






Matlab机械臂综合仿真平台,包含运动学、动力学和控制。
MATLAB机器人仿真正逆运动学simulink轨迹规划 机械臂动力学控制等 gui控制仿真平台PUMA机器人 robotics toolbox

Matlab机械臂综合仿真平台,是一种方便、高效的机械臂仿真工具,它能够对机械臂系统模型进行完整的功能仿真。这个平台包含了运动学、动力学和控制,能够模拟机械臂工作的整个过程,从而加快了机械臂的设计与开发周期。
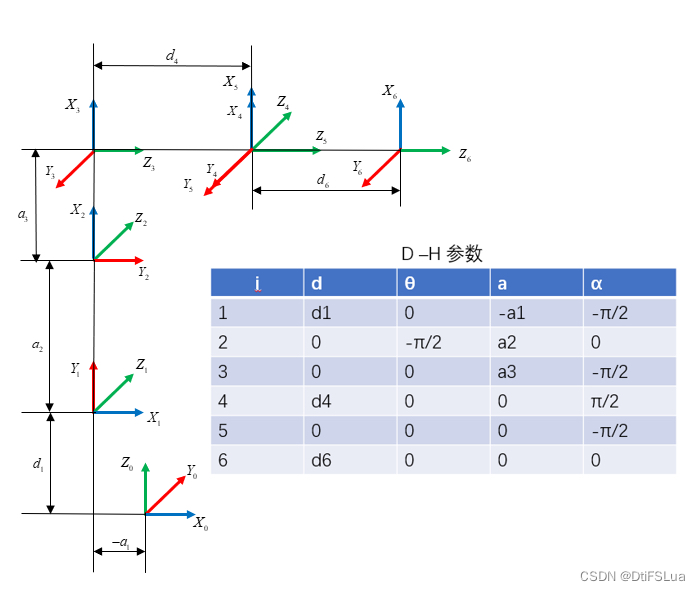
在Matlab机械臂综合仿真平台中,运动学是其中一个重要的方面。它是通过对机械臂运动学方程的分析,在平面或者空间中建立机器人运动学模型。这个模型包含了机械臂的关节角度、末端位置和姿态等信息,能够有效地进行路径规划和轨迹控制。
