



 文章介绍了如何在MATLAB的Object-orientedMATLABAdaptiveOptics(OOMAO)平台上,使用DeformableMirror补偿像差,通过测量响应函数和Zernike系数,实现AO系统对高阶Zernike多项式的拟合,以提高光学系统的波前校正精度。
文章介绍了如何在MATLAB的Object-orientedMATLABAdaptiveOptics(OOMAO)平台上,使用DeformableMirror补偿像差,通过测量响应函数和Zernike系数,实现AO系统对高阶Zernike多项式的拟合,以提高光学系统的波前校正精度。
一、目的:使用DM拟合zernike多项式
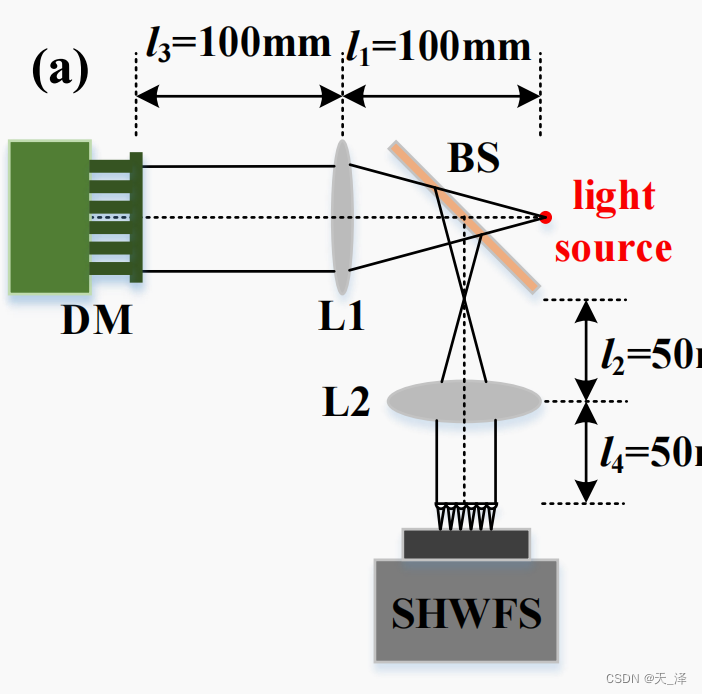
Deformable mirror(DM)可以用于补偿哈特曼波前探测器(或者其他探测器)测得的像差,假定该像差为zernike多项式中的某些项,若要补偿掉这部分的像差,则DM就应该拟合出对应的面形。因此,本文将介绍如何在仿真中实现它。
使用工具介绍:MATLAB,Object-oriented Matlab adaptive optics(OOMAO)【GitHub - rconan/OOMAO: Object-Oriented, Matlab & Adaptive Optics】
后者是一个adaptive optics (AO)仿真平台,可以完成望远镜系统中的AO校正像差的过程。
二、做法:
1. 测响应函数
当 DM 表面被驱动器推动时,其实际产生的面形称为其响应函数。即单独对一个驱动器施加恒定电压,使其镜面产生相应的形变后,平行光波经镜面反射再由 波特曼波前探测器(SHWFS)测得畸变波前的斜率值或 Zernike 系数。而整个 DM 的响应函数的测量,则通过对所有驱动器重复相同的操作,最终确定出恒定输入(电压值)和输出(斜率值或 Zernike 系数)之间的静态的线性映射。 可以参照【变形镜的Matlab仿真实现】这一篇进行理解。
2.AO 系统的校正原理
步骤1,t 时刻,相位为 φi(x, y, t) 的畸变波前入射到DM上;
步骤2,光束从DM反射并入射到 SHWFS,SHWFS测的波前斜率;
步骤3,在测得的斜率响应矩阵作用下,t时刻的波前斜率测量值 被转换成 施加到DM上的电压值;
步骤4,DM根据电压拟合出对应的面形,来抵消畸变波前中的一部分相位(PID算法),计算当前波前的RMS值。若RMS值 > 某一阈值,则重复 步骤1-2-3-4;
步骤5,RMS值是一种收敛的曲线,且已经达到了最低效果,此时校正完毕。
使用AO系统拟合zernike多项式的原理也是如此,之所以要拟合zernike多项式的原因是:评价DM用于拟合高阶zernike多项式的品质,即能否保留下高频信息。
3.代码实现
使用21x21的DM,先测响应矩阵函数
clc;clear all ;close all
%{
目的:用DM拟合zernike多项式;
先测DM的的响应函数,根据根据哈特曼测得的斜率==> 驱动电压
==> 施加到DM产生补偿面形。
%}
atm = atmosphere(photometry.V,0.15,30,...
