






1. 方案简介
自学习:在识别前对物体图片进行模型学习,训练完成后通过算法分类得出图像的模型ID。
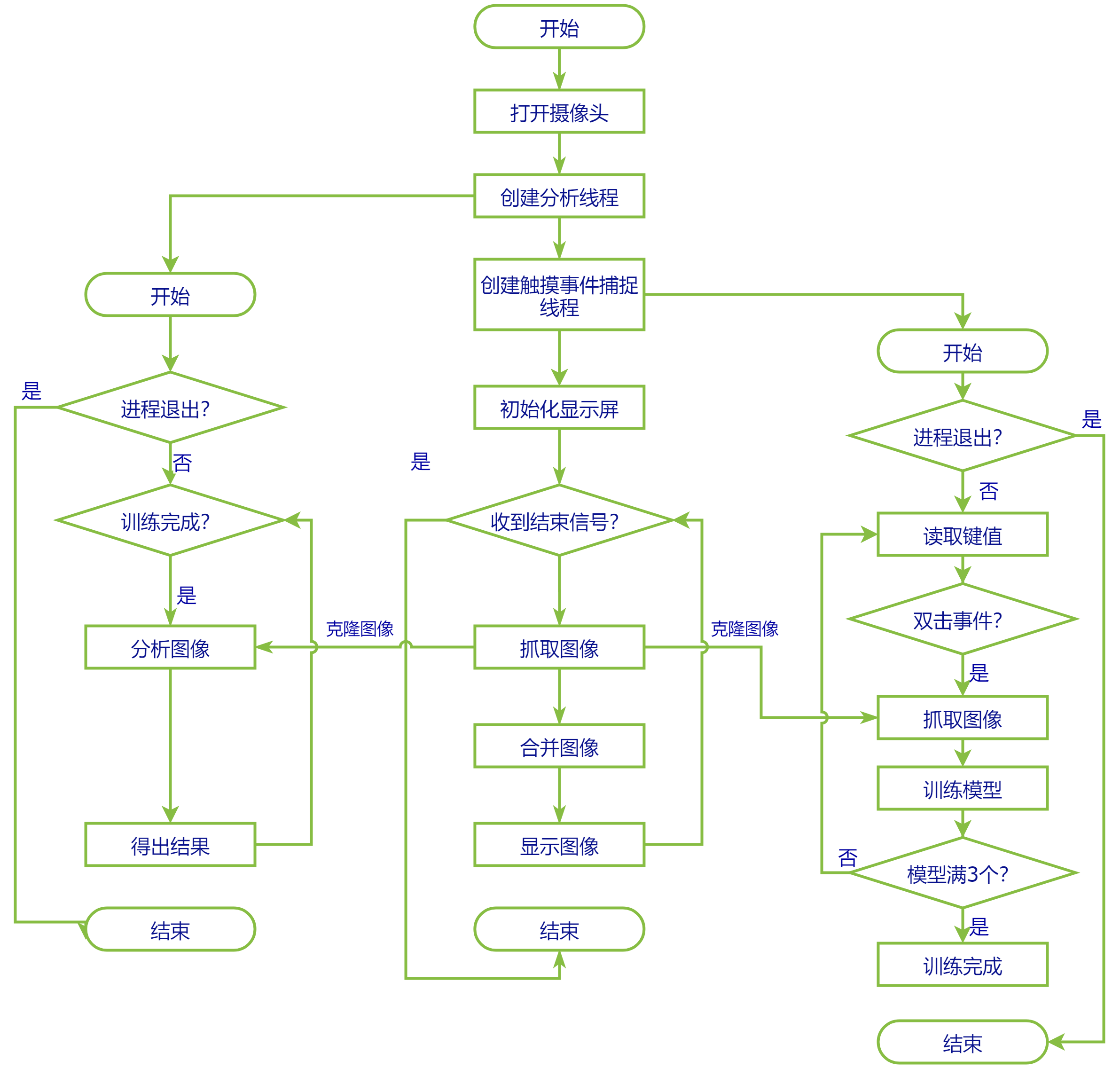
方案设计逻辑流程图,方案代码分为分为两个业务流程,主体代码负责抓取、合成图像,算法代码负责训练和检测功能。
2. 快速上手
2.1 开发环境准备
如果您初次阅读此文档,请阅读《入门指南/开发环境准备/Easy-Eai编译环境准备与更新》,并按照其相关的操作,进行编译环境的部署。
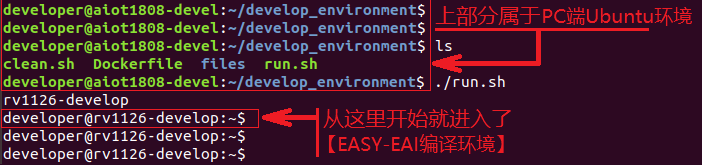
在PC端Ubuntu系统中执行run脚本,进入EASY-EAI编译环境,具体如下所示。
cd ~/develop_environment
./run.sh
2.2 源码下载以及实例编译
在EASY-EAI编译环境下创建存放源码仓库的管理目录:
cd /opt
mkdir EASY-EAI-Toolkit
cd EASY-EAI-Toolkit
通过git工具,在管理目录内克隆远程仓库
git clone https://github.com/EASY-EAI/EASY-EAI-Toolkit-C-Solution.git
注:
* 此处可能会因网络原因造成卡顿,请耐心等待。
* 如果实在要在gitHub网页上下载,也要把整个仓库下载下来,不能单独下载本实例对应的目录
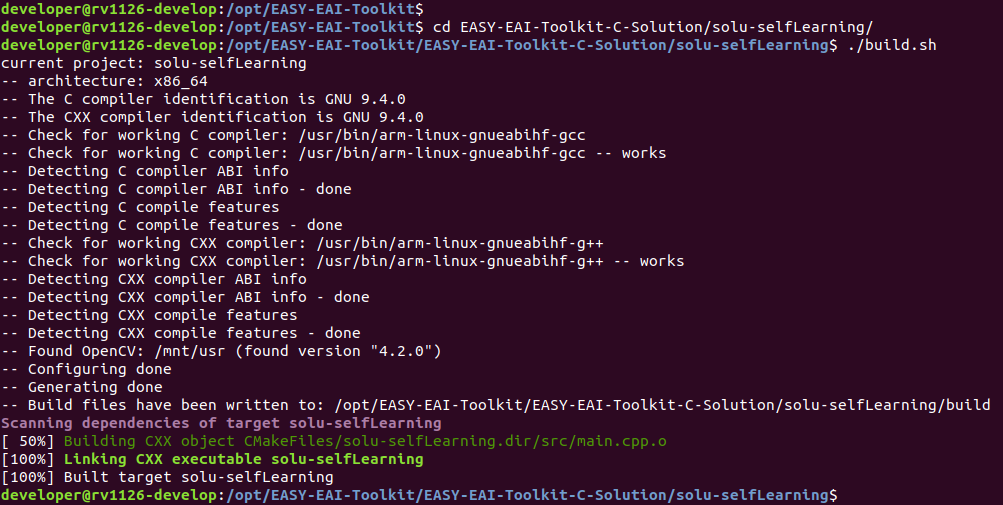
进入到对应的例程目录执行编译操作,具体命令如下所示:
cd EASY-EAI-Toolkit-C-Solution/solu-selfLearning/
./build.sh
注:
* 由于依赖库部署在板卡上,因此交叉编译过程中必须保持adb连接。
注:
* 若build.sh脚本不带任何参数,则仅会拷贝solution编译出来的可执行文件。
* 若build.sh脚本带有cpres参数,则会把Release/目录下的所有资源都拷贝到开发板上。
* 若build.sh脚本带有clear参数,则会把build/目录和Release/目录删除。
2.3 模型获取
【百度网盘】
链接:百度网盘 请输入提取码
提取码:0k7j

本方案用到模型:classify.model