除了运动学,动力学也是Matlab机械臂综合仿真平台的重要组成部分。动力学是以牛顿定律为基础的,用于研究机械臂的力学运动。在机械臂系统的设计中,动力学模型可以帮助工程师更好地了解机械臂的运动过程,并对其进行优化。
在Matlab机械臂综合仿真平台中,控制也是非常关键的一个部分。控制系统的设计和优化是机械臂设计中必不可少的环节。通过控制系统仿真,可以更好地了解机械臂的动态特性,并对其进行运动轨迹规划和控制。同时,控制系统的优化也能够使机械臂的工作效率更高,精度更高。
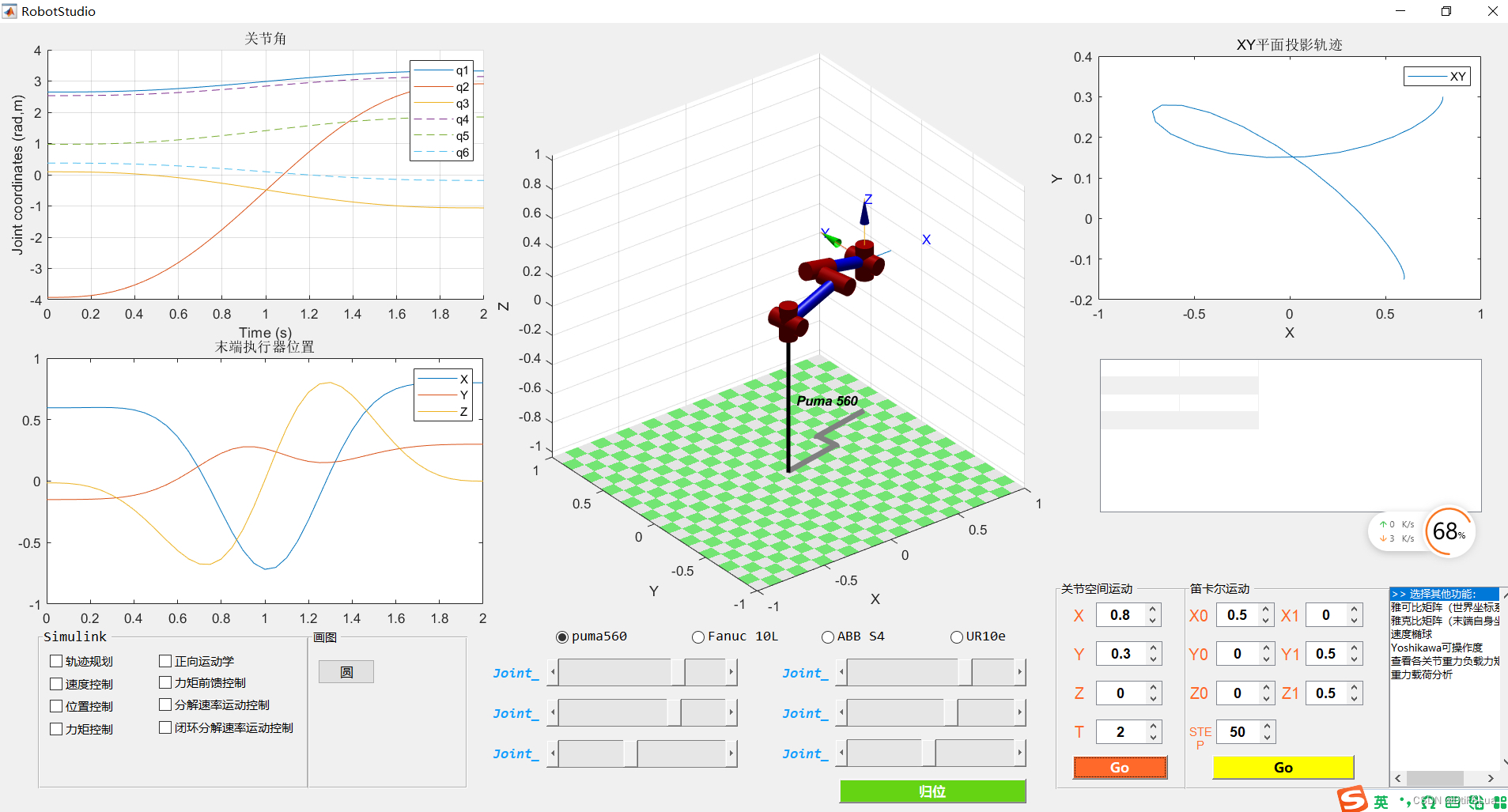
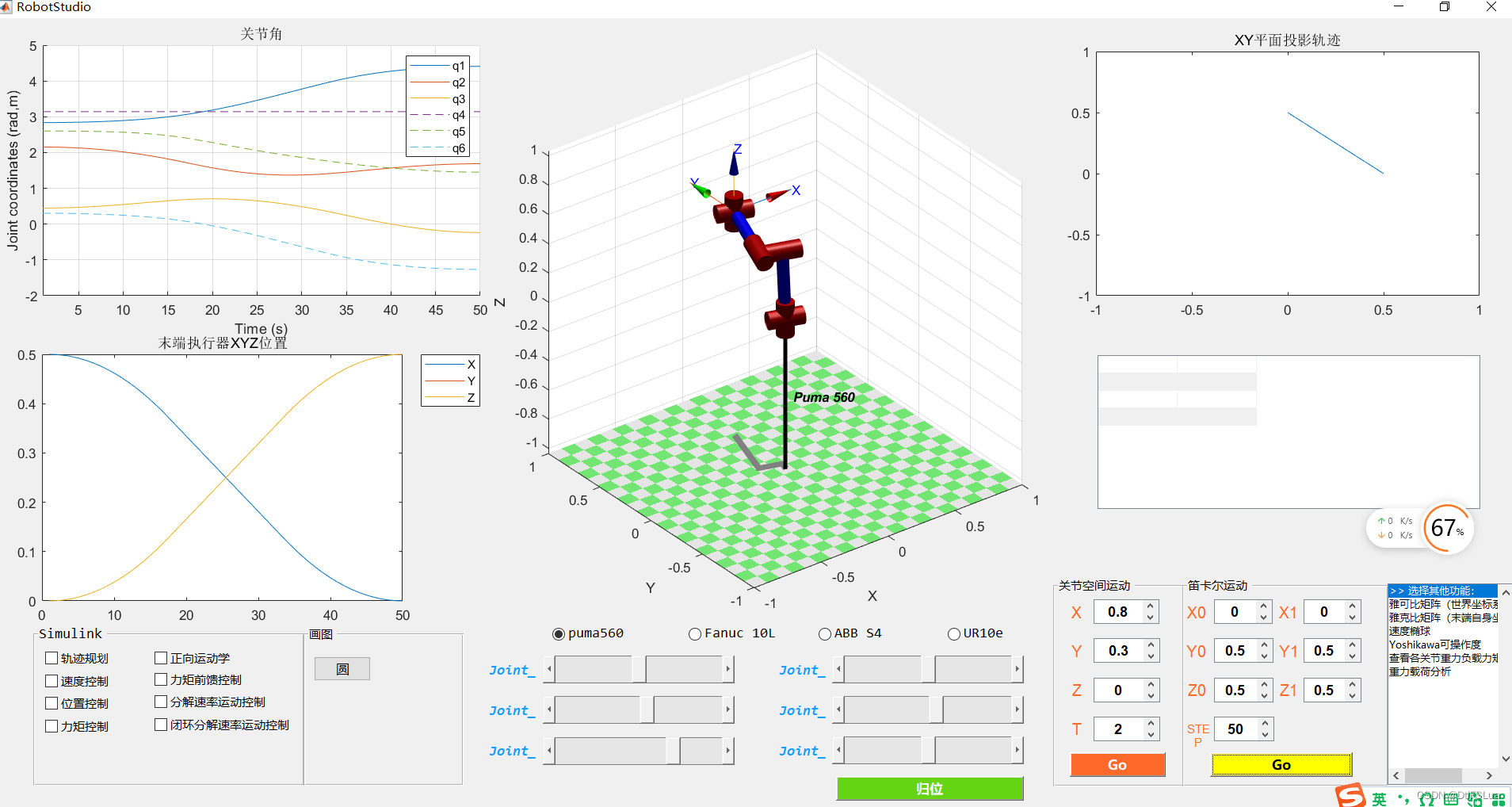
Matlab机械臂综合仿真平台还包含了正逆运动学、simulink轨迹规划以及机械臂动力学控制等功能。正逆运动学是解决机械臂运动学问题的基础,可以帮助工程师更好地进行机械臂的路径规划和轨迹控制。而simulink轨迹规划功能则是可以在仿真环境中,对机械臂的轨迹进行规划和优化。机械臂动力学控制则是对机械臂系统进行控制,使其能够按照期望轨迹进行运动。
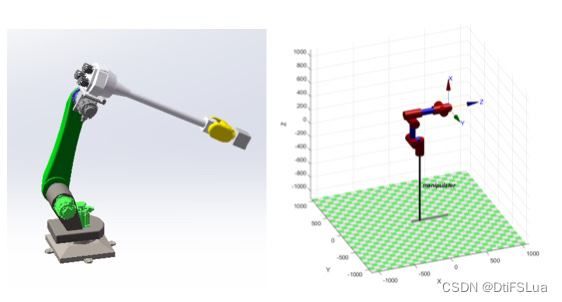
此外,Matlab机械臂综合仿真平台还包含了gui控制仿真平台,可以实现对机械臂的可视化仿真与控制,使工程师更好地了解机械臂的工作状态,并进行相应的设计优化。
总而言之,Matlab机械臂综合仿真平台是一种非常优秀的机械臂仿真工具,包含了运动学、动力学和控制等多个方面,可以实现对机械臂的整个工作过程进行仿真,并进行优化和控制。同时,正逆运动学、simulink轨迹规划、机械臂动力学控制等功能,也为机械臂的设计与开发提供了强有力的支持。
相关代码,程序地址:http://lanzouw.top/668081184412.html



















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









