





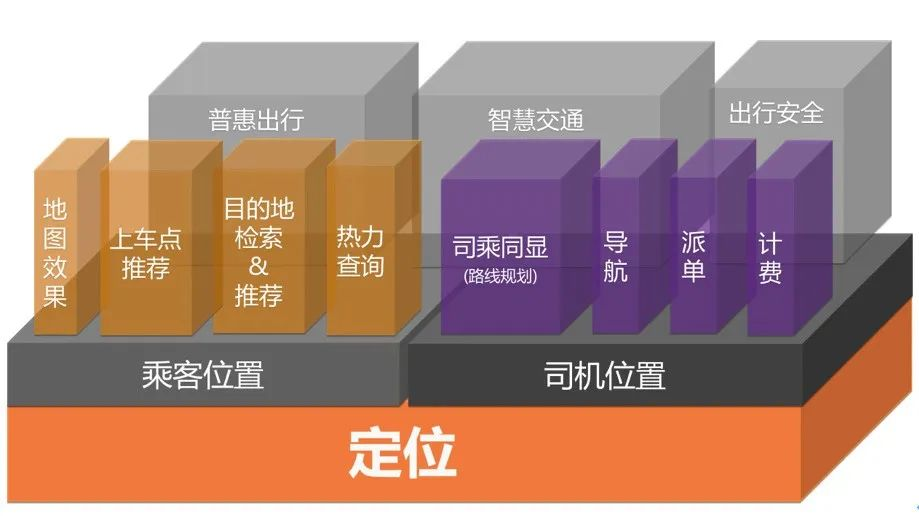
桔妹导读:定位是所有LBS服务的基础服务。在滴滴的业务场景下,定位主要是指各类终端设备的位置,包括手机、单车、行车记录仪、车机端等。作为底层服务,在滴滴日均提供700亿次定位服务,支撑着平台的各类业务。
今天给大家分享的是机器学习在滴滴网络定位中的实践工作,会重点介绍三阶段的演进:无监督模型、有监督回归模型、端到端CNN模型。
1.
什么是网络定位

目前定位技术主要包括GPS、网络定位、惯性航位推算、MM(地图匹配)、视觉定位等。GPS是最为人熟知的定位技术,是依靠设备与卫星交互来获取经纬度的方式。GPS精度高,但有冷启动耗时长、耗电大、遮挡场景不可用等缺点。在滴滴场景下,乘客和司机在有遮挡的场景下,例如室内、高架下等,GPS通常处于不可用状态。这时就需要有其他定位技术作为GPS的补充,使得乘客发单、司机导航等服务依然可用。其中最主要的补充便是网络定位。
室内类场景虽然有遮挡,但设备通常可以扫描到Cell(基站)和Wifi列表,而且Cell和Wifi设备位置相对稳定,连接其上的设备可以借其定位,这就产生了网络定位。网络定位包括wifi定位和基站定位,是指基于终端扫描到的wifi或基站列表进行的定位技术。Wifi的接入设备通常称为AP(Acess Point),方便起见,下文将AP和基站统称为AP。
网络定位通常采用的是指纹定位技术,是一个根据query匹配指纹库信息,并计算得到坐标位置的过程。如下图所示,网络定位系统主要包括离线建库和在线定位两个阶段。
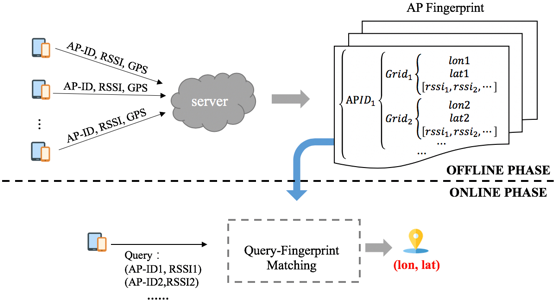
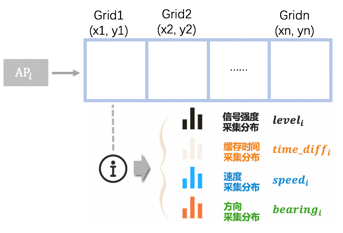
离线建库主要是基于有GPS时的采集数据,建指纹库的过程。指纹库中记录AP的各类信息在不同地理网格内的采集数据分布,如下图所示。
在线阶段,根据线上query匹配指纹库信息,并计算得到坐标位置。
本文介绍的主要是在线定位部分,即query匹配指纹库、计算坐标位置。
2.
网络定位匹配算法迭代
在线定位算法共经历了无监督概率模型、有监督回归模型、端到端CNN模型三次大的迭代。前两个阶段的网络定位主要包括网格召回、网格排序、网格平滑三步,如下图图一所示。端到端CNN模型去除了网格排序和网格平滑,基于一个召回中心点,直接回归位置坐标,如下图图二所示。
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章



















 522
522

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