直接把模型下载到本地Windows主机,复制。再进入PC端Ubuntu创建存放model目录:
cd /opt
mkdir model
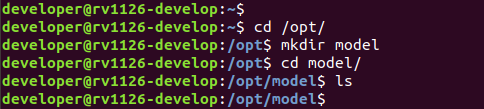
然后把模型从本地Windows主机粘贴到PC端Ubuntu中:
2.4 方案部署
使用下方命令再次回到开发实例目录
cd /opt/EASY-EAI-Toolkit-C-Solution/solu-selfLearning/然后,将EASY-EAI编译环境的编译结果部署到板卡中(有两种方法)。
方法一:通过执行以下命令手动部署【推荐】
cp Release/solu-* /mnt/userdata/Solu
cp Release/simhei.ttf /mnt/userdata/Solu
方法二:在编译时加上编译参数自动部署
./build.sh cpres最后,将准备好的模型部署到板卡中(注意:模型要放到编译结果的同一目录中),执行命令如下所示。
cp /opt/model/classify.model /mnt/userdata/Solu2.5 示例方案运行
通过按键Ctrl+Shift+T创建一个新窗口,执行adb shell命令,进入板卡运行环境。
adb shell
进入板卡后,定位到例程部署的位置,如下所示:
cd /userdata/Solu运行例程命令如下所示:
./solu-selfLearning2.6 运行效果
运行打印如下:
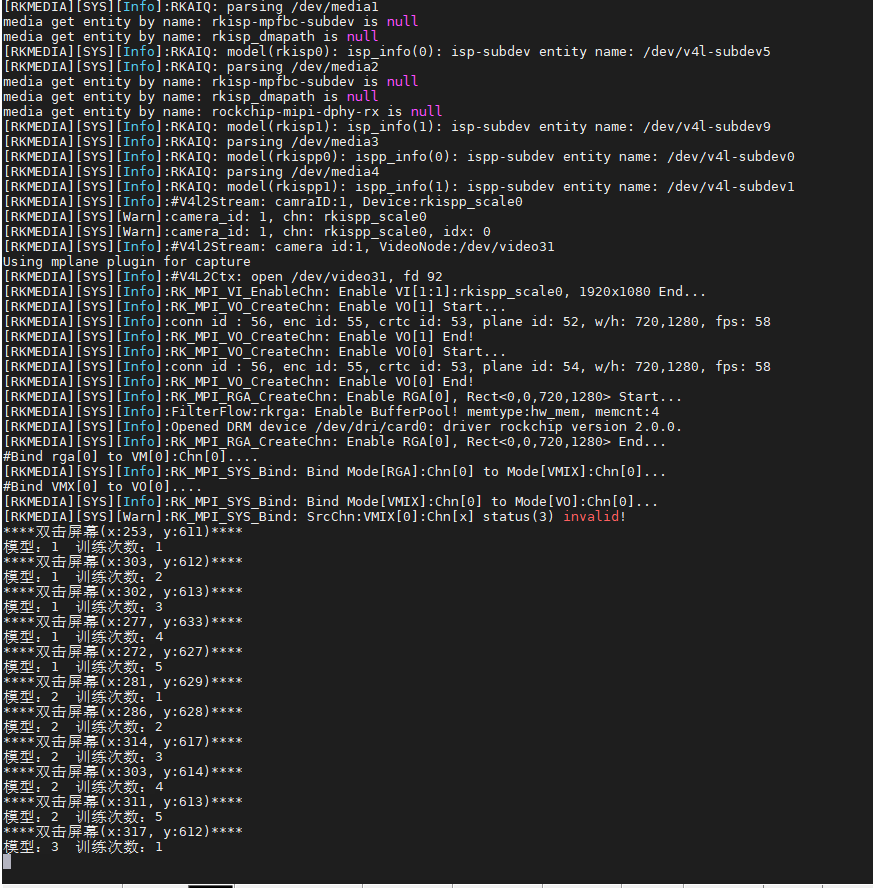
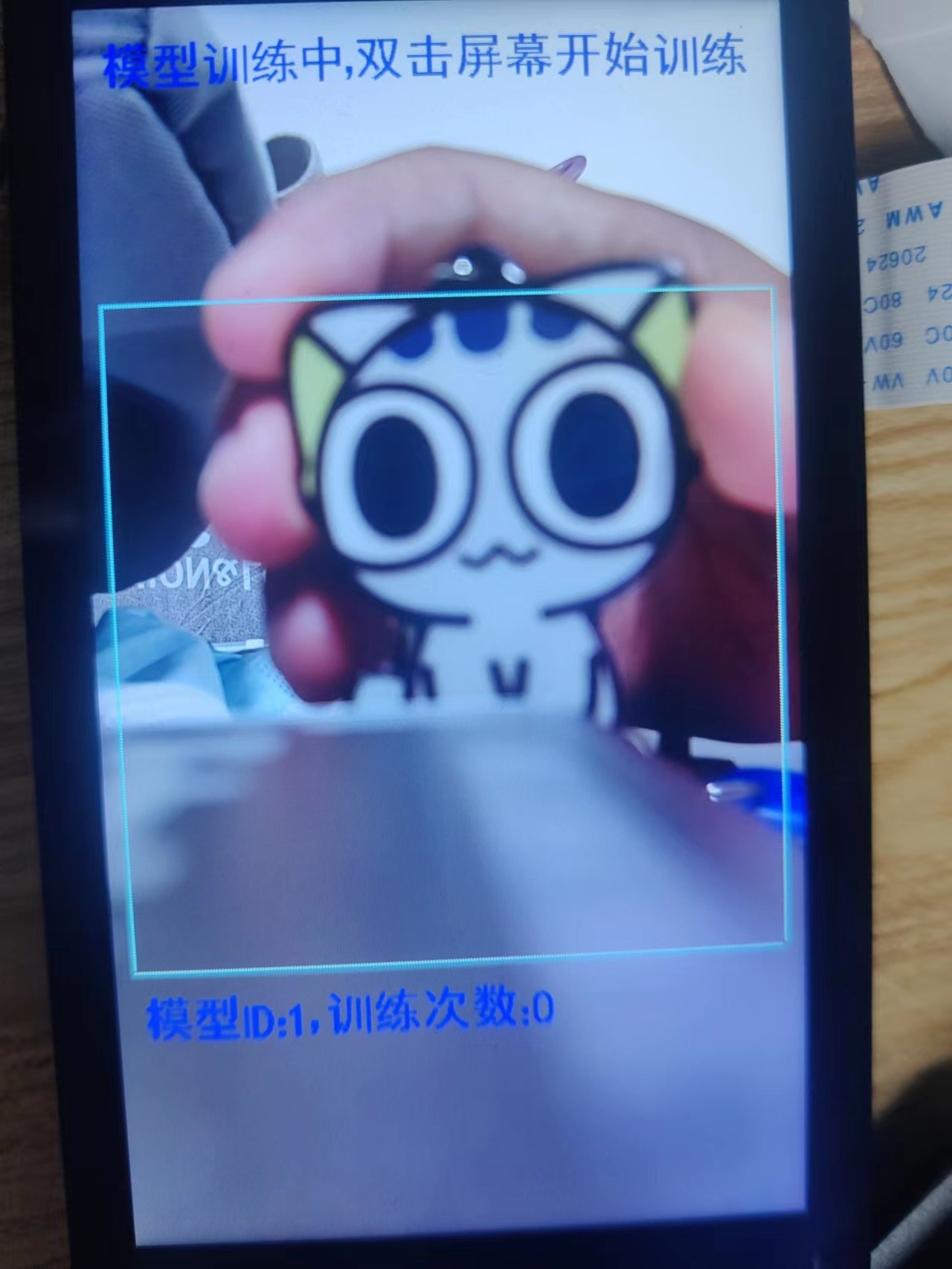
用摄像头对准训练物体,双击屏幕进行训练。一个模型训练5张图片,总共训练3个模型:
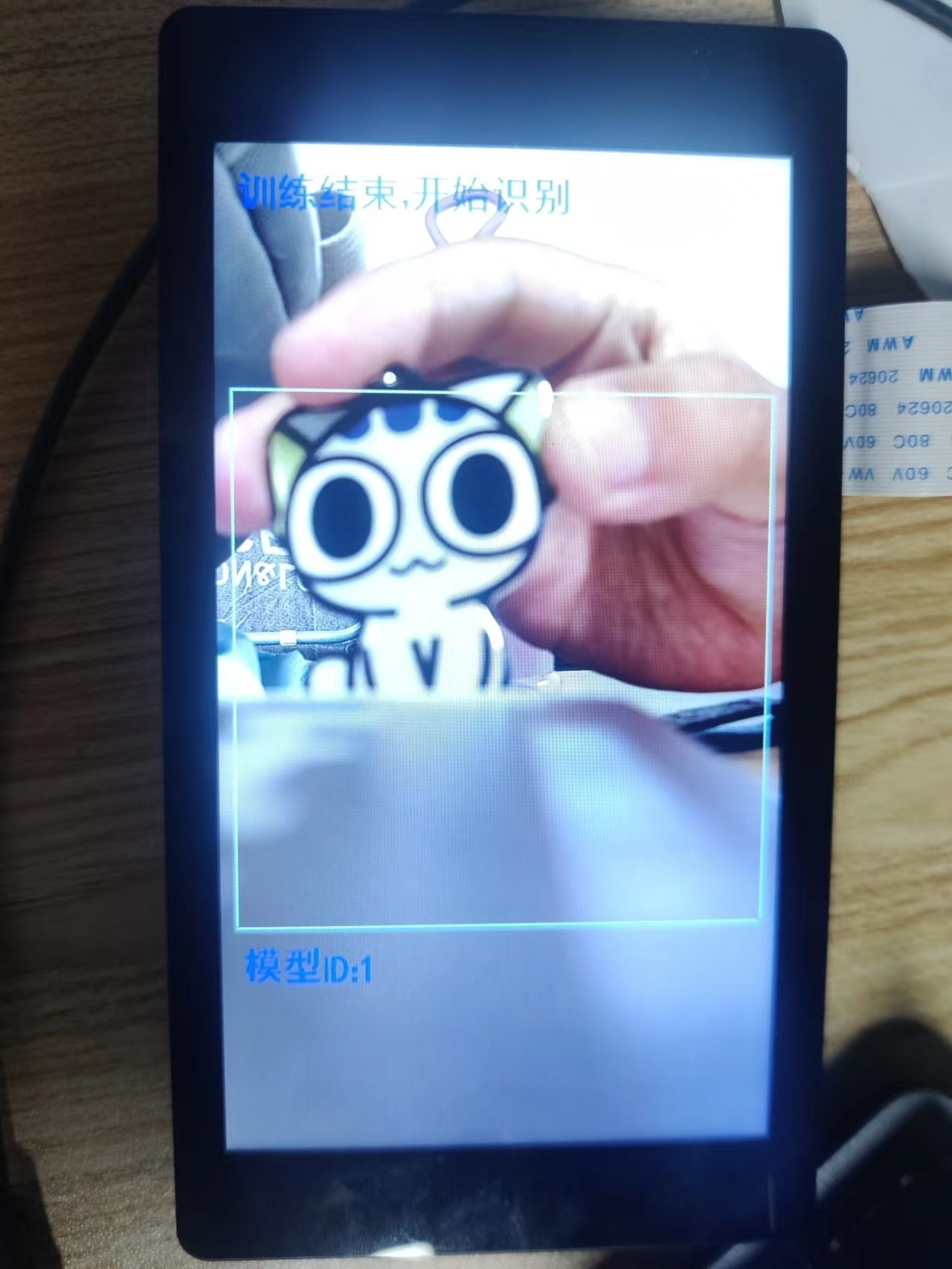
训练完成后进入识别模式:
2.7 开机启动
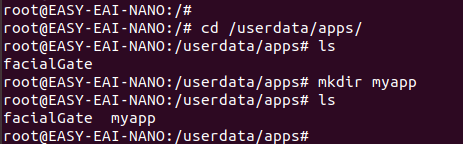
首先进入板卡环境,执行以下命令,在板卡上创建一个给本例程使用的应用目录:myapp
cd /userdata/apps/
mkdir myapp
然后回到开发环境中,通过使用“2.4方案部署”类似的操作方法,把本例程所需要的全部文件,包含:编译结果,配置文件,模型等。部署到刚刚新建的myapp目录中。
