




概念:
图像匹配是对两张相似的照片(不同角度,不同光照,不同大小,不同放射等)进行关键点的寻找连接。和“找不同”游戏有着相似的步骤,先观察两张图像的特征,再根据经验进行配对。只不过图像匹配找的是相同,“找不同”游戏找的是不同。
步骤:
1)提取图像的特征点
2)对图像特征点进行描述(包含特征点的位置,尺度,方向等信息)
3)计算两张图像的候选特征点的距离,选择相似度高的点进行匹配
综述:
1)Image Matching from Handcrafted to Deep Features: A Survey
这是一篇接近50 pages的博士论文,引用参考文献400+,整体架构清晰。我一直对三个步骤以及传统的匹配算法没有一个明确的界限,看完之后清晰了很多。
2)我主要阅读了框架的这些部分:
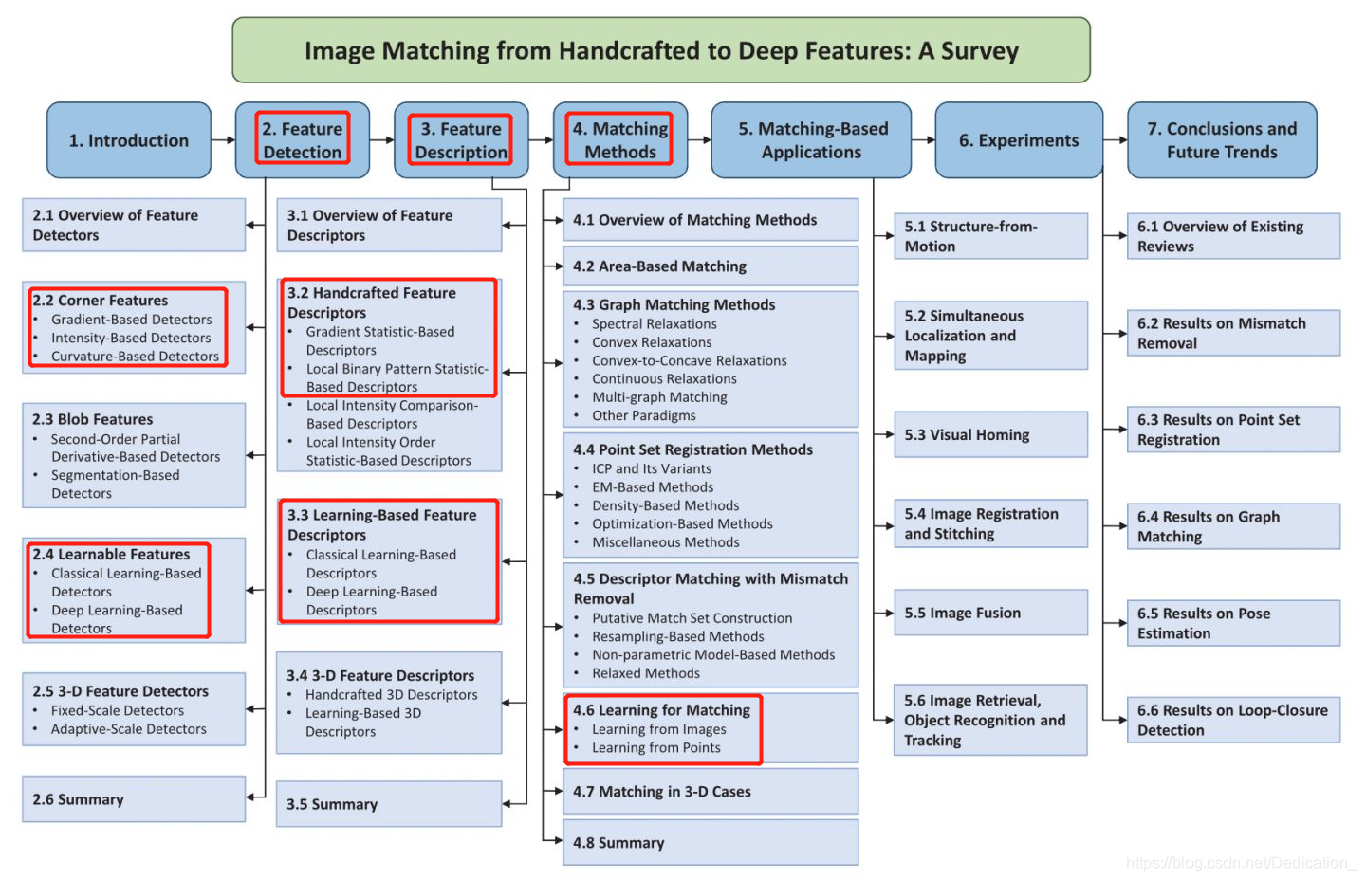
通过图可以看到,作者将图片匹配分为三个步骤,分别对特征提取器,特征描述子,特征匹配方法进行了调研总结;
随着机器学习的流行,也有相应的基于学习的特征提取器,特征描述子,特征匹配方法;
研究3-D图像匹配的同学也可以查阅论文相关信息,具体和2-D有相似的地方,但会多了位姿处理等;
介绍:
参考作者的架构图,我也做了一个类似的~ 来介绍我接下来介绍的详略情况:
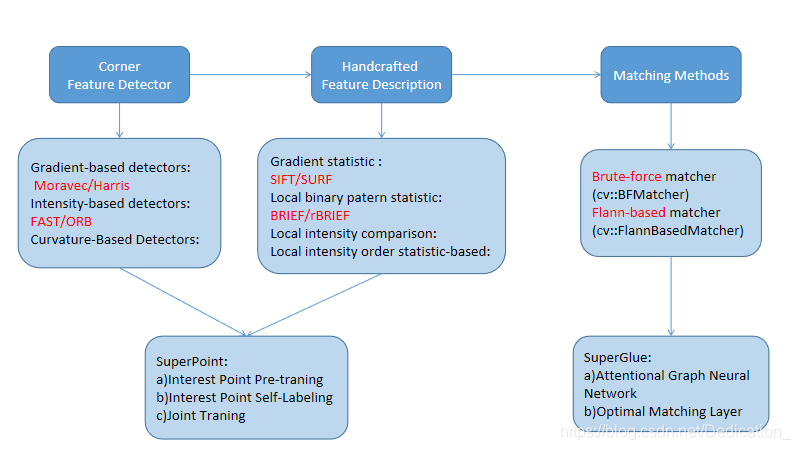
我会按照图像匹配的顺序,分别介绍一些传统的算法;
1)角点检测器可以分为基于梯度的、基于强度的、基于曲率的;
基于梯度(计算灰度的加减法)的检测器比较著名的是:Maravec和Harris,实际上Harris是在Maravec基础上发展过来的,具有更高的可靠性;
基于强度(比较灰度的大小关系)的检测器比较著名的是:FAST和ORB,实际上ORB也是在FAST基础上发展过来的,使得提取的特征具有尺度不变性和旋转不变性;
基于曲率的检测器实际上由多个步骤组成,虽然计算成本高,但是它可以用在特定的领域;