'altitude',[0,4,10]*1e3,...
'fractionnalR0',[0.7,0.25,0.05],...
'windSpeed',[5,10,20],...
'windDirection',[0,pi/4,pi]);
nLenslet = 20;
nPx = nLenslet * 10;
tel = telescope(3.6,...
'fieldOfViewInArcMin',2.5,...
'resolution',nPx,...
'samplingTime',1/300);
cam = imager('diameter',tel.D, 'fieldStopSize',20,'nyquistSampling',8);
ngs = source('wavelength',photometry.J,'magnitude',5);
wfs = shackHartmann(nLenslet,nPx,0.75);
ngs = ngs.*tel*wfs*cam;
wfs.INIT
+wfs;
figure(1);imagesc(cam.frame);colormap(jet);colorbar;title('理想PSF')
bif = influenceFunction('monotonic',50/100);
nActuator = nLenslet + 1; % 某一方向上的 驱动器个数 比 子透镜个数多1
dm = deformableMirror(nActuator,...
'modes',bif,...
'resolution',nPx,...
'validActuator',wfs.validActuator);
name = ['DMIM_',num2str(nActuator),'nActuators','.mat'];
if exist (name,'file') == 0
fprintf('DM的响应函数不存在,计算中...\n')
DM_mode = [];
Sx = [];
figure(2)
for i = 1:length(dm.coefs)