最后在板卡上创建一个run.sh脚本来管控用户所有需要的应用即可,《入门指南/应用程序开机自启动》会详细描述run.sh脚本该如何编写。
3. 代码解析
方案主逻辑代码位于:EASY-EAI-Toolkit-C-Solution/ solu-selfLearning/src/main.cpp。代码实现主要通过调用我司的easyeai-api库快速实现自学习图像分类功能,代码主体分为主线程,算法分析子线程和按键模型训练回调。
3.1 组件库组成
要实现自学习图像分类功能,需要使用到easyeai-api库的以下组件。
模组信息如下所示。
| 组件 | 头文件以及库路径 | 描述 |
| 系统操作组件 | easyeai-api/common_api/system_opt | 提供线程操作函数 |
| 摄像头组件 | easyeai-api/peripheral_api/camera | 提供摄像头操作函数 |
| 显示屏组件 | easyeai-api/peripheral_api/display | 提供显示屏操作函数 |
| 自学习组件 | easyeai-api/algorithm_api/self_learning | 提供自学习操作函数 |
| 中文字库组件 | easyeai-api/common_api/font_engine | 提供中文显示操作函数 |
| 触摸屏组件 | easyeai-api/peripheral_api/touchscreen | 提供触摸屏操作函数 |
这些组件通过CMakeLists.txt编译进工程,具体请看后续章节。
3.2 逻辑框图
项目的整体逻辑框图如下所示。
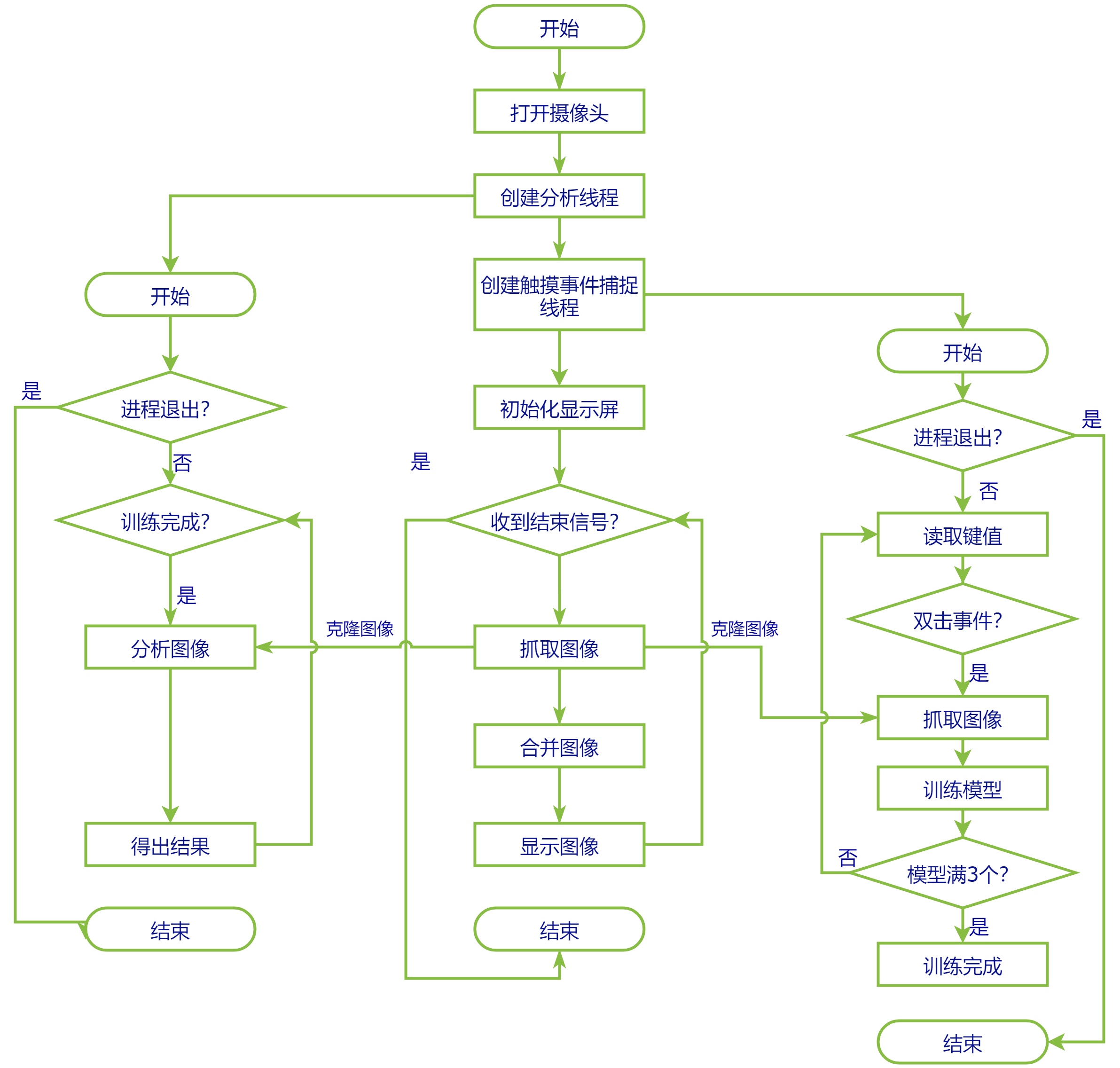
3.3 主线程
主线程处理的业务有:
- 初始化外设;
- 创建算法分析子线程;
- 创建触摸屏回调函数
- 抓图发送给到子线程;
- 抓图、显示;
本处附上主要的逻辑功能代码,其他辅助的、校验型的代码先忽略。
组件初始化操作如下,本处调用RGB摄像头。
// 1.打开摄像头
ret = rgbcamera_init(CAMERA_WIDTH, CAMERA_HEIGHT, 90);
pbuf = NULL;
