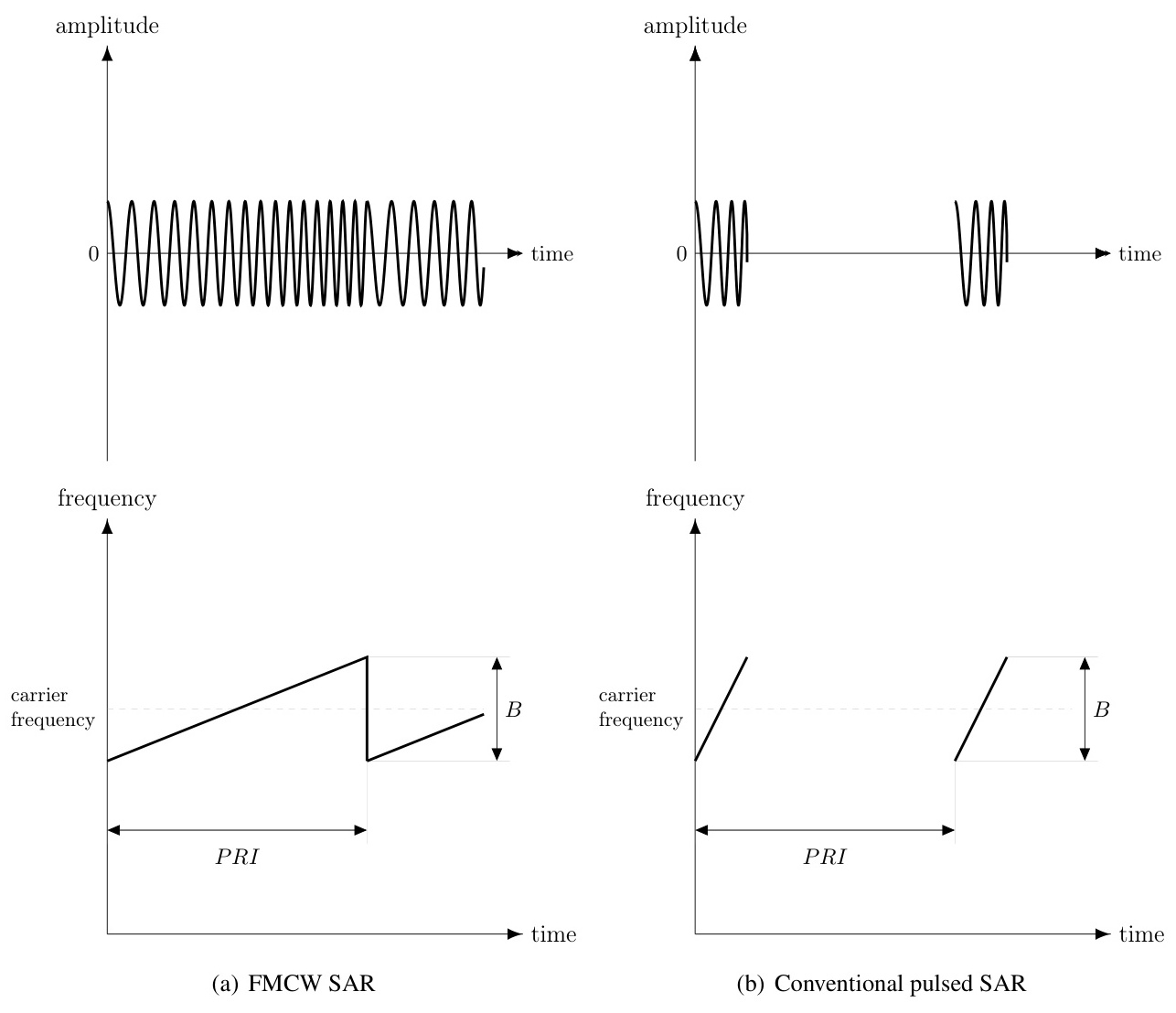
- 高分辨率与低功耗:适合轻量化平台(如无人机),适用于近距离高精度成像。
- 连续发射:波形周期性且幅度恒定,带宽(B)和脉冲重复间隔(PRI)决定分辨率。
-
与脉冲SAR的对比
参数 FMCW SAR 常规脉冲SAR 信号形式 连续调频波 短脉冲 峰值功率 低 高 硬件复杂度 简单(无高功率放大器) 复杂 适用场景 小型平台、短距离高分辨率 长距离、高速平台 运动补偿需求 需连续运动补偿(“停-走-停”假设失效) 脉冲间静止假设有效 (根据综合整理)
二、FMCW SAR模拟器系统架构
-
硬件模块
- 信号生成:基于VCO和PLL的频率合成器(如2.91 GHz VCO+PLL模块,),支持多种调频形式(三角波、锯齿波等)。
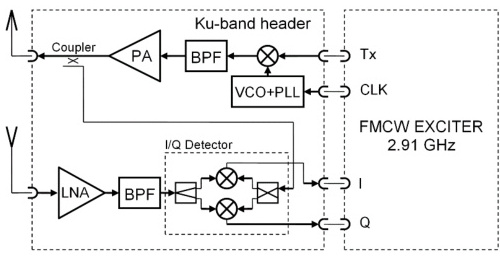
- 接收通道:低噪声放大器(LNA)、解调器(Dechirp模块)和ADC。
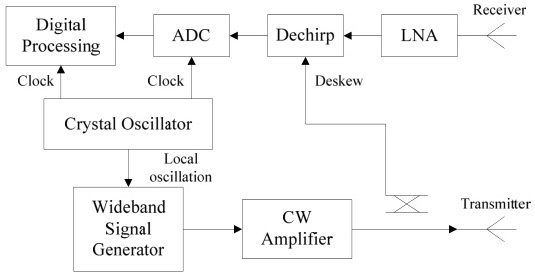
- 同步与控制:MIMO电缆或分路器实现收发同步。
- 信号生成:基于VCO和PLL的频率合成器(如2.91 GHz VCO+PLL模块,),支持多种调频形式(三角波、锯齿波等)。
-
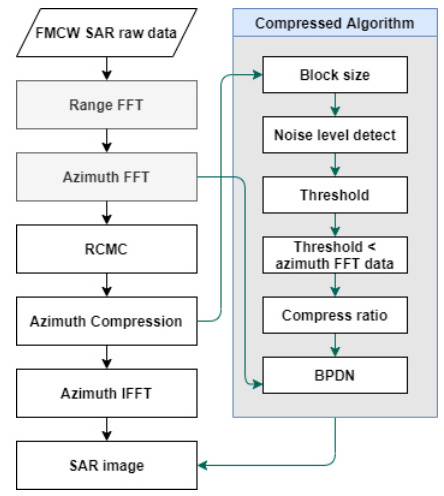
软件处理流程
Syntax error in textmermaid version 10.9.3
- 关键算法:改进的R-D算法(斜视模式补偿)、波数域算法(WDA)、稀疏成像。
三、关键技术参数与挑战
-
核心组件参数
- VCO:调谐范围(1.7–2.4 GHz)、相位噪声(-92.6 dBc/Hz @1 MHz)、功率效率(9.6%)。
- PLL:锁定范围(78.8–84 GHz)、带内相位噪声(-85.2 dBc/Hz @1 MHz)。
- ADC:采样率需覆盖信号带宽(如77 GHz系统需≥1 GHz采样率)。
-
信号处理挑战
- 运动补偿:平台连续运动导致距离-方位耦合,需动态校正。
- 非线性误差:调频线性度影响分辨率,需误差建模与实时校正。
- 计算复杂度:传统RMA算法的Stolt映射需优化内存与计算量。
四、算法实现与仿真工具
- 典型算法流程
- 改进R-D算法:
- 斜视模式下多普勒中心偏移校正。
- 联合多普勒补偿、Keystone变换和相位梯度自聚焦。
- 稀疏成像:基于Lq正则化降低数据量,支持实时处理。
-
Matlab仿真示例
