




 本文详细介绍了mAP(mean average precision)的计算方法,包括最常用的VOC2012中的mAP计算方式,并通过实例对比了不同检测器的效果,探讨了识别与定位准确性对mAP的影响。
本文详细介绍了mAP(mean average precision)的计算方法,包括最常用的VOC2012中的mAP计算方式,并通过实例对比了不同检测器的效果,探讨了识别与定位准确性对mAP的影响。
一、mAp(mean average precision)
这一部分分析常见的mAp的计算方法。
首先来介绍最常用的mAp计算方法(VOC2012中所用到的)。
先做一个概述:
检测器对每一张图片进行检测,给出DR b-box
将所有图片的DR b-box集中,按照DR b-box给出的label进行分类
对于每个类别:
将属于该类别的DR b-box按confidence降序排列。
使用该类别的GT b-box去进行匹配(不重复)
得到False Positive和True Positive
接下来计算类Ci的Ap(average precision)
mAp = 所有类Ap的和 / 类的个数
得到mAp以下为一个较为详细的伪代码:
检测器对每一张图片进行检测,给出DR b-box
将所有图片的DR b-box集中,按照DR b-box给出的label进行分类
for Ci in All Classes:
N = 标签为Ci的GT b-box个数。
记Di,为得到标签为Ci的DR b-box集合
将按照confidence降序排列
TP[size(Di)]=0
FP[size(Di)]=0
for d in Di:
取得d所在的图像fig_d
#接下来在fig_d中出现的GT b-box中匹配与d标签相同且IoU最大的GT
max_IoU = 0
best_match_GT = NULL
for g in GT b-box:
if g in fig_d:
if label of g == label of d:
if IoU(g, d) > max_IoU:
best_match_GT = g
max_IoU = IoU(g, d)
#接下来计算FP,TP
如果匹配best_match_GT不存在:
FP[d] = 1
如果匹配得到的max_IoU过小(<0.5):
FP[d] = 1
如果匹配存在并且overlap够大:
如果best_match_GT已经匹配过了:
FP[d] = 1
否则:
TP[d] = 1
#接下来计算类Ci的Ap(average precision)
Prc_array[len(Di)]
Rec_array[len(Di)]
for k = 1 : 1 : len(Di):
取Di中前k个为预测的正例,记为集合Pk
精度Prc = Pk中的TP的数量 / k #分子可以通过TP数组算出
召回率Rec = Pk中TP的数量 / N
Prc_array[k] = Prc
Rec_array[k] = Rec
根据Prc_array和Rec_array计算出Ap
Ap = 根据Prc_array和Rec_array得到的PR曲线下的面积(积分)
# Ap的计算方法有多种,在VOC2012中,就是先对PR曲线进行处理,使得它
# 必定单调下降,之后再计算曲线下面积。
# 根据每个类的Ap计算出mAp(mean average precision)
mAp = 所有类Ap的和 / 类的个数
得到mAp。 可以看出来,mAp的计算将识别与定位的准确性同时考虑到了,它是以识别部分给出的confidence为基础(PR曲线绘制时使用的阈值就是confidence的阈值),结合定位给出的IoU来评估检测器的。其中涉及到的TP、FP概念在前一节中有所讨论。对于一个完美的检测器,其对于每一种类别,对于任意的Recall,Precision都是1,Ap就是1,最后mAp就是1。我们也可以提出一种以IoU为基础(PR曲线绘制时使用的阈值是IoU的阈值),结合识别的confidence来评估检测器的方法,流程与上面的mAp类似:
检测器对每一张图片进行检测,给出DR b-box
将所有图片的DR b-box集中,按照DR b-box给出的label进行分类
对于每个类别:
在每张图片中使用GT b-box去进行匹配(不重复),得到对应GT b-box
将属于该类别的DR b-box按匹配后与GT b-box的IoU值降序排列。
得到False Positive(如果标签不一致或者confidence过小)和True Positive
接下来计算类Ci的Ap(average precision)
mAp = 所有类Ap的和 / 类的个数
得到mAp两者的出发点稍有区别,但是对于TP和FP的观点是一致的,至于说哪个好,还需要更详细的分析。(对于样本个数、类别均衡度的鲁棒性分析需要)
我们假设两种较为极端的检测器,将空间感知能力以及识别能力分开考虑。另外考虑分类器分的过多和过少的情况。
第一种检测器Dtn1,它对于位置的感知极为准确,但是它的分类能力一般,总体上只能有50%的可能性分对。我们考虑两种算法的Ap。
第一种算法,对于任意的confidence阈值,在前面都有大约一半的TP,因此Precision为0.5,最大的召回率为0.5,而FP只由分类错误产生,因此最终有0.25的Ap。假设检测器有m的可能性分对,则Ap为m^2(样本非常多的情况下)。
第二种算法,IoU阈值在这里失去了作用,对于任意的IoU阈值,前面都有大约一半分错,由于confidence过小的也会筛除掉,因此会更少一些,最大的召回率是一样的,Ap会略小于0.25。假设有m的可能性分对,则Ap为m^2。
第二种检测器Dtn2,它对于位置的感知一般,平均的与GT的IoU为0.5,但是分类能力极好,只要有一小部分的GT与其重合,那么它就能分类出来。
二、其他的一些讨论
https://zhuanlan.zhihu.com/p/56899189
具体计算一些这里面的一些例子,来更深刻的理解mAP
结果是:

下面来计算一下为什么是这样:
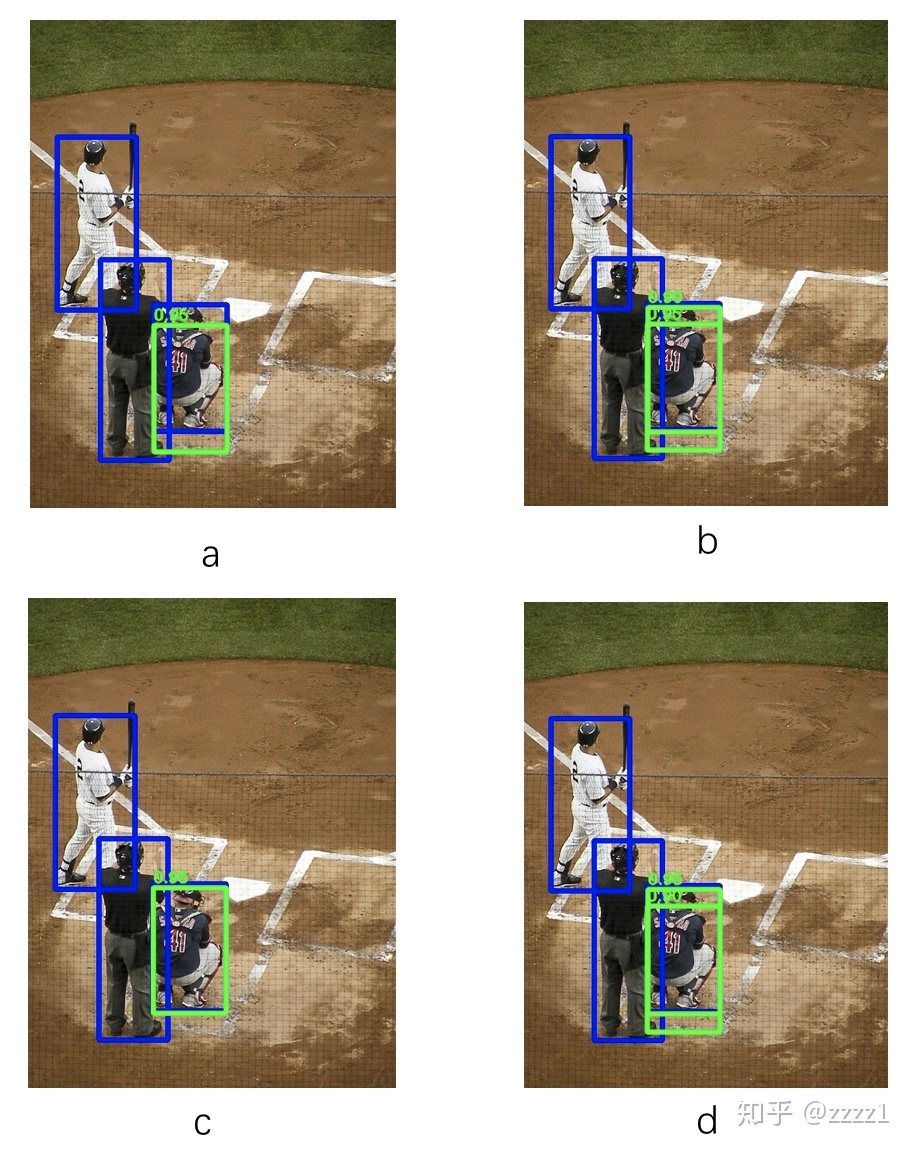
mAP一共取了0.5, 0.55, 0.6, 0.65, 0.7, 0.75, 0.8, 0.85, 0.9, 0.95共10个阈值。
在mAP0.5处,Recall最多为0.33,精度为1,所以mAP均为0.33。至于为什么是0.337,在回答中有所解释:直观来看Recall最大为0.33,所以0-0.33期间Precision都为1。那么计算下来mAP应该等于0.33才对。但是实际上COCO计算mAP时使用了recall = [0, 0.01, ..., 1.00]共101个采样点,因此共有34(0到0.33)个点的Precision=1,其余均为0。所以其mAP为 34/101 约等于0.337。
在mAP0.75处:
A:没有匹配,mAP=0
B:0.96的DT是FP,0.90的DT是TP,此时Recall达到0.337,Precision为0.5,mAP=0.337 * 0.5 = 0.168
C:匹配上,mAP=0.337
D:0.96的DT是TP,此时Recall=0.337,Precision为1。之后的DT是FP,Precision=0.5。但由于相同Recall下,Precision取最大值,Precision=1,mAP=0.337 * 1 = 0.337

















 1万+
1万+

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