pbuf = (char *)malloc(IMAGE_SIZE);
创建线程互斥锁以及线程,如下所示。
// 2.创建识别线程,以及图像互斥锁
pthread_mutex_init(&img_lock, NULL);
CreateNormalThread(detect_thread_entry, &result, &mTid);
初始化显示屏,如下所示。
// 3.显示初始化
ret = disp_init(SCREEN_WIDTH, SCREEN_HEIGHT);
抓取图像,调用clone操作。
// 4.(取流 + 显示)循环
pthread_mutex_lock(&img_lock);
ret = rgbcamera_getframe(pbuf);
algorithm_image = Mat(CAMERA_HEIGHT, CAMERA_WIDTH, CV_8UC3, pbuf);
image = algorithm_image.clone();
pthread_mutex_unlock(&img_lock);
调用显示图像,将分析的结果通过result标记出来。
// 写入文字
char label_text[50];
char label_text2[50];
if(1 == train_flag){/*识别模式*/
memset(label_text, 0 , sizeof(label_text));
memset(label_text2, 0 , sizeof(label_text2));
sprintf(label_text, "训练结束,开始识别");
sprintf(label_text2, "模型ID:%d",result);
}else{/*训练模式*/
memset(label_text, 0 , sizeof(label_text));
memset(label_text2, 0 , sizeof(label_text2));
sprintf(label_text, "模型训练中,双击屏幕开始训练");
sprintf(label_text2, "模型ID:%d , 训练次数:%d",mode_data , train_data_cnt);
}
putText(image.data, image.cols, image.rows, label_text, 30, 30, color);