% 雷达参数设置 fc = 77e9; % 载波频率77 GHz B = 4e9; % 带宽4 GHz Tp = 50e-6; % 调频周期50 μs fs = 2e6; % 采样率2 MHz R = 100; % 目标距离100米 % 生成FMCW信号 t = linspace(0, Tp, Tp*fs); Tx = exp(1j*pi*(B/Tp)*t.^2); % 发射信号 Rx = exp(1j*pi*(B/Tp)*(t-2*R/3e8).^2); % 接收信号(含时延) IF = Tx .* conj(Rx); % 解调后的中频信号 -
专用仿真工具
- SimWizardSSAD:用于反无人机系统的多雷达协同仿真。
- SAR模拟框架:支持单/双/多站配置,集成冯氏地表模型。
五、应用场景与案例
-
微型无人机载SAR
- 参数:4–12 GHz频段,分辨率≤0.5 m,功耗<50 W。
- 案例:旋翼无人机挂飞试验成功实现条带成像。
-
车载SAR
- 挑战:颠簸导致运动误差,需结合惯导数据实时补偿。
- 成果:在浓雾/暴雨中实现道路环境高分辨率监测。
-
广域GMTI(地面动目标检测)
- 算法:DPCA技术联合多普勒补偿,检测速度≥5 m/s的车辆。
六、技术挑战与未来方向
-
硬件瓶颈
- 高频段实现:W波段(77–84 GHz)VCO的相位噪声控制。
- 集成度:CMOS工艺下的多通道集成(如MIMO雷达)。
-
算法优化
- 实时性:多核DSP(如TMS320C6678)并行处理,计算效率提升40%。
- 鲁棒性:抗干扰算法(如频率跳变)应对电子战环境。
-
新兴技术融合
- AI辅助成像:基于YOLOv5的雷达图像目标检测。
- 量子雷达技术:提升抗噪声与分辨率潜力。
七、结论
FMCW SAR模拟器通过软硬件协同设计,在轻量化平台高分辨率成像中展现出显著优势。未来需进一步解决高频段信号稳定性、复杂运动补偿及实时处理等挑战,推动其在军民领域的广泛应用。
📚2 运行结果


主函数部分代码:
clear all;
close all;
% Radar parameters
% carrier frequency [Hz]
fc = 11e9;
% bandwidth [Hz]
B = 100e6;
% pulse duration [s]
T = 1e-6;
% Constants
% speed of light [m/s]
c = 3e8;
% Imaging parameters
% start range [m]
start_range = 0;
% end range [m]
end_range = 100;