dm.coefs(i) = 0.3038*1e-7;
ngs = ngs.*tel *dm*wfs*cam; % ngs.*tel *dm*wfs*cam;
Sx(:,i) = wfs.slopes;
DM_mode(:,:,i) = dm.surface;
dm.coefs(i) = 0;
ngs = ngs.*tel *dm*wfs*cam;
end
Slope = Sx / 0.3038 ;
save(name, 'Slope','DM_mode')
else
fprintf('响应函数已经存在,不计算\n')
load(name)
end
figure(5);
subplot(121);imagesc(Slope);colorbar;colormap(jet)
subplot(122);imagesc(pinv(Slope));colorbar;colormap(jet)
再进行拟合实验
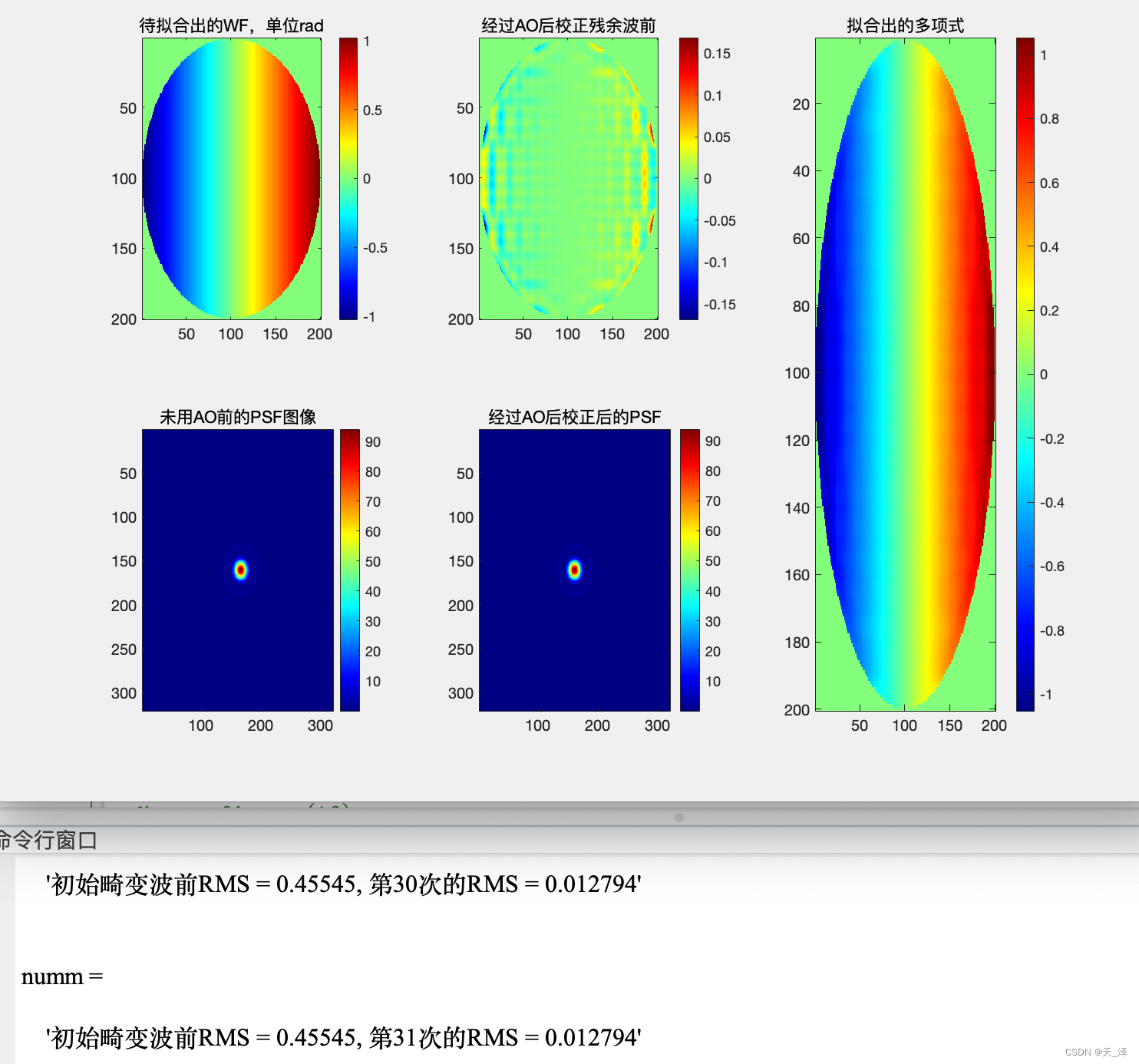
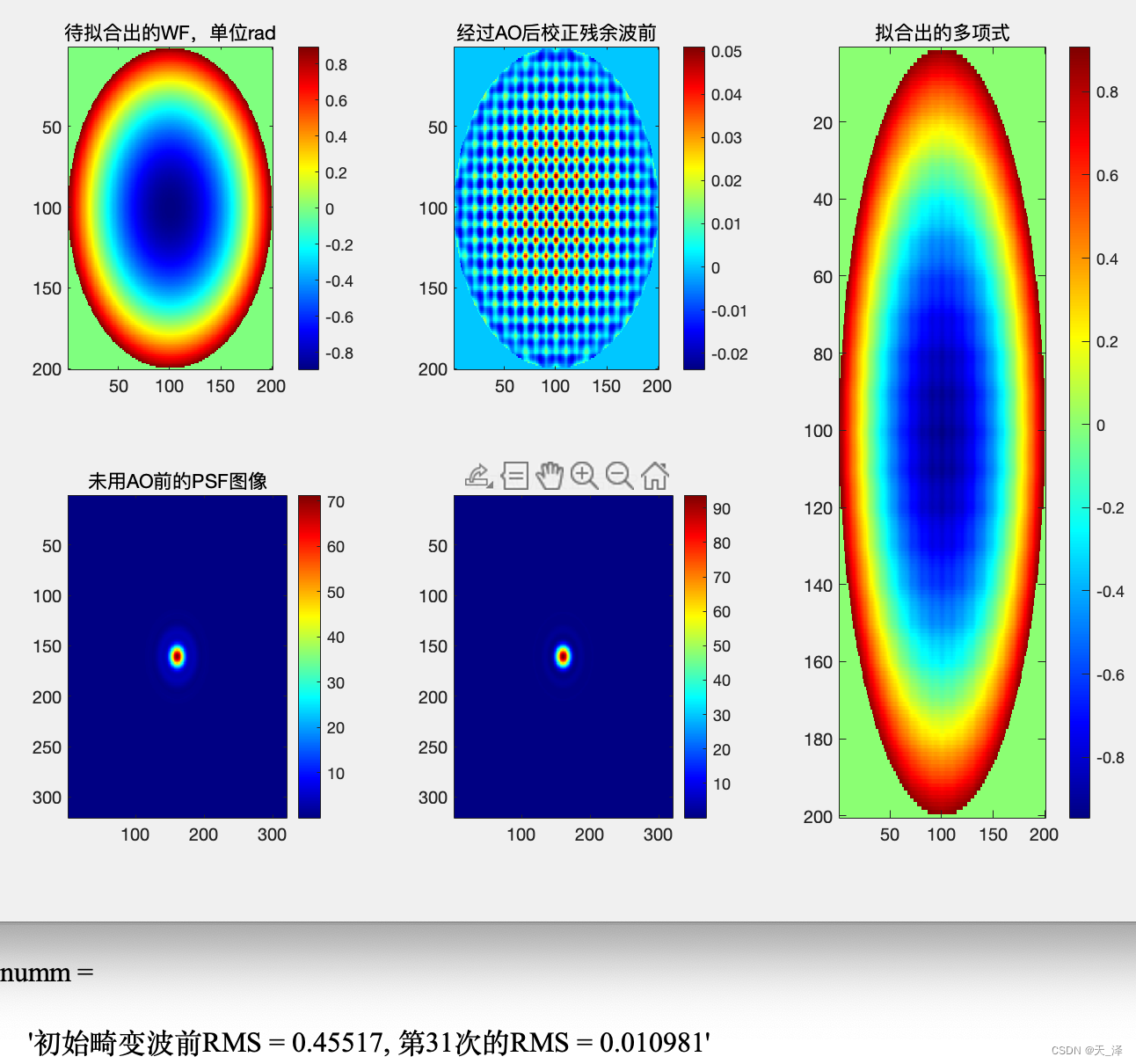
DMvot_total = []; % 拟合多项式需要的电压 modes = 35; for j = 1:35 zernn = zernike(2:modes+1,'resolution',nPx); C = zeros(modes,1); C(j) = 0.1 * 1e-6; % 拟合第i个Zenrike zernn.c = C; ngs = ngs.* zernn*wfs*cam ; WF_ini = ngs.meanRmPhase; loopGain = 0.030; row = 2; column = 3; figure(3) subplot(row,column,1);imagesc(WF_ini);colorbar;colormap(jet);title('待拟合出的WF,单位rad') subplot(row,column,4);imagesc(cam.frame);colormap(jet);colorbar;title('未用AO前的PSF图像') RMS_ini = std(WF_ini); i = 1; RMS = []; DM_vot = []; flag = 1; while (flag == 1) ngs = ngs * dm * wfs * cam; dm.coefs = 0.4*dm.coefs - loopGain* pinv(Slope) * wfs.slopes *1e-6; % 单位 要到um级别 DM_vot(:,i) = dm.coefs; subplot(row,column,5);imagesc(cam.frame);colormap(jet);colorbar;title('经过AO后校正后的PSF') subplot(row,column,2);imagesc(ngs.meanRmPhase);colorbar;colormap(jet);title('经过AO后校正残余波前') subplot(row,column,[3,6]);imagesc(WF_ini - ngs.meanRmPhase);colorbar;colormap(jet);title('拟合出的多项式') numm = ['第',num2str(i),'次的RMS = ',num2str( std(ngs.meanRmPhase(:)) )] RMS(:,i) = std(ngs.meanRmPhase(:)); if ( i > 30 && (RMS(:,i-1) - RMS(:,i) < 1e-3) ) flag = 0; end drawnow; pause(0.1) i = i+1; end DMvot_total(:,j) = sum(DM_vot,2) * 1e6 ; end
三、结果
1. 拟合倾斜模式的情况
2. 拟合离焦模式情况
3. 其他模式,自己从github上下载OOMAO包,使用上述代码即可运行了哦。

















 1043
1043

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