putText(image.data, image.cols, image.rows, label_text2, 30, 1000, color);
IplImage tmp = IplImage(image);
CvArr* arr = (CvArr*)&tmp;
CvRect rect1 = cvRect(20,300,680,680);
drawDashRect(arr,1,2,&rect1,CV_RGB(253,255,85),2);
disp_commit(image.data, IMAGE_SIZE);
3.4 触摸屏回调函数
触摸屏回调函数,主要完成以下操作:
- 判断有双击屏幕事件发生;
- 延时监测是否图像缓冲区是否为空;
- 不为空时,证明主函数已发送图像数据过来,执行图像获取操作;
- 双击屏幕时,将主线程图像送入算法接口进行模型训练;
3.5 算法分析子线程
算法分析子线程,主要完成以下操作:
- 延时监测是否图像缓冲区是否为空;
- 不为空时,证明主函数已发送图像数据过来,线程执行图像获取操作;
- 调用模型分类分析函数;
- 记录模型ID,用于主线程图像合成操作;
延时监测是否有图像,操作如下所示。
if(algorithm_image.empty()) {
usleep(5);
continue;
}
获取图像操作如下所示。
pthread_mutex_lock(&img_lock);
image = algorithm_image.clone();
pthread_mutex_unlock(&img_lock);
调用模型分类函数,算法得到的目标结果记录于*share_para内,如下所示。
// 算法分析
*share_para = self_learning_inference(classify_ctx, image, train_data, train_data_count, k_value);
4. 开发指南
4.1 示例文件&目录结构
Solution git仓库会随着产品迭代更新,不断新增解决方案代码,当前截图只作参考。
4.1.1 Solution git仓库目录介绍。
Solution工程构成如下所示,由功能组件easyeai-api和各个解决方案构成。