2)手工的特征描述子可以分为基于梯度统计,基于局部二进制统计,局部强度比较和局部定向强度统计;后面两种方法和前面大同小异,这里只介绍基于梯度统计的:SIFT和SUFT and 基于局部二进制统计的:BRIEF和rBRIEF;
3)图片匹配方法比较传统的就是暴力和KNN了,这两个方法cv库都有提供;
4)我还会介绍基于学习的一个比较高效的特征描述子SuperPoint,以及基于图神经网络完成特征匹配的SuperGLue;
特征提取器:
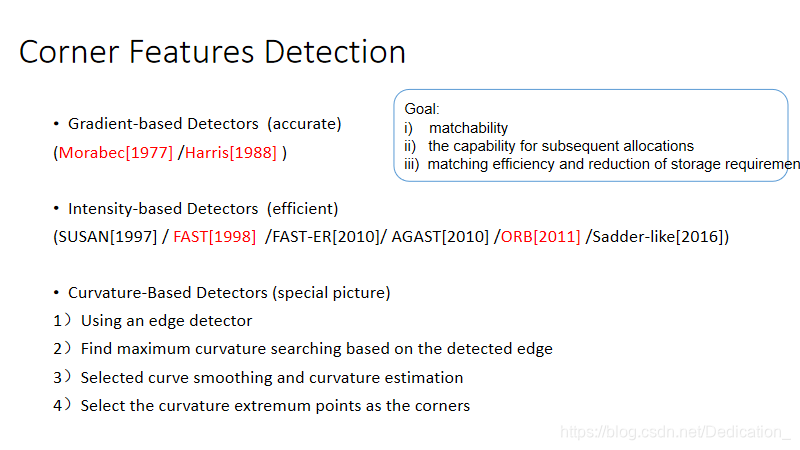
先说说这三种类型的不同:
基于梯度的很明显效率不高,但是能够达到比较高的特征提取精度;
基于强度的因为不用计算梯度,只需要进行强度大小的比较,所有效率高,比较适合实时特征提取;
基于曲率的分为四个步骤:
1)首先得有个边缘检测器,对图像的边缘进行提取;
2)从提取的边缘中选取曲率较大的边缘进行保留;
3)对挑选的边缘进行光滑,降低噪声的影响,对曲率的边进行再估计;
4)选择指定曲率以上的特征点作为关键点;
基于曲率的检测器因为需要进行边缘的提取,还有后续的多种处理步骤,效率比较低,但是适合用在没有什么纹理的图像上,比如医学图像或红外线图;
这些特征检测器的共同的目标是:a)使得后续的匹配具有可行性b)对后续的各种算法具有可移植性c)实现匹配的高效性和存储的低容性;
基于梯度的检测器
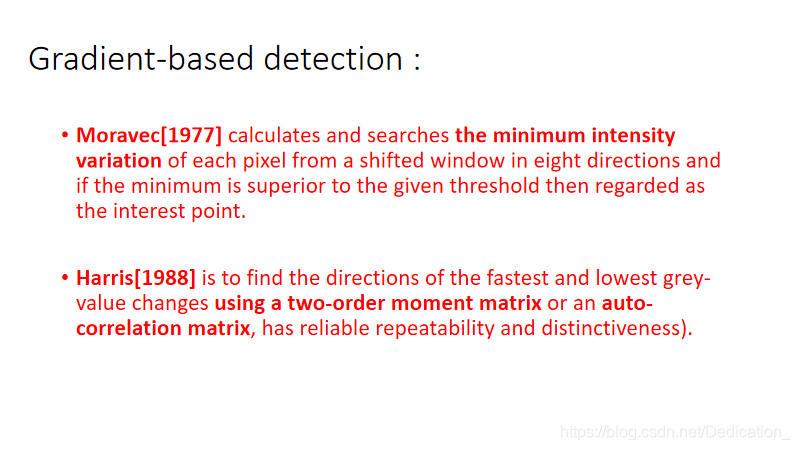
Moravec由1977提出,也是特征检测器的开山之作,通过设定一个阈值,当图像强度变化值大于阈值便视为角点;
Harris由1988提出,使用一个矩阵完成窗口特征的提取,重定
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章


















 165
165




 到【灌水乐园】发言
到【灌水乐园】发言







