






carsim-simulink四轮转向汽车联合仿真,LQR控制路径跟踪文件(.slx文件,.cpar文件)
ID:9825713376009919
707AA

carsim-simulink四轮转向汽车联合仿真,LQR控制路径跟踪文件(.slx文件,.cpar文件)
在现代汽车工程领域,汽车仿真是一项至关重要的技术。通过模拟车辆行驶过程,汽车仿真能够帮助工程师评估车辆性能、优化控制策略以及加速产品开发过程。本文将介绍一种基于carsim-simulink的四轮转向汽车联合仿真方法,并结合LQR控制路径跟踪文件进行深入分析。
为了实现汽车的全面仿真,我们首先需要搭建一个合适的仿真环境。carsim-simulink是一种常用的汽车仿真工具组合,其中carsim可以实现车辆动力学仿真,而simulink则负责车辆控制系统的设计和仿真。通过将两个工具相互结合,我们能够更加准确地模拟车辆行驶过程,并根据不同的控制算法进行优化。
在汽车控制领域中,LQR控制是一种常用的优化控制策略。LQR控制的核心思想是通过对系统状态和输入变量的加权组合来最小化系统的性能指标。在路径跟踪任务中,LQR控制可以帮助我们实现车辆沿着预定路径行驶,并保持良好的稳定性和鲁棒性。
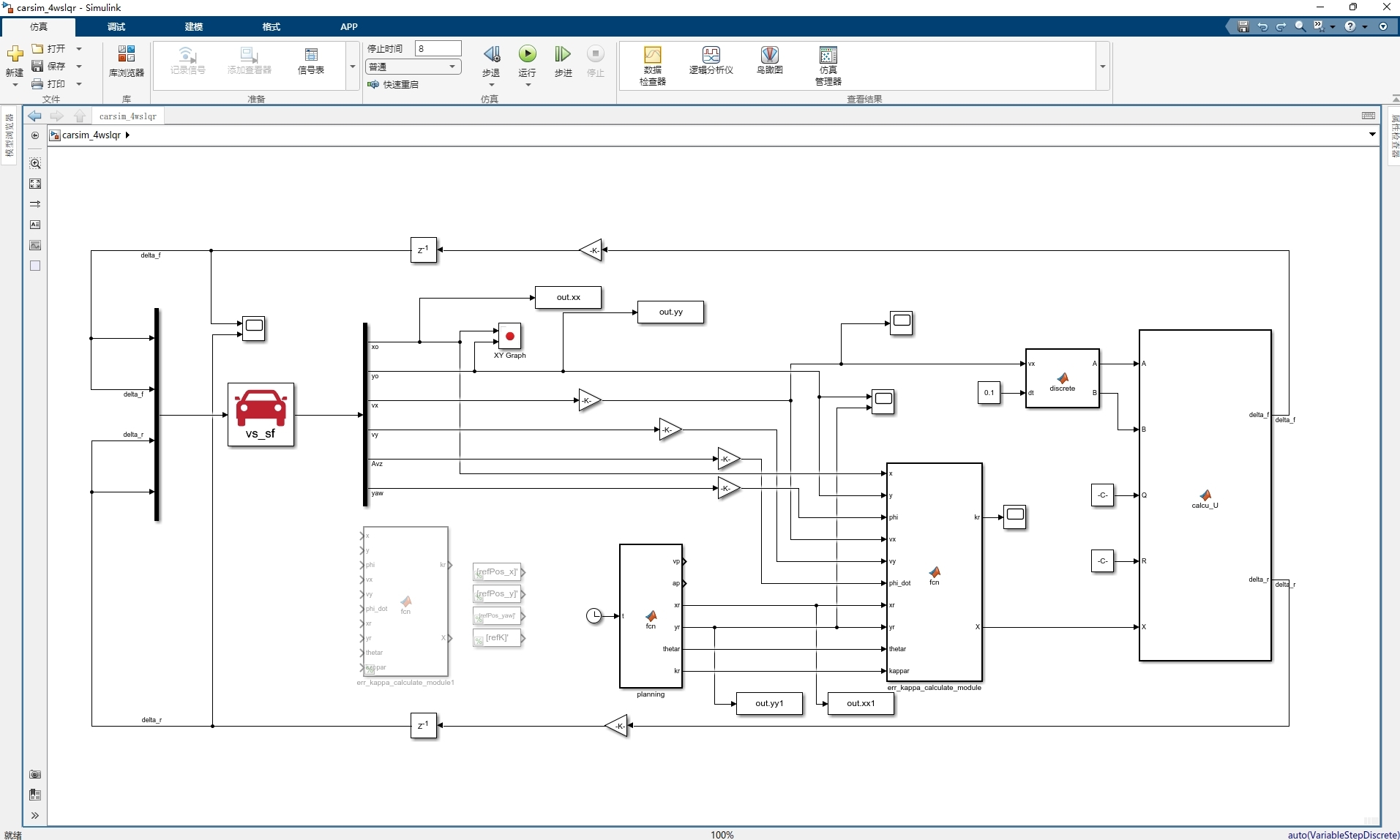
为了实现LQR控制路径跟踪,我们需要使用到两个关键文件:.slx文件和.cpar文件。.slx文件是simulink的模型文件,其中包含了车辆控制系统的设计和仿真。通过在.slx文件中定义车辆模型、控制器和仿真参数,我们能够灵活地调整仿真环境,以满足不同的需求。.cpar文件是carsim的参数文件,其中包含了车辆动力学参数和路面特性参数。通过调整.cpar文件中的参数,我们能够准确地描述车辆的运动特性和路面情况,从而提高仿真的精确度。
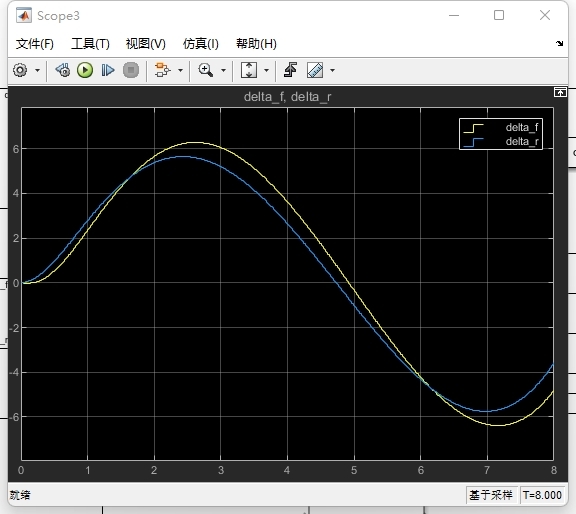
在进行四轮转向汽车联合仿真时,我们需要考虑到转向系统的控制。通过在.slx文件中设计转向控制器,我们能够实现对车辆转向系统的仿真和优化。在仿真过程中,我们可以通过修改转向控制器参数,观察车辆的转向性能变化,并找到最佳的控制策略。通过与LQR控制路径跟踪结合,我们能够实现车辆的准确跟踪和稳定行驶。
综上所述,carsim-simulink四轮转向汽车联合仿真结合LQR控制路径跟踪文件是一种强大的汽车仿真方法。通过该方法,我们能够更加准确地模拟车辆行驶过程,并优化车辆的控制性能。在未来的汽车工程中,这种技术会扮演越来越重要的角色,帮助我们设计和开发更加安全、高效的汽车系统。
【相关代码,程序地址】:http://fansik.cn/713376009919.html


















 1582
1582

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