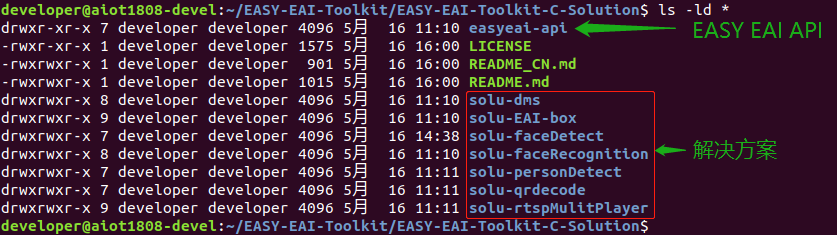
单个“solu-”开头的目录即为一个解决方案案例,代码内调用“EASY EAI-API”来满足某一实际应用场景的需求。
功能组件的描述如下所示,easyeai-api是经过高度封装的易用性组件接口,便于用户直接调用板卡资源。
| 功能 | 组件目录 | 组件子目录 | 描述 |
| 功能组件 | easyeai-api | algorithm_api | 算法组件 |
| common_api | 通用组件 | ||
| media_api | 多媒体组件 | ||
| netProtocol_api | 网络协议组件 | ||
| peripheral_api | 外设硬件组件 |
4.1.2 解决方案最基本的目录构成。
每个解决方案就是一个独立的项目,项目内包含部分如下所示,项目使用cmake构建自动编译部署。
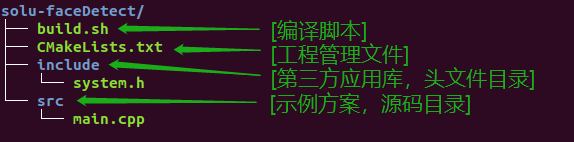
具体介绍如下所示。
| 组成部分 | 描述 |
| build.sh | 编译脚本,用于管理生成可执行文件后的部署准备工作,用户可自定义shell命令 |
| CMakeLists.txt | 工程管理文件,用于组织整个工程结构,指导cmake生成Makefile |
| include | 用于存放第三方应用库、头文件目录等 |
| src | 用于存放实现本方案需求的源代码 |
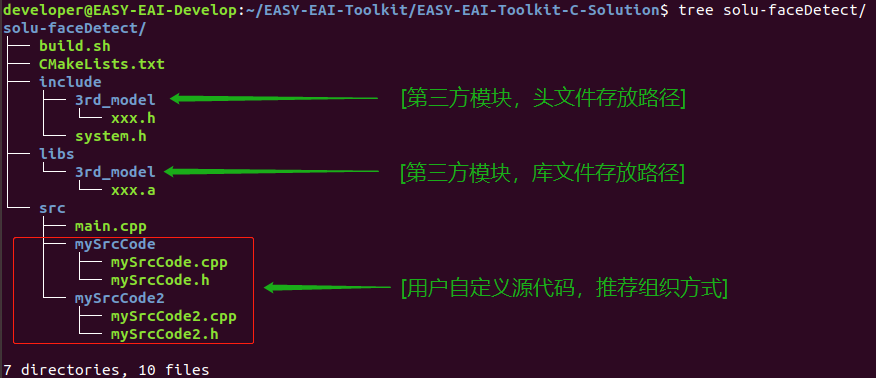
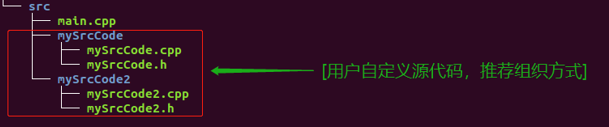
- 增加已编译的第三方库,在include、libs目录内添加头文件和库文件;
- 增加用户自定义的功能模块,推荐在src目录内增加;
具体情况如下所示,第三方模块相关的文件由include/3rd_model/xxx.h、libs/3rd_model/xxx.a。自定义的功能模块为src/mySrcCode、src/mySrcCode2。
4.2 CMakeLists.txt文件解析
4.2.1 编译环境配置部分:
第一部分为配置部分,配置部分如下所示。(获取当前方案目录、配置工具链、提取方案名称):