% range cell size [m]
cell_size = c/(2*B)/5;
% face sampling density [m]
sampling_density = cell_size;
% Scene definition
% Scene can be defined by hand (as in this example), but also imported from
% an external tool.
% Scene consists of points and faces defined by vertices
% Reflecting points, not belonging to any face (x,y,z,magnitude,phase)
point = [
5,0,0,0.5,0;
5,0,50,1,pi/2;
];
% Vertices - non reflecting points, forming faces (x,y,z)
vertex = [
-10,-10,-10;
-10,-10,10;
-10,10,10;
-10,10,-10;
-20,-5,-5;
-20,-5,5;
-20,5,5;
-20,5,-5;
];
% Reflecting faces (v1,v2,v3,transparency,roughness,magnitude,phase)
face(1).v = [1,2,3];
face(2).v = [3,4,1];
[face(1:2).transparency] = deal(0.5);
🎉3 参考文献
文章中一些内容引自网络,会注明出处或引用为参考文献,难免有未尽之处,如有不妥,请随时联系删除。
[1]李家强,任梦豪,姚昌华,等.基于轻量化YOLOv5的雷达图像道路目标检测方法[J/OL].中国电子科学研究院学报:1-13[2024-07-17].http://kns.cnki.net/kcms/detail/11.5401.TN.20240715.1229.002.html.
[2]江凯.空天基合成孔径雷达多域抗干扰技术综述[J/OL].雷达科学与技术:1-20[2024-07-17].http://kns.cnki.net/kcms/detail/34.1264.tn.20240711.1741.002.html.
🌈4 Matlab代码实现


















 2444
2444

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









