



W1000介绍
DW1000DW1000(官方网站)是一个完全集成的低功耗射频收发器,遵循IEEE 802.15.4-2011 超宽带标准。它可以被用于双向测距或者TDOA定位系统中,精度为10cm。它使用了从3.5Ghz-6.5Ghz的6个射频频段,支持100kbps、850kbps、6.8Mbps的数据速率,并且可以在多径环境下进行处理,所以可在高反射的环境下应用。
SPI接口
- 主机系统通过SPI读取和写入DW1000寄存器,当DW1000的复位或从睡眠状态唤醒时,通过GPIO5和GPIO6确定SPI的工作模式。可以在DW1000的一次性可编程配置块内(OTP)设置SPI模式,以避免需要任何外部组件,并使GPIO5和GPIO6自由的使用。
- 本节介绍SPI交互的格式。
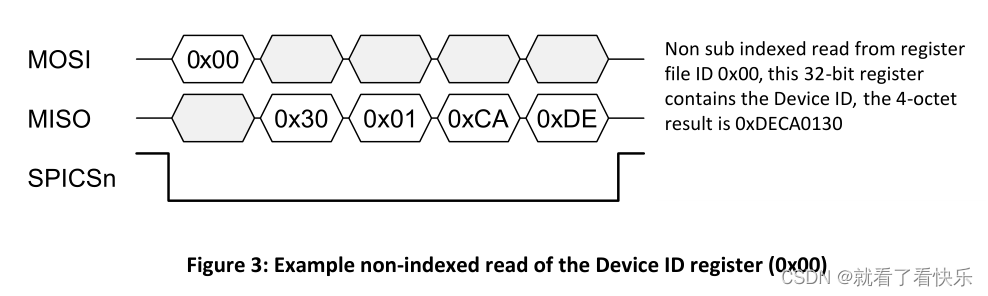
每个SPI交互从一到三个八位字节的事务头开始,然后是组成交互数据的可变数量的八位字节。SPI传输中允许的数据字节数不受限制。交互头选择交互是读还是写,并指定从中读取或写入的地址。

下图显示了简单非索引SPI事务的一个八位字节事务头中的字段。位6为零,表示不存在子索引,:
交互的其余八位字节,即交互主体,紧跟在这一个八位字节头之后:
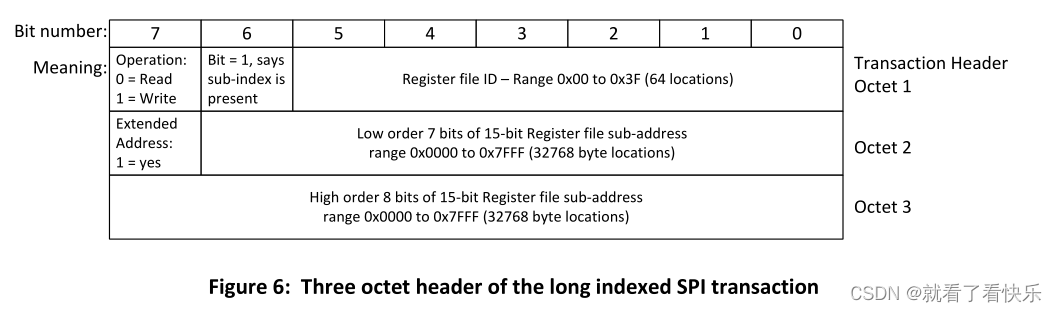
两个交互头与三个交互头的情况:

中断
DW1000可以配置在一个或多个事件发生时使用它的中断引脚,来通知外部控制器处理发生的事件。中断引脚的极性可以通过系统控制寄存器(Register file: 0x04 – SystemControl Register)的HIRQ_POL位来设置。上电后默认的极性为高电平,这也是确保DW1000在睡眠和深度睡眠设备状态下的最低功率运行的推荐极性。当DW1000在睡眠或者深度睡眠的时候,中断引脚处于浮空状态,这时除非外部有下拉电阻,否则可能会触发虚假的中断。一个在系统事件状态寄存器( Register file: 0x0F – System Event Status Register )中的事件发生后是否触发中断,这取决于在系统状态屏蔽寄存器(Register file: 0x0E – System Event Mask Register)中对应位的设置。
GPIO
DW1000 提供了8个GPIO引脚可以由用户进行独立的配置。任何一个被配置为输入的引脚的电平状态,都可以被读取并上报给控制主机通过SPI接口,当配置为输出时,控制主机也可以通过SPI接口设置其电平。
一些GPIO还有一些复用功能,如下表:

GPIO引脚的配置和操作可以通过GPIO控制和状态寄存器( Register file: 0x26 – GPIO control and status)来完成:

DW1000工作状态
先看官方流程图:
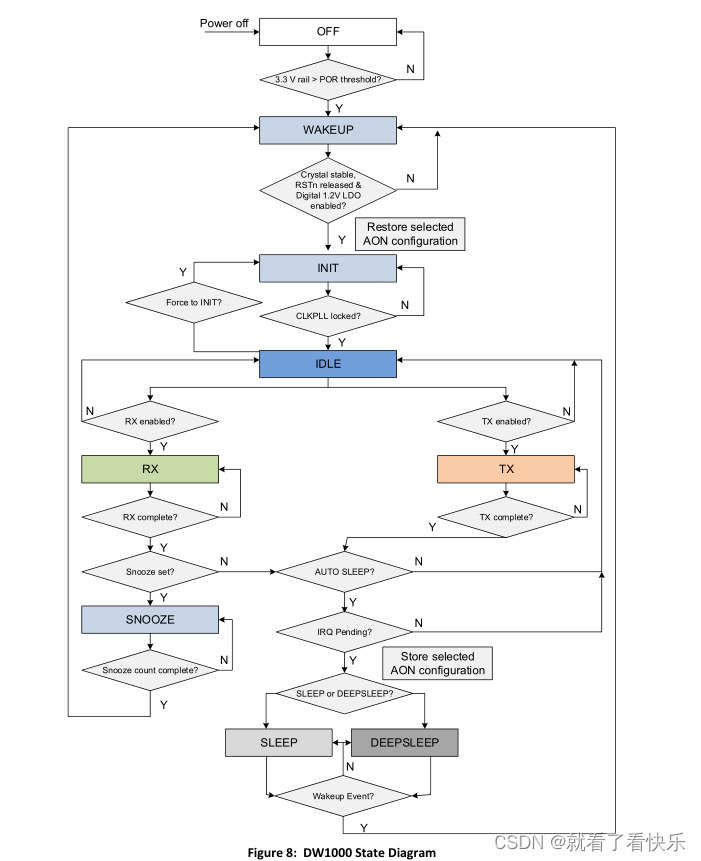
- OFF
在关闭状态下,DW1000完全断电,没有电压施加到任何输入引脚,功耗=0µA。 - WAKEUP
在唤醒状态期间,晶体振荡器被启用。大约4毫秒后,数字LDO将启用,RSTn(输出)将解除禁用,允许DW1000进入初始状态。 - INT
在初始化状态下,主晶体振荡器正在运行。原始38.4 MHzXTAL振荡器频率除以2,得到19.2MHz内部时钟,称为XTI。在初始化状态下,DW1000的数字电路由该19.2MHz XTI时钟供电。如果DW1000已从睡眠或深度睡眠状态进入初始化状态(或由于复位),则可以从AON内存自动恢复寄存器配置。然后,DW1000打开CLKPLL,5µs后,CLKPLL将被锁定,DW1000将自动转换为空闲状态。 - IDLE
在空闲状态下,DW1000内部时钟发生器CLKPLL被锁定运行并准备使用,但被选通至大多数电路以最小化功耗。在空闲状态下,SPI通信可以在最大SPICLK频率20 MHz下工作。在空闲状态下,模拟接收和发送电路断电。外部主机可以控制DW1000启动发送或接收,从而使DW1000分别进入TX状态或RX状态。如果启动延迟发送或接收操作,则DW1000将保持空闲状态,直到延迟时间过去,之后将进入发送状态或接收状态。 - TX
在TX状态下,DW1000在配置的RF信道上使用配置的传输参数(PRF、数据速率、前导码等)主动传输包含传输缓冲器内容的帧。一旦帧传输完成,DW1000可根据编程配置进入三种模式之一。帧传输完成后,除非设置了ATXSLP位,否则DW1000将返回空闲状态,在这种情况下,DW1000将自动进入睡眠或深度睡眠状态(只要没有主机中断挂起)。 - RX
在RX状态下,DW1000接收机是活动的,或者搜索前导码,或者(一旦检测到前导码)主动接收前导码搜索SFD,然后接收PHR,解码它并接收帧的数据部分。在RX状态下,RF合成器和所有RX块处于活动状态。在结束接收的事件(良好帧接收,或中止接收的某些错误或超时事件)后,DW1000将返回空闲状态,除非设置了ARXSLP位(在子寄存器0x36:04–PMSC_CTRL1中),在这种情况下,DW1000会自动进入睡眠或深度睡眠状态(只要没有主机中断挂起)。
通电时的默认配置
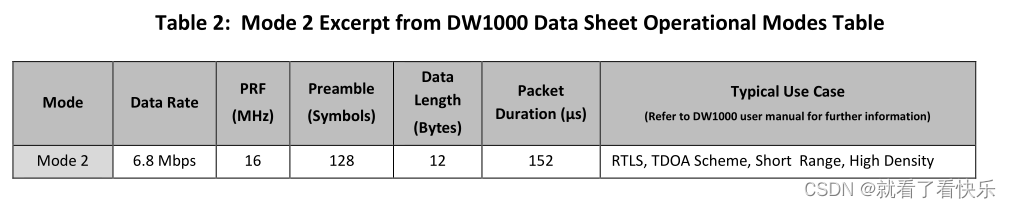
默认配置可概括为信道5、前导码4和模式2。其他默认配置看官方用户手册。
模式2图:

















 1044
1044

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