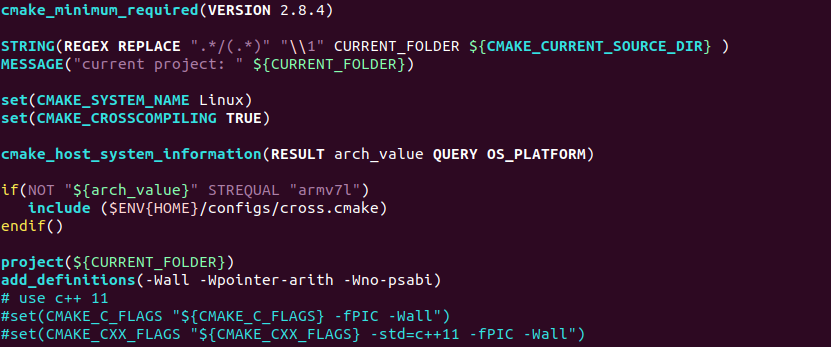
配置信息如下所示。
| 配置项 | 描述 |
| CMake要求版本 | cmake_minimum_required函数指定,要求的最低版本 |
| CMAKE_SYSTEM_NAME | cmake的系统类型,交叉编译必须 |
| CMAKE_CROSSCOMPILING | cmake是否启动交叉编译 |
| cross.camke | camke_host_system_information获取平台信息,发现不是armv7l就导入当前平台的交叉编译配置。 |
| project项目名 | 由project函数指定 |
4.2.2 easyeai-api配置部分
第二部分是引入我司的功能组件库(针对当前方案进行:配置EASY EAI API头文件目录、库文件目录以及配置库链接参数):
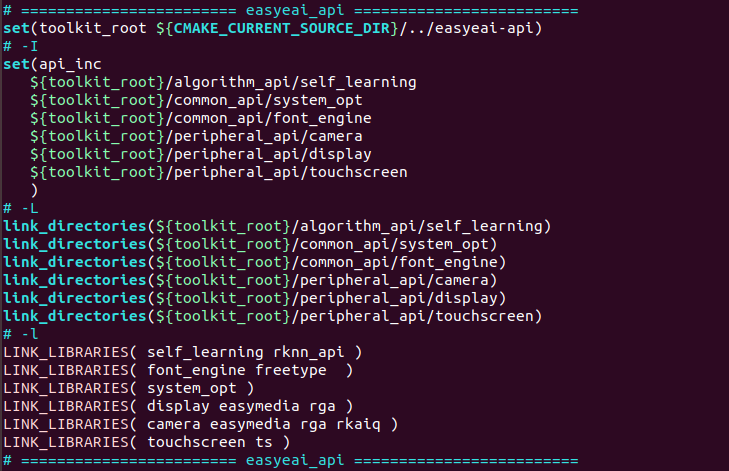
配置信息如下所示。
| 配置项 | 描述 |
| api_inc | 最终通过target_include_directories函数指定目标包含的头文件路径 |
| link_directories | 由link_directories函数指定easyeai-api库所在路径 |
| LINK_LIBRARIES | 由LINK_LIBRARIES函数指定easyeai-api库文件 |
4.2.3 第三方库配置部分
第三部分配置第三方的库(针对当前方案进行:配置第三方头文件目录、库文件目录、配置第三方库链接参数以及配置源码目录):
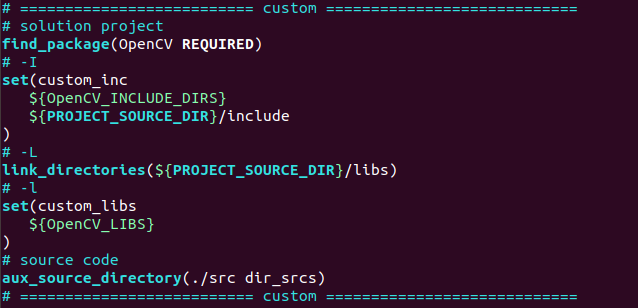
配置信息如下所示。
| 配置项 | 描述 |
| custom_inc | 自定义变量custom_inc,最终通过target_include_directories函数指定目标包含的头文件路径,在源码include目录下 |
| link_directories | 由link_directories函数指定第三方库所在路径 |
| custom_libs | 自定义变量custom_libs,最终通过target_link_libraries函数指定目标引用的库链接参数 |
