




 该博客主要介绍机器人路径规划相关内容。包含全局路径规划的A*、Dijkstra、RRT、JPS等算法,提供学习参考和流程介绍,还有在线仿真平台可对比算法、查看搜索过程。此外,还提及局部路径规划的局部避障动态窗口法。
该博客主要介绍机器人路径规划相关内容。包含全局路径规划的A*、Dijkstra、RRT、JPS等算法,提供学习参考和流程介绍,还有在线仿真平台可对比算法、查看搜索过程。此外,还提及局部路径规划的局部避障动态窗口法。
收藏以供学习中随时查阅:
一. 全局路径规划:
1.A*
学习参考
Introduction to the A* Algorithm及仿真对比
流程详细介绍
A算法简介
A寻路算法讲解+源码DEMO演示
2.Dijkstra
3.RRT
…
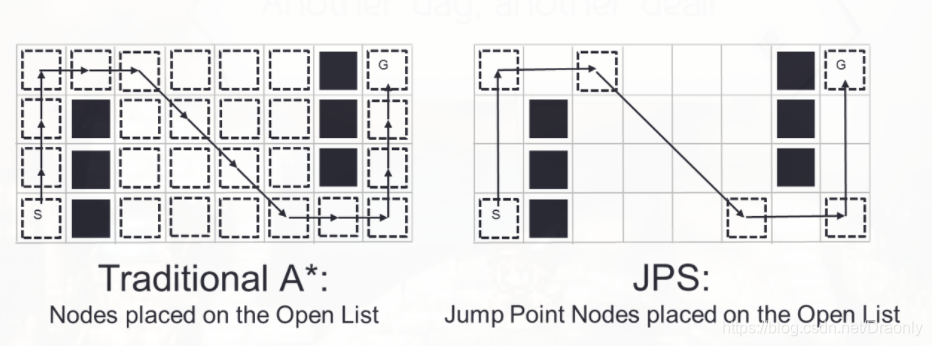
4.JPS(Jump Point Search)
流程:

JPS 与A*算法扩展节点的对比如下:
在线仿真
在线仿真平台,这里可以直接直观的对比上述几种算法,并且可以选择不同的启发函数,方便好用。
另外BFS/DFS/Dijkstra/A*仿真对比这里也可以直观看到路径的搜索过程。
二.局部路径规划:
局部避障的动态窗口法(dynamic window approach),论文
dynamic window based approach tomobile robot motion control in the presence of moving obstacles

















 1万+
1万+

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