| aux_source_directory | 自定义变量dir_srcs,用于添加工程代码以及自定义的个人代码 |
例如添加个人库的目录组成方式如下所示。
aux_source_directory的修改方式为:
aux_source_directory(./src ./src/mySrcCode ./src/mySrcCode2 dir_srcs)或
aux_source_directory(./src dir_srcs)
aux_source_directory(./src/mySrcCode dir_srcs)
aux_source_directory(./src/mySrcCode2 dir_srcs)
4.2.4 本方案配置部分
第四部分配置项目的编译信息,内容如下所示:

配置项如下所示。
| 配置项 | 描述 |
| add_executable | 编译结果为${CURRENT_FOLDER}指定,即方案目录名; 编译的源文件为${dir_srcs}指定; |
| target_include_directories | 指定头文件的名字,由${api_inc}与${custom_inc}指定; |
| target_link_libraries | 指定额外的库,例如opencv的库等 |
4.3 build.sh编译脚本:
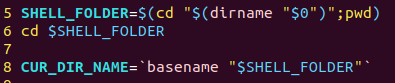
4.3.1 路径定位部分
第一部分用于提取目录用于编译操作,内容如下所示:(进入build.sh脚本所在目录,并且提取当前目录绝对路径,提取当前目录名称)
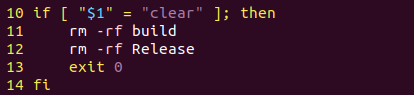
4.3.2 清除编译部分
第二部分清除操作,清除目录为build、Release,内容如下所示:(执行build.sh脚本时,带入了参数“clear”,则清空编译输出)
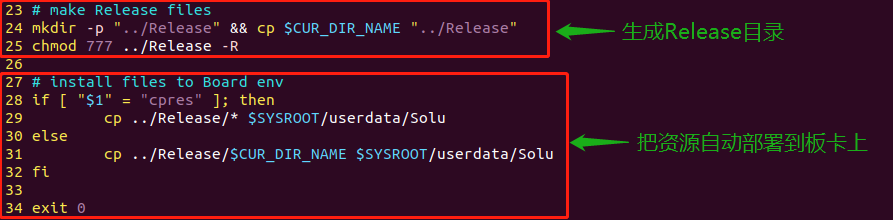
4.3.3 编译操作
第三部分,编译直接调用cmake,内容如下所示:(重新编译,成部署目录,并把资源自动部署进板卡)


















 4670
4670

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









